ardupilot_gazebo仿真(二)
标签(空格分隔): 未分类
在模型中添加sensor
gezebo官网-sensor部分教程
gezebo官网-基础部分教程
以camera为例
<sensor name="camera" type="camera">
<pose>0 0 0 0 -1.57 0</pose>
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>15000</far>
</clip>
</camera>
<always_on>1</always_on>
<update_rate>10</update_rate>
<visualize>1</visualize>
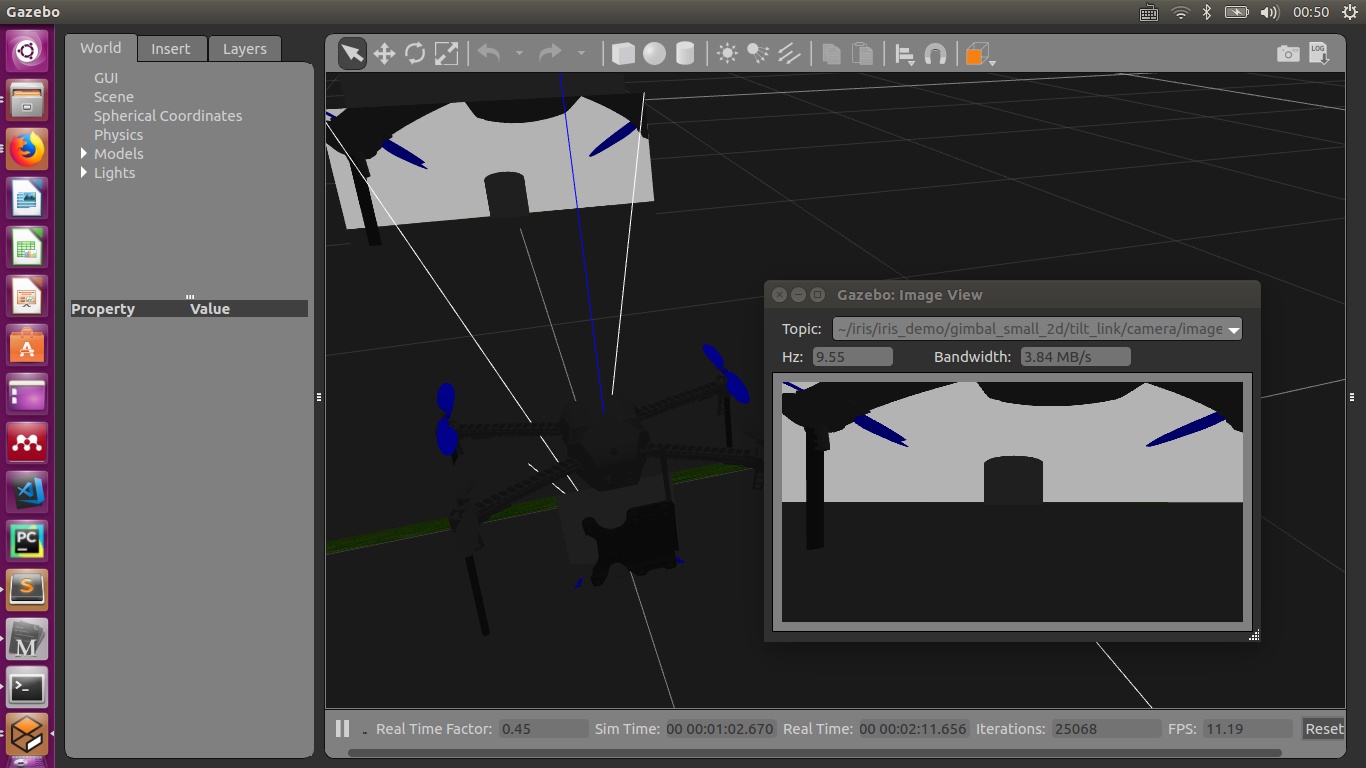
</sensor>其中pose是3个position\((x,y,z)\)和1个旋转矢量\((\theta,\phi,\psi)\)
在ardupilot_gazebo中ardupilot_gazebo/models_gazebo/gimbal_small_2d是云台的模型,其中包括了相机的模型。通过更改pose可以改变相机的朝向和位置。