本博客内容参考台湾大学_林沛群教授_机器人学的课程内容
1.相对运动关系的描述方法
假设有现在这样的一个情景,从左到右有三个转轴,转轴本身可以转动,也可以沿着轴线上下平动,那么我们如何描述其中的运动学关系及其位置关系呢?

1.1两个转轴
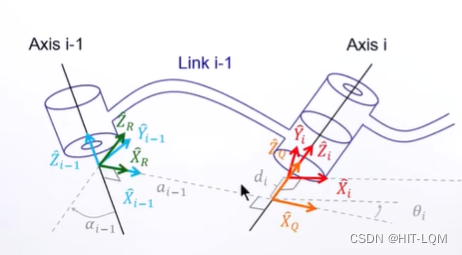
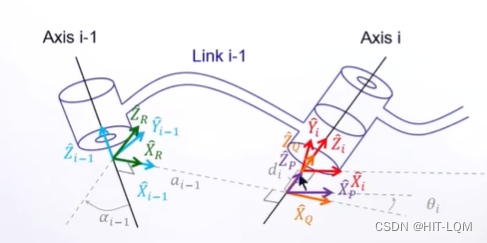
假设现在有两个转轴,即Axis i-1和Axis i,那么我们只需要两个量即可描述其相对位置。由于两个方向向量之间有且仅有一条公垂线段a i-1,并且我们可以将两个方向向量沿着公垂线段平移,将所形成的夹角定义为α i-1,可以看到,仅需要这两个量就可以描述其相对位置
1.2三个转轴
假设现在有三个转轴,那么上述的办法是行不通的,我们需要在此基础上增加两个量,分别是Axis i与Axis i+1的公垂线在Axis i上的垂足到Axis i-1在Axis i上的垂足之间的距离d i,以及两个公垂线之间的夹角θ i。不难发现,单纯的机械臂的转动和平动只会引起一个量的变化,如上图所示,转动会改变θ,平动则会改变d。
2.在杆件上建立坐标系
2.1一般情况

在这种情况下,我们将沿转轴向上的方向设置为Z轴,将沿着公垂线指向下一个杆件的方向设置为X轴,通过右手法则来确定Y轴的位置并建立坐标系。
还有一种很特殊的情况,那就是 两个Z轴不是异面的,如下图所示:

这种情况下,我们将两个Z轴方向向量的法向量设为X轴。
2.2地杆——第一个固定不动的杆件
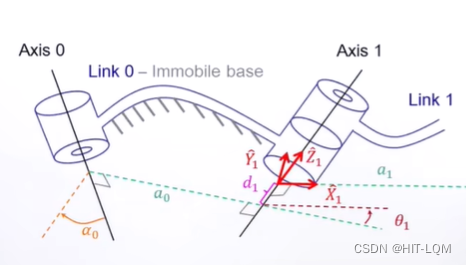
为了简化,可以将地杆的各个轴的方向与下一个保持一致,但是坐标中心要放在距离Axis 1位置d1的地方。
2.3最后一个杆件
左后一个杆件的X与上一个的X方向保持一致。
小结:DH表示法

3.杆件之间的位姿变换矩阵
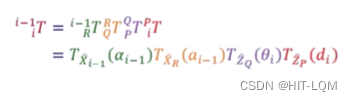
假设我们现在知道在第i个杆件坐标系下,P点的坐标为P,那么我们需要求出一个位姿变化矩阵,将其进一步还原到第i-1个杆件坐标系下的坐标。这个问题等价于我们已知α、a、d、θ四个量来求解位姿变换矩阵。
这四个量是有先后顺序的:
1.转动α角

2.沿着X的方向平移a
3.转动θ角
4.沿Z轴方向向上平移d
上述的表达式为:

等价于:
例1:
DH Table

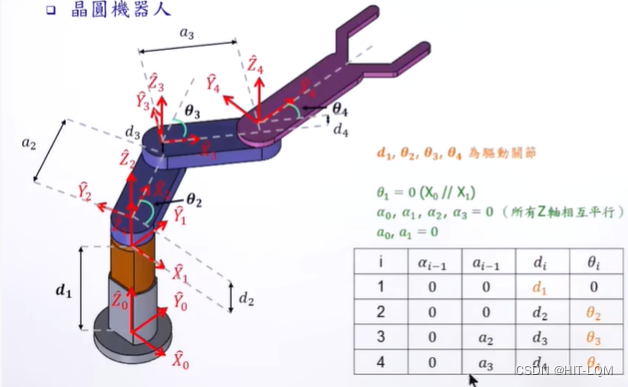
晶圆机器人
SCARA机器人

4.顺向运动学

以右侧的机械手臂为例,它的驱动为θ1,θ2,θ3,顺向运动学意味着当这三个角度确定时,我们可以计算出世界坐标系下P点的位置;而逆运动学恰好相反,当我们知道P在世界坐标系下的坐标后,我们需要确定这三个角度到底是多少,来驱动手臂到达目标位置。
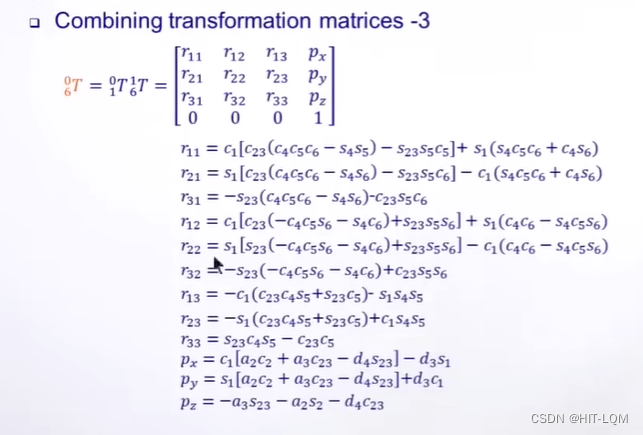
例:六自由度机械手臂