URDF机器人建模
创建功能包
#进入工作空间
cd ~/catkin_ws/src/
#创建功能包
catkin_create_pkg mbot_description urdf xacro
在功能包目录下创建需要的文件
#进入功能包目录
cd ./catkin_ws/src/mbot_description
#存放机器人模型的URDF或xacro文件
mkdir urdf
#放置URDF中引用的模型渲染文件,机器人外观纹理
mkdir meshes
#保存相关启动文件
mkdir launch
#保存rviz的配置文件、功能包的配置文件
mkdir config
编辑launch文件
cd ~/catkin_ws/src/mbot_description/launch
sudo gedit display_mbot_base_urdf.launch
文件内容
<launch>
<!-- 加载的参数名字叫robot_description,具体内容是urdf相关模型的路径 -->
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面,保存每次打开之后的相关插件,保存到config文件夹下面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
创建urdf模型
创建小车底盘
cd ~/catkin_ws/src/mbot_description/urdf
sudo gedit mbot_base.urdf
文件内容
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<!-- link坐标位置,放在最中央 ,xyz单位是米,rpy单位是弧度-->
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<!-- 机器人的外观效果,使用圆柱体,高0.16,半径0.20 -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<!-- 通过rgba来描述颜色,颜色命名为yellow,a为1是不透明-->
</visual>
<!--visual指的是一些物理属性的标签 -->
</link>
</robot>
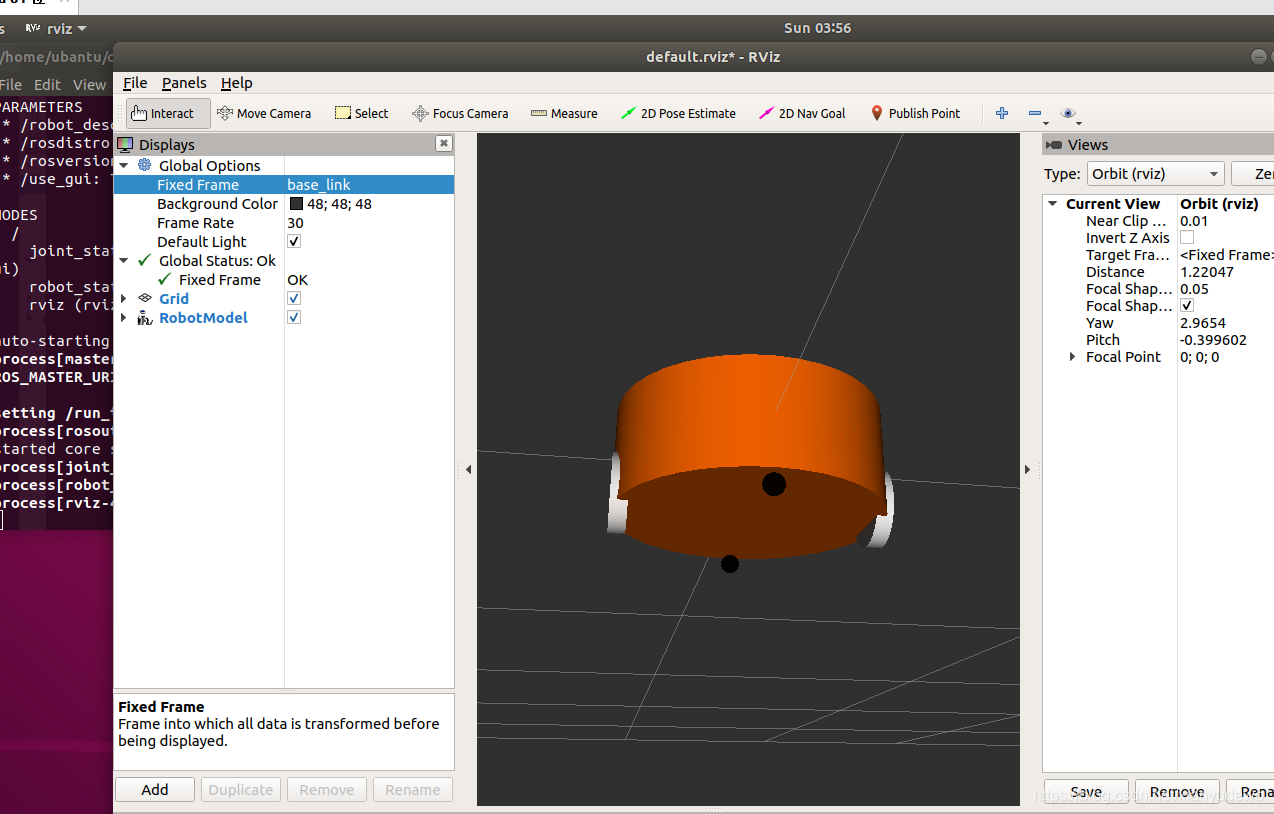
显示效果
roslaunch mbot_description display_mbot_base_urdf.launch
遇到问题
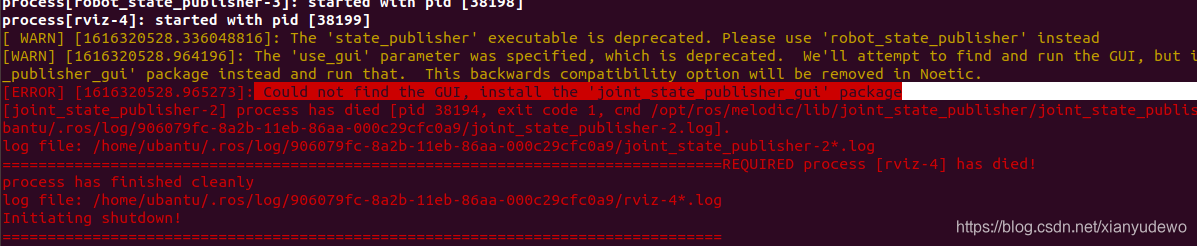
解决
注:本人ubantu18.04,使用的melodic,如其他版本修改对应的ros版本
sudo apt-get install ros-melodic-joint-state-publisher-gui
然后将launch文件中的joint_state_publisher用joint_state_publisher_gui全部替换
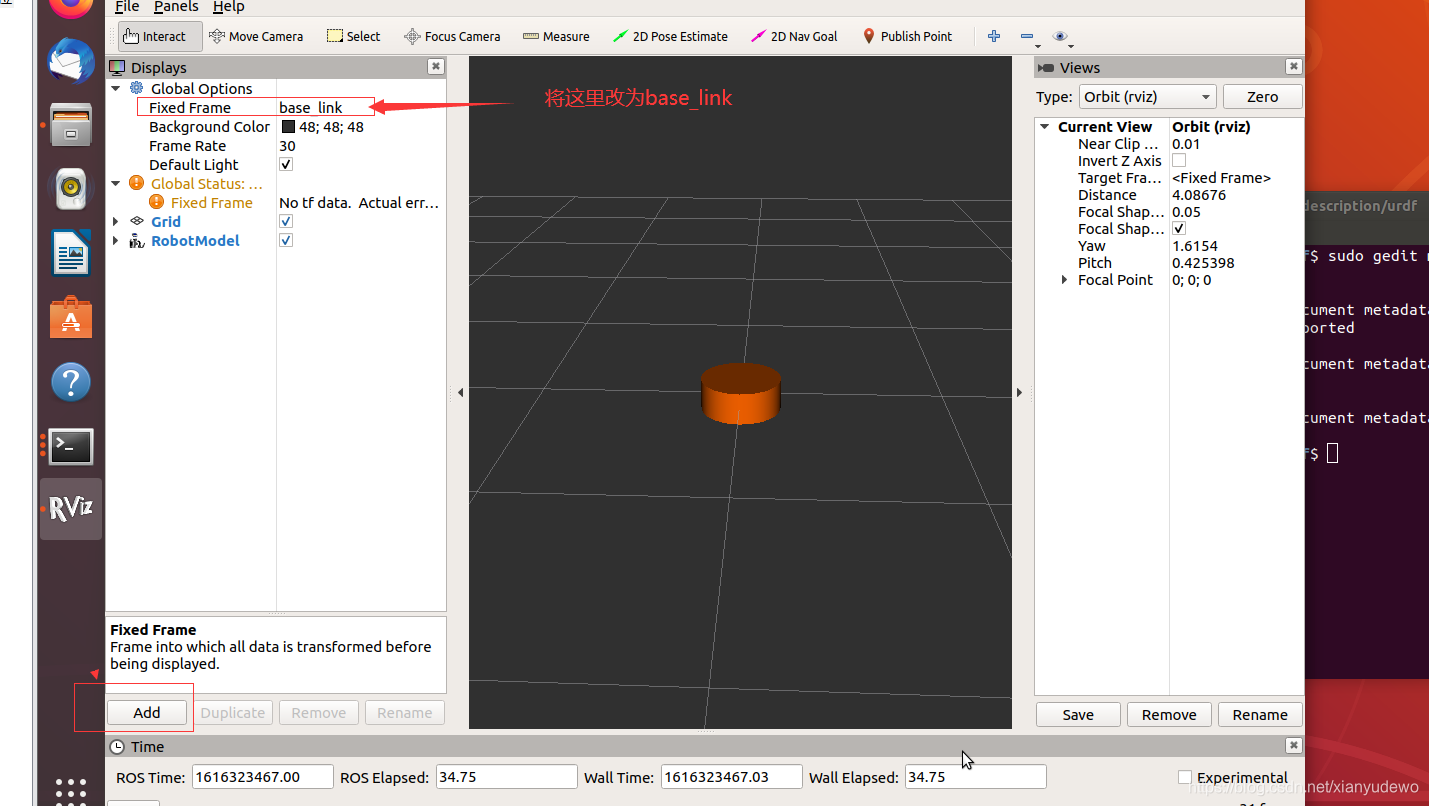
问题
打开rviz后不显示模型
解决
点击add添加RobotModel,将Fixed Frame 后面的选项改为base_link
创建左侧车轮
在上面文件中添加
sudo gedit mbot_base.urdf
<joint name="left_wheel_joint" type="continuous">
<!-- joint名字为left_wheel_joint,属性为continuous,即无限旋转-->
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<!-- 坐标位置,在base_link基础上,Y偏移0.19,z偏移-0.05-->
<parent link="base_link"/>
<child link="left_wheel_link"/>
<!-- 主关节:base_link,上面的圆柱形车体-->
<!-- 子关节:left_wheel_link,左轮-->
<!-- 主关节最后是一个,本代码是base_link-->
<axis xyz="0 1 0"/>
<!--left_wheel_link绕某一个轴做旋转,指定为Y轴 -->
</joint>
<!--joint用来连接两个link-->
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<!--左轮信息-->
右侧车轮
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<!-- 坐标位置,在base_link基础上,Y偏移-0.19,z偏移-0.05,与左轮正好相反-->
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
前后支撑轮
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
<!--用圆形轮子代替 -->
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
查看显示效果
roslaunch mbot_description display_mbot_base_urdf.launch
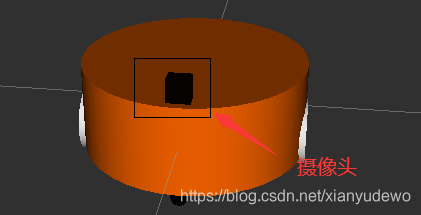
添加传感器
加入摄像头
cd ~/catkin_ws/src/mbot_description/urdf
sudo gedit mbot_base.urdf
mbot_with_camera.urdf
<joint name="camera_joint" type="fixed">
<origin xyz="0.17 0 0.10" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
<link name="camera_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.03 0.04 0.04" />
<!--外观是个盒子模拟成摄像头,长宽高分别是0.03 0.04 0.04-->
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
显示效果
roslaunch mbot_description display_mbot_base_urdf.launch
加入激光雷达
cd ~/catkin_ws/src/mbot_description/urdf
sudo gedit mbot_base.urdf
添加
<!--激光雷达配置内容-->
<joint name="laser_joint" type="fixed">
<origin xyz="0 0 0.105" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
<link name="laser_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
</link>
加入Kinect
cd ~/catkin_ws/src/mbot_description/urdf
sudo gedit mbot_base.urdf
内容
<!--Kinect配置-->
<joint name="laser_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
<!--直接加载Kinect的外观纹理描述文件-->
</geometry>
</visual>
</link>
注:这样一直添加代码,可能会出现错误,重叠之类的错误,最好就是将加一个传感器后加另一个传感器时把前一个传感器的代码部分删掉,应该会有更好的效果
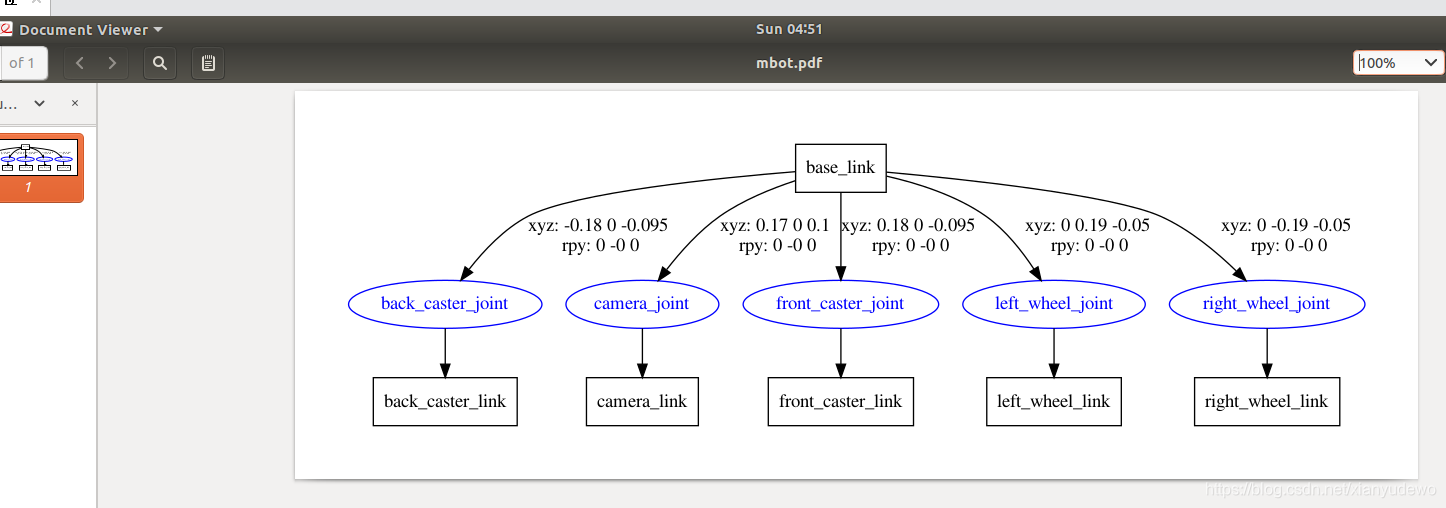
模型检查
urdf文件夹下执行 urdf_to_graphiz+要检查的urdf文件
urdf_to_graphiz mbot_base.urdf
效果