首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
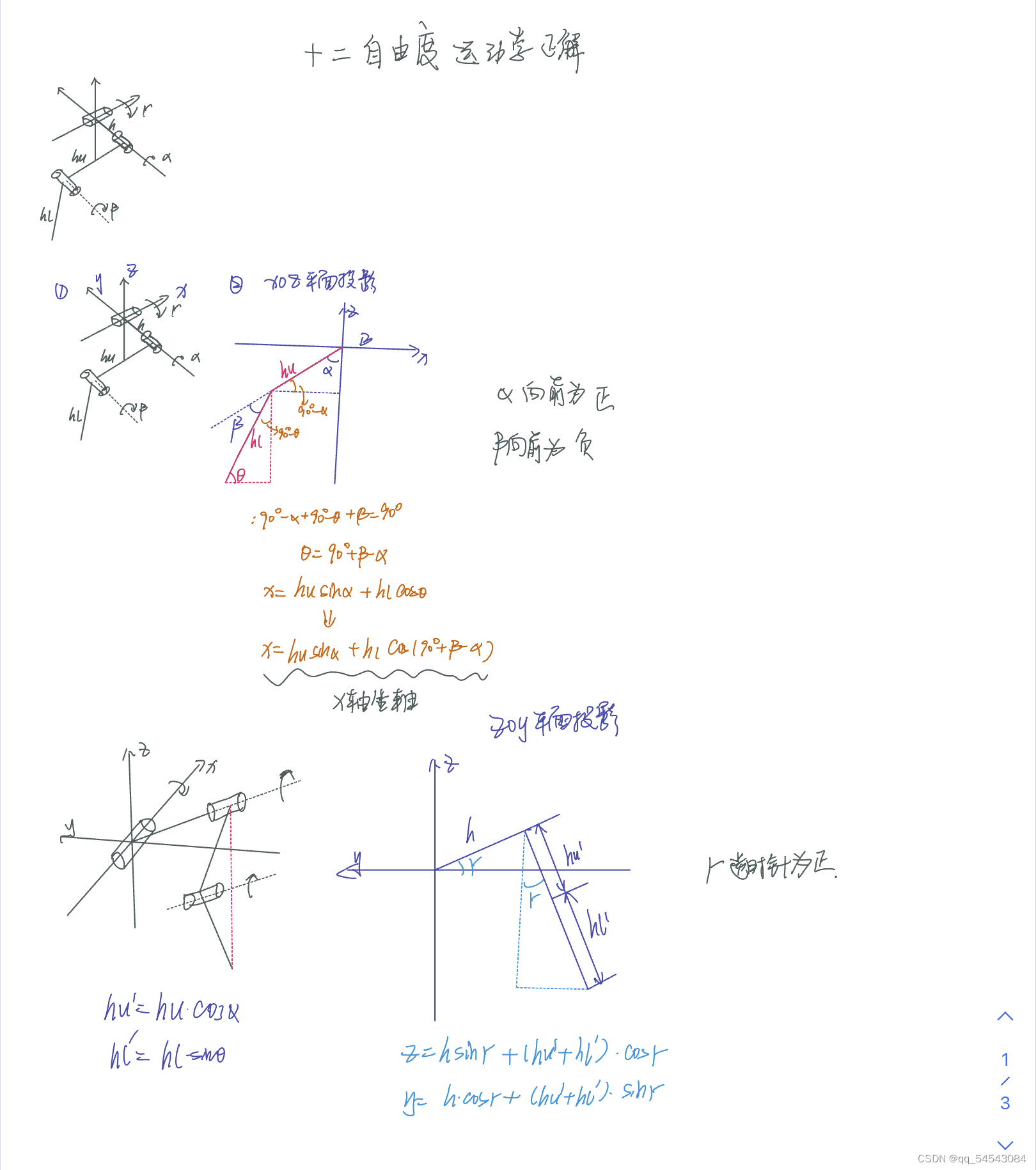
四足机器人学习笔记(十二自由度运动学正逆解)
企业开发
2023-12-18 00:53:21
阅读次数: 0
十二自由度运动学正解:
十二自由度运动学逆解:
猜你喜欢
转载自
blog.csdn.net/qq_54543084/article/details/125126864
四足机器人学习笔记(十二自由度运动学正逆解)
四足机器人学习笔记(八自由度运动学正解)
【机器人学】使用代数法求解3自由度拟人机械臂的逆运动学解
机器人学笔记(2)正运动学
【机器人学】冗余七自由度机械臂的解析解逆解算法
【机器人学】3-RUU-delta并联机器人正运动学、逆运动学和微分运动学
【Matlab 六自由度机器人】运动学逆解(附MATLAB机器人逆解代码)
【机器人学】基于PoE模型的串联机械臂UR5的正运动学、微分运动学和逆运动学
机器人学基础(1)-位置运动学-正运动学、逆运动学方程建立及其求解
斯坦福四足机器人运动学逆解(笔记4/作业4)
实例10:四足机器人运动学逆解可视化与实践
scara机器人运动学正逆解
【机器人学】使用解析法求解6轴机械臂的逆运动学解
机器人学笔记之——操作臂运动学:操作臂运动学
六自由度机器人(机械臂)运动学建模及运动规划系列(四)——轨迹规划
机器人学笔记之——操作臂逆运动学:代数解法和几何解法
【现代机器人学】基于指数积的机械臂正运动学
工业机器人运动学与Matlab正逆解算法学习笔记(用心总结一文全会)(四)——雅可比矩阵
【现代机器人学】基于指数积的机械臂逆运动学
Matlab RoboticToolBox(一)Link参数、三自由度/四自由度逆运动学
机器人学笔记之——操作臂运动学:机器人运动学问题举例
机器人学中常用的运动学模型
【Matlab 六自由度机器人】关于机器人运动学反解的有关问题
机器人学笔记之——操作臂运动学:关于连杆连接的描述
机器人学笔记之——操作臂运动学:连杆描述
机器人学之运动学(一):运动学描述基础
【Matlab 六自由度机器人】运动学正解(附MATLAB机器人正解完整代码)
四足机器人学习笔记(足端轨迹规划)
六自由度机器人(机械臂)运动学建模及运动规划系列(三)——机器人建模及运动学分析的Matlab仿真
工业机器人运动学与Matlab正逆解算法学习笔记(用心总结一文全会)(二)
今日推荐
《美国对全球网络空间安全与发展的威胁和破坏》报告发布
火速冲上 GitHub 热榜 —— 开源编程语言、框架哪有这么可爱?
北京人形机器人创新中心发布全球首个纯电驱拟人奔跑的全尺寸人形机器人“天工”
LFOSSA 源来如此公开课 | 掌握云原生未来:CNCF 认证全面攻略与备考秘籍
周排行
循环神经网络(rnn)讲解
Tigao教程四:单独的关节运动
金蝶K3WISE15.0-注册套打教程
如何在Mac上配置Kubernetes
Android应用结束自身进程的方法
SpringMVC学习 十三 拦截器栈
中国驻洛杉矶总领馆举行新春招待会
HttpClient get post 发送
11 - three.js 笔记 - 绘制三维字体模型
Mysql递归获取某个父节点下面的所有子节点和子节点上的所有父节点
每日归档
更多
2024-05-01(4)
2024-04-30(1)
2024-04-29(40)
2024-04-28(0)
2024-04-27(56)
2024-04-26(39)
2024-04-25(22)
2024-04-24(36)
2024-04-23(26)
2024-04-22(39)