掌握rosbag工具,编写c++包录制、读取、截断和回放样例
1 资料
ROS提供了一套工具,用来记录和回放程序运行时的topic数据,即rosbag工具。这套工具对测试机器人软件非常高效,即使是自动驾驶行业,也是深度使用这个工具。
本章先介绍rosbag的命令行用法,以及rostopic处理bag包的相关命令,分别是bag录制,读取,截断和回放。最后使用 c++ 编码实现相关的命令行功能,掌握 ros 处理bag包的API。本章参考资料如下:
(1)《机器人操作系统(ROS)浅析》[美] Jason M. O’Kane 著 肖军浩 译,第9章
(2)ros Tutorials 初级教程的10,17和18节: ros Tutorials
(3)chatgpt 4.0 (写代码大量参考了chatgpt给的样例,尽管不怎么solid)
2 正文
2.1 rosbag命令行工具
2.1.1 rosbag录制
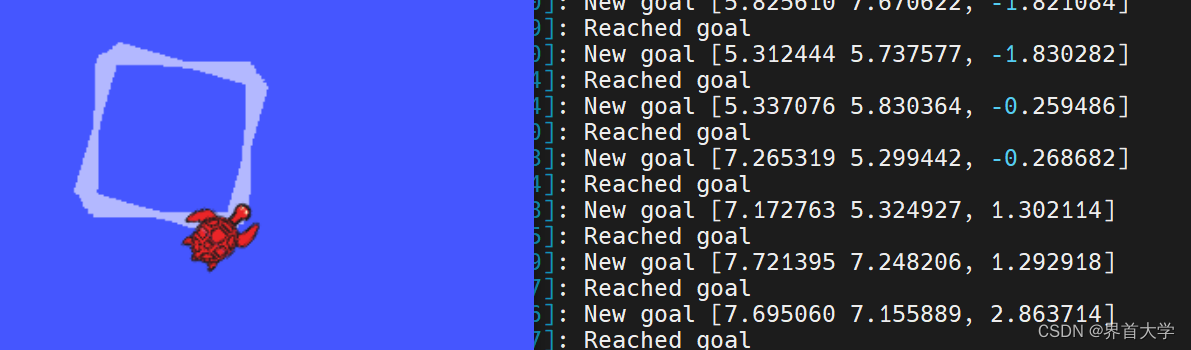
(1)本节以turtlesim软件包为基础,演示rosbag包录制。首先,开四个窗口,分别执行:
roscore
rosrun turtlesim turtlesim_node
// 这个程序负责向turtlesim_node发送运动命令,让小乌龟画四方形
rosrun turtlesim draw_square
// rosbag record是录制bag的命令,并指定topic和bag名
rosbag record -O square_cmd_1.bag /turtle1/cmd_vel /turtle1/pose
// 录制所有topic,bag名会默认以时间戳命名
rosbag record -a

2.1.2 rosbag查看基本信息,读取内容和截断
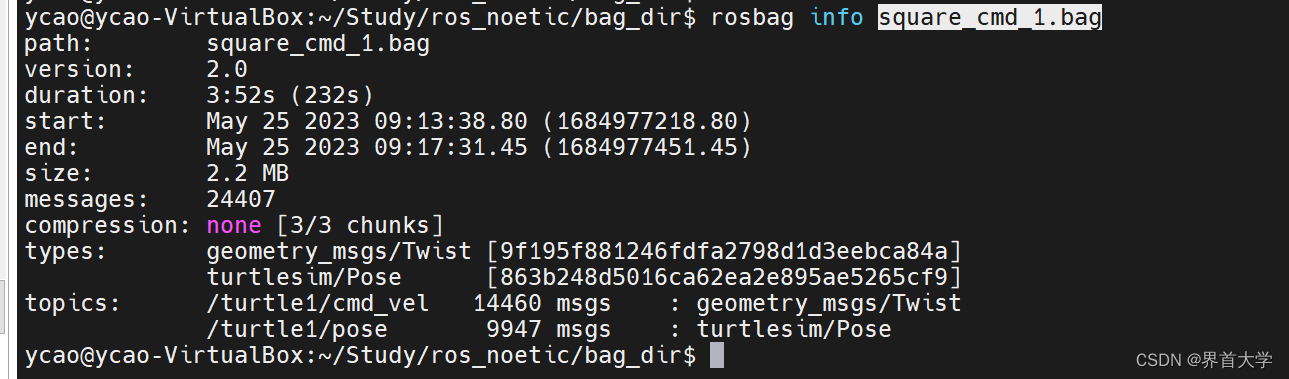
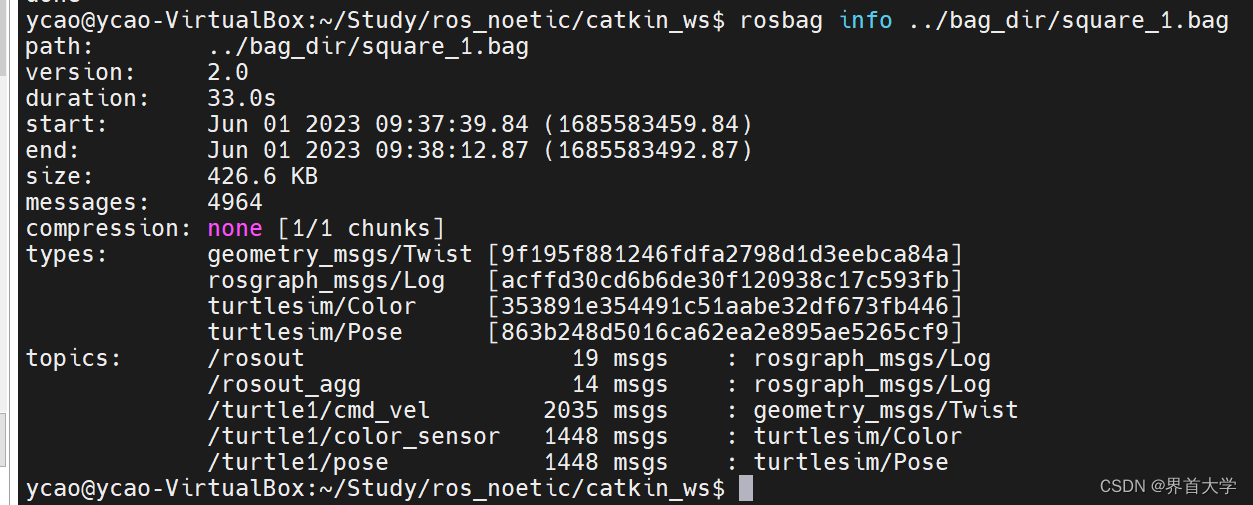
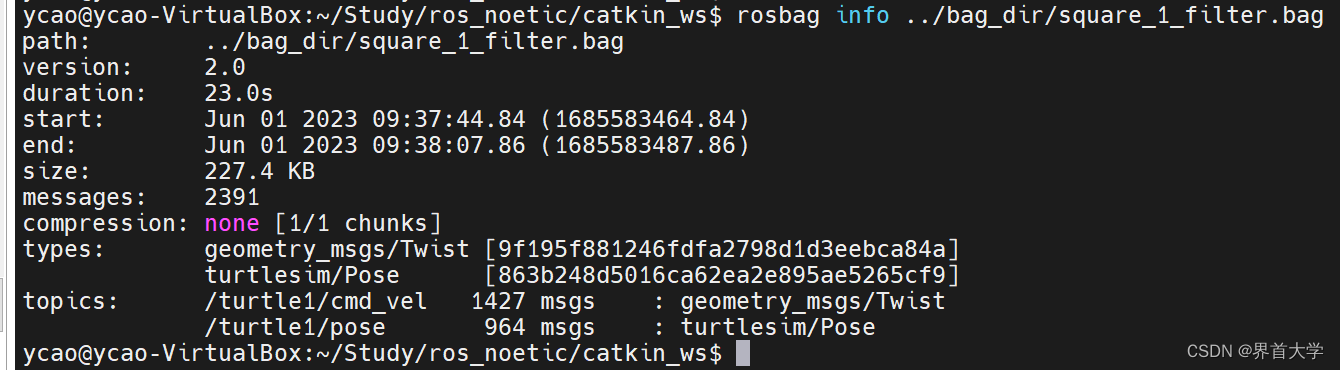
(1)查看rosbag包的基本信息,可以看到包长,消息个数,类型,topic名,msg名
rosbag info square_cmd_1.bag
(2)读取rosbag包指定 topic 的所有 msg 内容
rostopic echo -b square_cmd_1.bag /turtle1/cmd_vel
rostopic echo -b square_cmd_1.bag /turtle1/pose


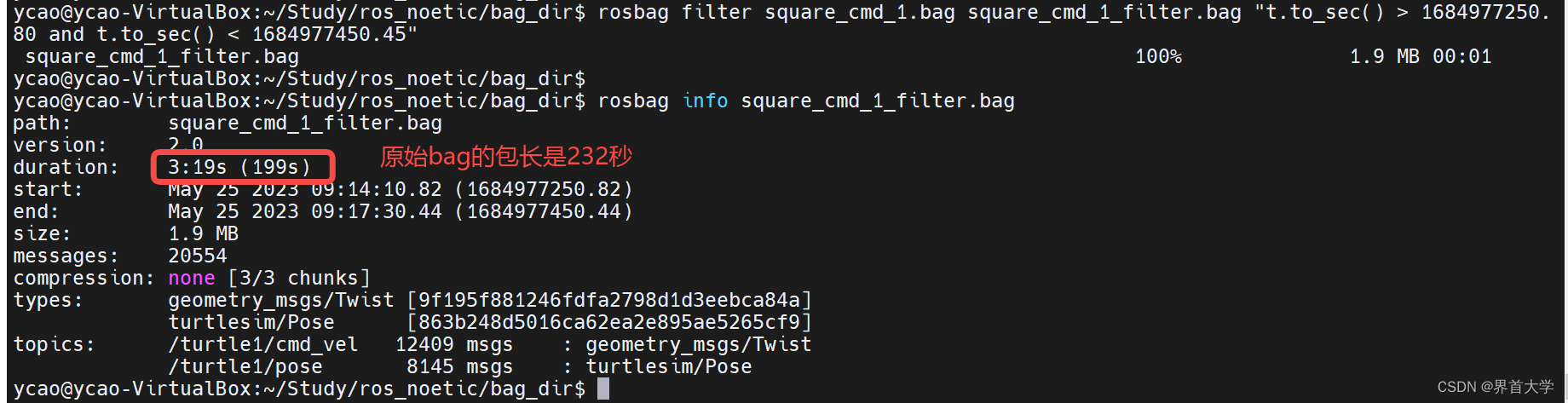
(3)按照时间片,截断rosbag包,生成一个新的短包
rosbag filter square_cmd_1.bag square_cmd_1_filter.bag "t.to_sec() > 1684977250.80 and t.to_sec() < 1684977450.45"
2.1.3 回放rosbag
(1)首先关闭前面的dram_square程序,然后在录制bag的窗口,执行:
rosbag play square_cmd_1_filter.bag
// 如果想倍速播放,可以使用 -r;
rosbag play -r 2 square_cmd_1_filter.bag
// 如果想偏移起点播放,可以使用 -s;
rosbag play -s 100 square_cmd_1_filter.bag
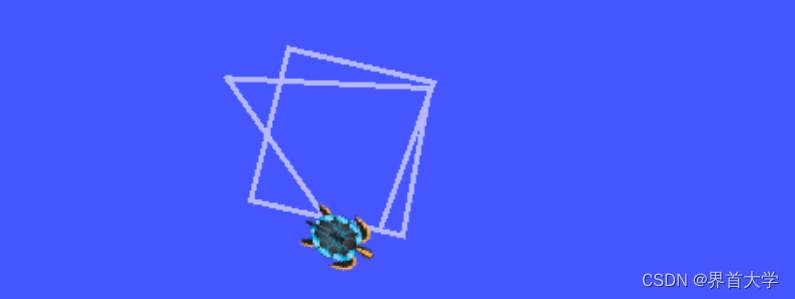

(2)仔细观察可以发现,回放的小乌龟轨迹与draw_square执行的结果是不一样的,ros Tutorials的第17节 录制和回放数据 里有一段解释:

2.2 C++实现rosbag命令行工具
2.2.1 C++录包样例
(1)创建 rosbag_test 软件包和文件,这个软件包将实现bag录制,读取,截断和回放四个功能,这里先讲解bag录制
cd ~/catkin_ws/src/cpp
// topic_tools 是用来写rosbag play程序用的
catkin_create_pkg rosbag_test rosbag turtlesim topic_tools roscpp rospy
cd rosbag_test
mkdir launch
touch launch/start_cpp_record.launch src/bag_record.cpp
(2)编写bag_record.cpp
#include <ros/ros.h>
#include <rosbag/bag.h>
#include <ctime>
#include <iomanip>
// topic_tools可以让使用者在不知道topic具体消息类型的情况下,订阅并存储消息
#include <topic_tools/shape_shifter.h>
// 一个开源的,小型C++命令行解析工具:https://github.com/jarro2783/cxxopts
#include "cxxopts.hpp"
// bag的write接口,需要传入三个参数,其中消息类型是通用的;
// 这里需要注意的是,spin()是串行调用这个通用的回调函数,因此不存在并发问题,不用特殊保护!
void genericCallback(const topic_tools::ShapeShifter::ConstPtr& msg, rosbag::Bag* bag, const std::string& topic_name) {
bag->write(topic_name, ros::Time::now(), *msg);
}
int main(int argc, char ** argv) {
ros::init(argc, argv, "bag_record");
ros::NodeHandle nh;
// 通过参数可以看出这个bag_record的功能:支持指定输出的bag名;支持录制指定的topic;支持录制所有活跃的topic
cxxopts::Options options(argv[0], "parse cmd line");
options.add_options()
("O,output", "Name of the bag", cxxopts::value<std::string>())
("t,topic", "topic list", cxxopts::value<std::vector<std::string>>())
("a,all", "all topic")
("h,help", "show help");
auto result = options.parse(argc, argv);
if (result.count("help")) {
ROS_INFO("%s", options.help().c_str());
return 0;
}
// -t 和 -a 必须要有一个
if (!result.count("topic") && !result.count("all")) {
ROS_ERROR("please specify topic using -t or -a");
return -1;
}
// 如果不用-O指定bag名,则默认以格式化的时间戳命名
std::time_t current_time = std::time(nullptr);
std::tm* time_info = std::localtime(¤t_time);
char buffer[50];
std::strftime(buffer, sizeof(buffer), "%Y-%m-%d-%H-%M-%S", time_info);
std::string bag_name = "./" + std::string(buffer) + ".bag";
if (result.count("output")) {
bag_name = result["output"].as<std::string>();
}
// 如果 -a 和 -t 同时出现,则以 -a 为准
std::vector<std::string> topic_list;
if (result.count("all")) {
ros::master::V_TopicInfo topic_infos;
// 这个接口可以从master那里获取当前活跃的topic
if (ros::master::getTopics(topic_infos)) {
for (const auto & topic_info : topic_infos) {
topic_list.push_back(topic_info.name);
}
}
} else if (result.count("topic")) {
topic_list = result["topic"].as<std::vector<std::string>>();
}
rosbag::Bag bag;
try {
bag.open(bag_name.c_str(), rosbag::bagmode::Write);
} catch (rosbag::BagException &e) {
ROS_ERROR("open rosbag failed: %s", e.what());
return -1;
}
// 使用 topic_tools 创建subscriber,并且一定不要忘了持久化,否则spin() 无法调用他们的回调函数!
std::vector<ros::Subscriber> sub_list;
for (auto & item : topic_list) {
ros::Subscriber sub = nh.subscribe<topic_tools::ShapeShifter>(item, 1000, std::bind(genericCallback, std::placeholders::_1, &bag, item));
sub_list.push_back(sub);
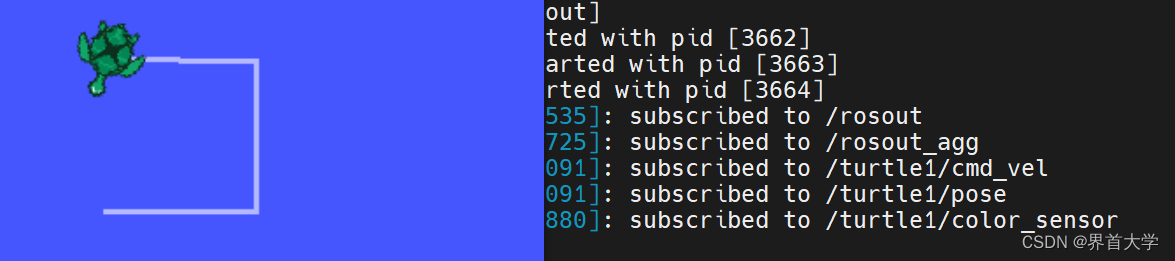
ROS_INFO("subscribed to %s", item.c_str());
}
ros::spin();
// 由于spin()不捕捉ctrl+c,所以这里的bag.close()没有被执行,但测试发现,并没有什么问题
bag.close();
return 0;
}
(3)编写start_cpp_record.launch
<launch>
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
required="true"
/>
<node
pkg="turtlesim"
type="draw_square"
name="draw_square"
required="true"
/>
// 等5秒再启动record,否则另外两个节点没起来,record看不到topic
<node
pkg="rosbag_test"
type="rosbag_test_record"
name="bag_record"
args="-O /home/ycao/Study/ros_noetic/bag_dir/square_1.bag -a"
output="screen"
launch-prefix="bash -c 'sleep 5; $0 $@'"
/>
</launch>
(4)编译和运行(由于四个样例都在 rosbag_test 包里,因此最后一个样例再把CmakeLists放上来)
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
roslaunch rosbag_test start_cpp_record.launch
2.2.2 C++查看包样例
(1)创建并编写bag_echo.cpp
cd ~/catkin_ws/src/cpp/rosbag_test
touch src/bag_echo.cpp
bag_echo.cpp
#include <ros/ros.h>
#include <rosbag/bag.h>
#include <rosbag/view.h>
// 为了能实现通用的bag内容查看工具,不依赖具体的msg类型,因此引入了这个开源库,其内部实现了反序列化功能
// https://github.com/facontidavide/ros_msg_parser
#include "ros_msg_parser/ros_parser.hpp"
// https://github.com/jarro2783/cxxopts
#include "cxxopts.hpp"
int main(int argc, char ** argv) {
// 由于查看rosbag是离线工具,因此不需要创建ros::NodeHandle句柄
ros::init(argc, argv, "bar_echo");
// 该工具支持查看指定topic内容,可以是一个,也可以是多个
cxxopts::Options options(argv[0], "parse cmd line");
options.add_options()
("b,bag", "Name of the bag", cxxopts::value<std::string>())
("t,topic", "topic list", cxxopts::value<std::vector<std::string>>())
("h,help", "show help");
auto result = options.parse(argc, argv);
if (result.count("help")) {
ROS_INFO("%s", options.help().c_str());
return 0;
}
if (!result.count("bag")) {
ROS_ERROR("please specify bag using -b");
return -1;
}
if (!result.count("topic")) {
ROS_ERROR("please specify a topic using -t");
return -1;
}
std::string bag_name;
if (result.count("bag")) {
bag_name = result["bag"].as<std::string>();
}
std::vector<std::string> topic_list;
if (result.count("topic")) {
topic_list = result["topic"].as<std::vector<std::string>>();
}
rosbag::Bag bag;
try {
bag.open(bag_name.c_str(), rosbag::bagmode::Read);
} catch (rosbag::BagException &e) {
ROS_ERROR("open rosbag failed: %s", e.what());
return -1;
}
// 从bag中提取特定topic的内容,如果不传入topic_query,则默认提取所有topic内容
rosbag::TopicQuery topic_query(topic_list);
rosbag::View view(bag, topic_query);
// 下面是完全参考ros_msg_parser的样例而来
ROS_INFO("starting to parse bag...");
RosMsgParser::ParsersCollection parsers;
for (const rosbag::ConnectionInfo* connection : view.getConnections()) {
const std::string& topic_name = connection->topic;
parsers.registerParser(topic_name, *connection);
}
for(const rosbag::MessageInstance& item : view) {
std::string topic_name = item.getTopic();
std::string data_type = item.getDataType();
std::string md5_val = item.getMD5Sum();
double time_sec = item.getTime().toSec();
std::string msg_def = item.getMessageDefinition();
ROS_INFO("--------- %s ----------\n", topic_name.c_str());
const auto deserialized_msg = parsers.deserialize(topic_name, item);
for (const auto& it : deserialized_msg->renamed_vals) {
const std::string& key = it.first;
const double value = it.second;
ROS_INFO(" %s = %f\n", key.c_str(), value);
}
for (const auto& it : deserialized_msg->flat_msg.name) {
const std::string& key = it.first.toStdString();
const std::string& value = it.second;
ROS_INFO(" %s = %s\n", key.c_str(), value.c_str());
}
}
return 0;
}
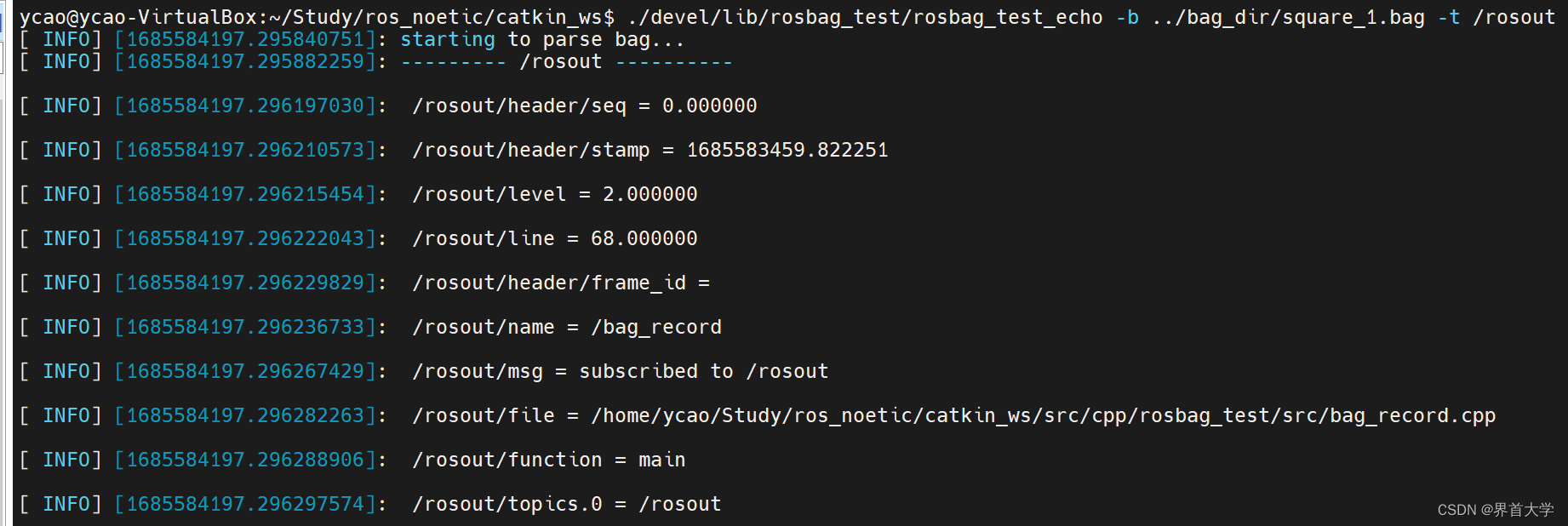
(3)编译和运行
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
./devel/lib/rosbag_test/rosbag_test_echo -b ../bag_dir/square_1.bag -t /rosout
2.2.3 C++截取包样例
(1)创建并编写bag_filter.cpp
cd ~/catkin_ws/src/cpp/rosbag_test
touch src/bag_filter.cpp
bag_filter.cpp
#include <ros/ros.h>
#include <rosbag/bag.h>
#include <rosbag/view.h>
// https://github.com/jarro2783/cxxopts
#include "cxxopts.hpp"
bool findTopic(const std::string topic, const std::vector<std::string>& topic_list) {
if (topic_list.empty()) {
return true;
}
for (auto & item : topic_list) {
if (topic == item) {
return true;
}
}
return false;
}
int main(int argc, char ** argv) {
ros::init(argc, argv, "bag_filter");
// 支持根据前后时间偏移量截取,也支持指定topic,如果不指定,默认是所有topic
cxxopts::Options options(argv[0], "parse cmd line");
options.add_options()
("i,input_bag", "Name of the input bag", cxxopts::value<std::string>())
("o,output_bag", "Name of the output bag", cxxopts::value<std::string>())
("s,start_offset", "offset time base start time", cxxopts::value<int>())
("e,end_offset", "offset time base end time", cxxopts::value<int>())
("t,topic", "topic list", cxxopts::value<std::vector<std::string>>())
("h,help", "show help");
auto result = options.parse(argc, argv);
if (result.count("help")) {
ROS_INFO("%s", options.help().c_str());
return 0;
}
if (!result.count("input_bag")) {
ROS_ERROR("please specify input bag using -i");
return -1;
}
if (!result.count("output_bag")) {
ROS_ERROR("please specify output bag using -o");
return -1;
}
std::string input_bag;
std::string output_bag;
int start_offset = 0;
int end_offset = 0;
std::vector<std::string> topic_list;
if (result.count("input_bag")) {
input_bag = result["input_bag"].as<std::string>();
}
if (result.count("output_bag")) {
output_bag = result["output_bag"].as<std::string>();
}
if (result.count("start_offset")) {
start_offset = result["start_offset"].as<int>();
}
if (result.count("end_offset")) {
end_offset = result["end_offset"].as<int>();
}
if (result.count("topic")) {
topic_list = result["topic"].as<std::vector<std::string>>();
}
rosbag::Bag ibag;
try {
ibag.open(input_bag.c_str(), rosbag::bagmode::Read);
} catch (rosbag::BagException& e) {
ROS_ERROR("open input bag failed: %s", e.what());
return -1;
}
rosbag::Bag obag;
try {
obag.open(output_bag.c_str(), rosbag::bagmode::Write);
} catch (rosbag::BagException& e) {
ROS_ERROR("open output bag failed: %s", e.what());
return -1;
}
rosbag::View view(ibag);
// 获取起止时间,利用findTopic()函数,决定是否提取处当前的topic
ros::Time begin_time = view.getBeginTime() + ros::Duration(start_offset, 0);
ros::Time end_time = view.getEndTime() - ros::Duration(end_offset, 0);
for (const auto& msg : view) {
if (msg.getTime() >= begin_time && msg.getTime() <= end_time) {
if (findTopic(msg.getTopic(), topic_list)) {
obag.write(msg.getTopic(), msg.getTime(), msg);
}
}
}
ibag.close();
obag.close();
ROS_INFO("successfully filtered bag : %s", output_bag.c_str());
return 0;
}
(3)编译和运行
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
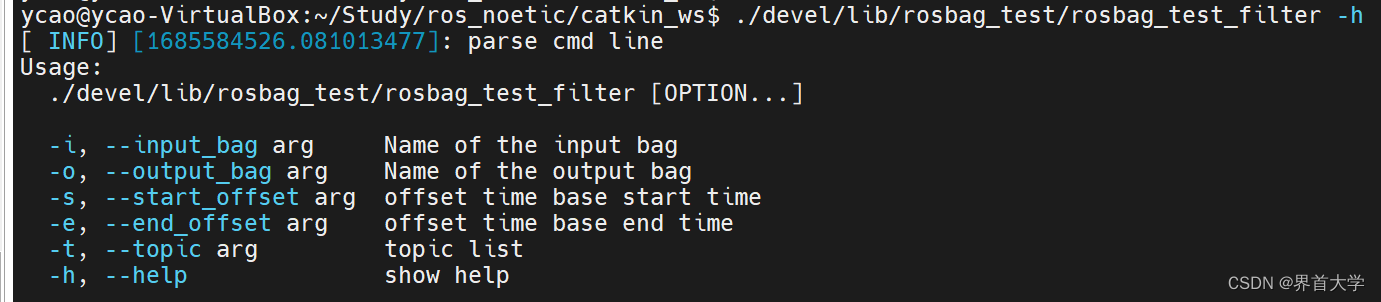
// 查看使用帮助
./devel/lib/rosbag_test/rosbag_test_filter -h
./devel/lib/rosbag_test/rosbag_test_filter -i ../bag_dir/square_1.bag -o ../bag_dir/square_1_filter.bag -s 5 -e 5 -t /turtle1/cmd_vel -t /turtle1/pose
2.2.4 C++包播放样例
(1)创建并编写bag_play.cpp
cd ~/catkin_ws/src/cpp/rosbag_test
touch src/bag_play.cpp
bag_play.cpp
#include <iostream>
#include <ros/ros.h>
#include <rosbag/bag.h>
#include <rosbag/view.h>
#include <topic_tools/shape_shifter.h>
// https://github.com/jarro2783/cxxopts
#include "cxxopts.hpp"
bool findTopic(const std::string topic, const std::vector<std::string>& topic_list) {
if (topic_list.empty()) {
return true;
}
for (auto & item : topic_list) {
if (topic == item) {
return true;
}
}
return false;
}
int main(int argc, char ** argv) {
ros::init(argc, argv, "bag_play");
ros::NodeHandle nh;
// 支持偏移起点播放,支持倍速播放,支持播放特定的topic,如果不指定,默认是所有topic
cxxopts::Options options(argv[0], "parse cmd line");
options.add_options()
("b,bag", "name of the bag", cxxopts::value<std::string>())
("s,start_offset", "sec offset of start time", cxxopts::value<int>())
("r,rate", "player rate", cxxopts::value<double>())
("t,topic", "topic list", cxxopts::value<std::vector<std::string>>())
("h,help", "show help");
auto result = options.parse(argc, argv);
if (result.count("help")) {
ROS_INFO("%s", options.help().c_str());
return 0;
}
if (!result.count("bag")) {
ROS_ERROR("please specify bag using -b");
return -1;
}
std::string bag_name;
int start_offset_sec = 0;
double play_delay_sec = 2.0;
double play_rate = 1.0;
std::vector<std::string> topic_list;
if (result.count("bag")) {
bag_name = result["bag"].as<std::string>();
}
if (result.count("start_offset")) {
start_offset_sec = result["start_offset"].as<int>();
}
if (result.count("rate")) {
play_rate = result["rate"].as<double>();
}
if (result.count("topic")) {
topic_list = result["topic"].as<std::vector<std::string>>();
}
rosbag::Bag bag;
try {
bag.open(bag_name.c_str(), rosbag::bagmode::Read);
} catch (rosbag::BagException& e) {
ROS_ERROR("open bag failed %s", e.what());
return -1;
}
rosbag::View view(bag);
// 利用这个view.getConnections()可以获取bag中一个msg的所有相关信息,除了消息内容
std::map<std::string, ros::Publisher> pubs;
const std::vector<const rosbag::ConnectionInfo*> connections = view.getConnections();
for (auto& item : connections) {
if (findTopic(item->topic, topic_list)) {
std::string topic_name = item->topic;
ROS_INFO("%s %s %s", topic_name.c_str(), item->datatype.c_str(), item->md5sum.c_str()/*, item->msg_def.c_str()*/);
ros::AdvertiseOptions opts;
opts.topic = topic_name;
opts.queue_size = 1000;
opts.md5sum = item->md5sum;
opts.datatype = item->datatype;
opts.message_definition = item->msg_def;
// 利用nh.advertise()这个构造函数,可以在不依赖具体消息类型的情况下,创建publisher
pubs[topic_name] = nh.advertise(opts);
}
}
// 播放之前,等一下,避免头部数据丢失
ROS_INFO("start play bag after %f sec...", play_delay_sec);
ros::Duration(0, (int)(play_delay_sec * 1e9)).sleep();
ros::Time begin_time = view.getBeginTime() + ros::Duration(start_offset_sec, 0);
ros::Duration stone_delta = ros::Time::now() - begin_time;
ros::Duration sum_du = ros::Duration();
for (const auto& msg : view) {
if (msg.getTime() >= begin_time) {
// 这里实现了倍速播放的逻辑,调试了好久!后面的python实现的bag_play.py,对此进行了优化,逻辑更清晰
ros::Duration msg_delta = ros::Duration(ros::Duration(msg.getTime() - begin_time).toSec() / play_rate);
while (begin_time + msg_delta + stone_delta > ros::Time::now()) {
ros::Duration du = ros::Duration(ros::Duration(msg.getTime() - begin_time).toSec()/play_rate) - sum_du;
sum_du += du;
du.sleep();
}
// 这里是实现了进度显示功能,核心是:\r
printf("[RUNNING] Bag Time: %.6f Duration: %.6f\r", msg.getTime().toSec(), ros::Duration(msg.getTime() - begin_time).toSec());
fflush(stdout);
// 使用topic_tools::ShapeShifter,可以在不知道msg类型的情况下,将bag里的msg播放出去,非常关键!
if (findTopic(msg.getTopic(), topic_list)) {
topic_tools::ShapeShifter::ConstPtr smsg = msg.instantiate<topic_tools::ShapeShifter>();
pubs[msg.getTopic()].publish(smsg);
}
}
if (!ros::ok()) {
break;
}
}
// 这句换行受不了,不然进度条留不住
printf("\n");
bag.close();
return 0;
}
(3)创建并编写start_cpp_play.launch
cd ~/catkin_ws/src/cpp/rosbag_test
touch launch/start_cpp_play.launch
start_cpp_play.launch
<launch>
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
required="true"
/>
<node
pkg="rosbag_test"
type="rosbag_test_play"
name="bag_play"
args="-b /home/ycao/Study/ros_noetic/bag_dir/square_1.bag -t /turtle1/cmd_vel"
output="screen"
/>
</launch>
(4)编写最终版CMakeLists.txt,这四个样例都是用的这个CMakeLists
cmake_minimum_required(VERSION 3.0.2)
project(rosbag_test)
find_package(catkin REQUIRED COMPONENTS
topic_tools
rosbag
roscpp
rospy
turtlesim
)
catkin_package()
include_directories(
include/rosbag_test
${
catkin_INCLUDE_DIRS}
thirdparty/ros_msg_parser/include
)
add_executable(${
PROJECT_NAME}_record src/bag_record.cpp)
add_executable(${
PROJECT_NAME}_echo src/bag_echo.cpp)
add_executable(${
PROJECT_NAME}_filter src/bag_filter.cpp)
add_executable(${
PROJECT_NAME}_play src/bag_play.cpp)
target_link_libraries(${
PROJECT_NAME}_record
${
catkin_LIBRARIES}
)
target_link_libraries(${
PROJECT_NAME}_echo
ros_msg_parser
${
catkin_LIBRARIES}
)
target_link_libraries(${
PROJECT_NAME}_filter
${
catkin_LIBRARIES}
)
target_link_libraries(${
PROJECT_NAME}_play
${
catkin_LIBRARIES}
)
(5)编译并运行
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
roslaunch rosbag_test start_cpp_play.launch


3 总结
本章的四个cpp样例是非常通用的,完全可以作为命令行工具的平替。下一章,我们将使用python重新实现这四个样例。本文中的例子放在了本人的github上: ros_src