博客转载自:https://blog.csdn.net/zhanghm1995/article/details/82468754
话题录制
录制所有发布出来的话题,此时默认将话题保存在一个以当时时间戳命名的文件夹中:
rosbag record -a
录制指定话题:
rosbag record /topic1 /topic12
话题回放
基本回放
rosbag play <your bagfile name>
等待一定时间之后发布bag文件中的内容
rosbag play <your bagfile name> -d <delay time>
按一定频率回放,-r选项用来设定消息发布速率,如下面命令则表示以3倍原始速率发布话题
rosbag play -r 3 <your bagfile name>
回放指定话题
rosbag play <your bagfile name> --topics <topics>
其他指令
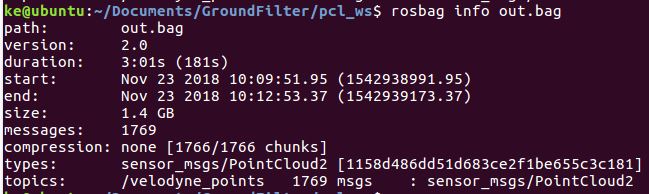
显示bag文件中所包含话题的名称、类型和消息数量:
rosbag info <your bagfile name>
回放除了某个话题以外的所有话题
rosbag filter file.bag file-no-tf.bag "topic != '/tf'"
创建一个除了/tf消息的新包