概述
STDN是收录于CVPR 2018的一篇目标检测论文,提出STDN网络用于提升多尺度目标的检测效果。要点包括:(1)使用DenseNet-169作为基础网络提取特征;(2)提出Scale-transfer Layer,在几乎不增加参数量和计算量的情况下生成大尺度的feature map。
STDN介绍
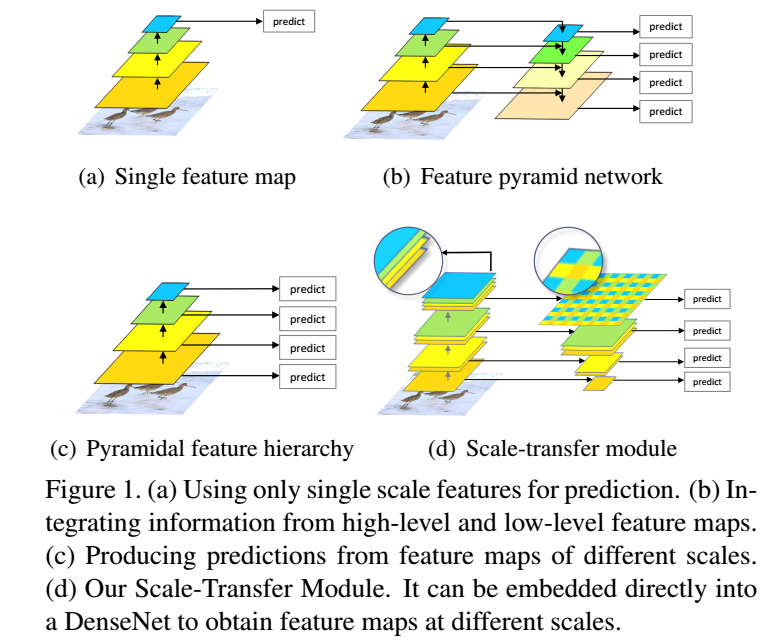
Figure 1回顾了目标检测算法对feature map的利用情况:
(a)是只使用单一尺度的feature map进行检测,这种方法利用的特征层较少,检测效果一般,代表性的算法如Faster RCNN;
(b)是FPN的做法,将不同尺度的feature map自顶向下进行融合,并基于融合后的不同尺度的feature map分别进行检测,对小目标的检测效果提升明显,构建特征金字塔的方式可以充分利用多个层次的feature map信息,但是需要添加一些额外的网络层,增加了计算量和时间;
(c)是SSD算法的做法,对不同尺度的feature map分别检测,虽然浅层专用于小目标的目标检测,但是由于没有使用到高层的语义信息,所以对小目标的检测效果一般;
(d)是本文的做法,检测方式类似于SSD,但是通过基础网络DenseNet将高低层特征融合,因此可以达到类似FPN的效果。
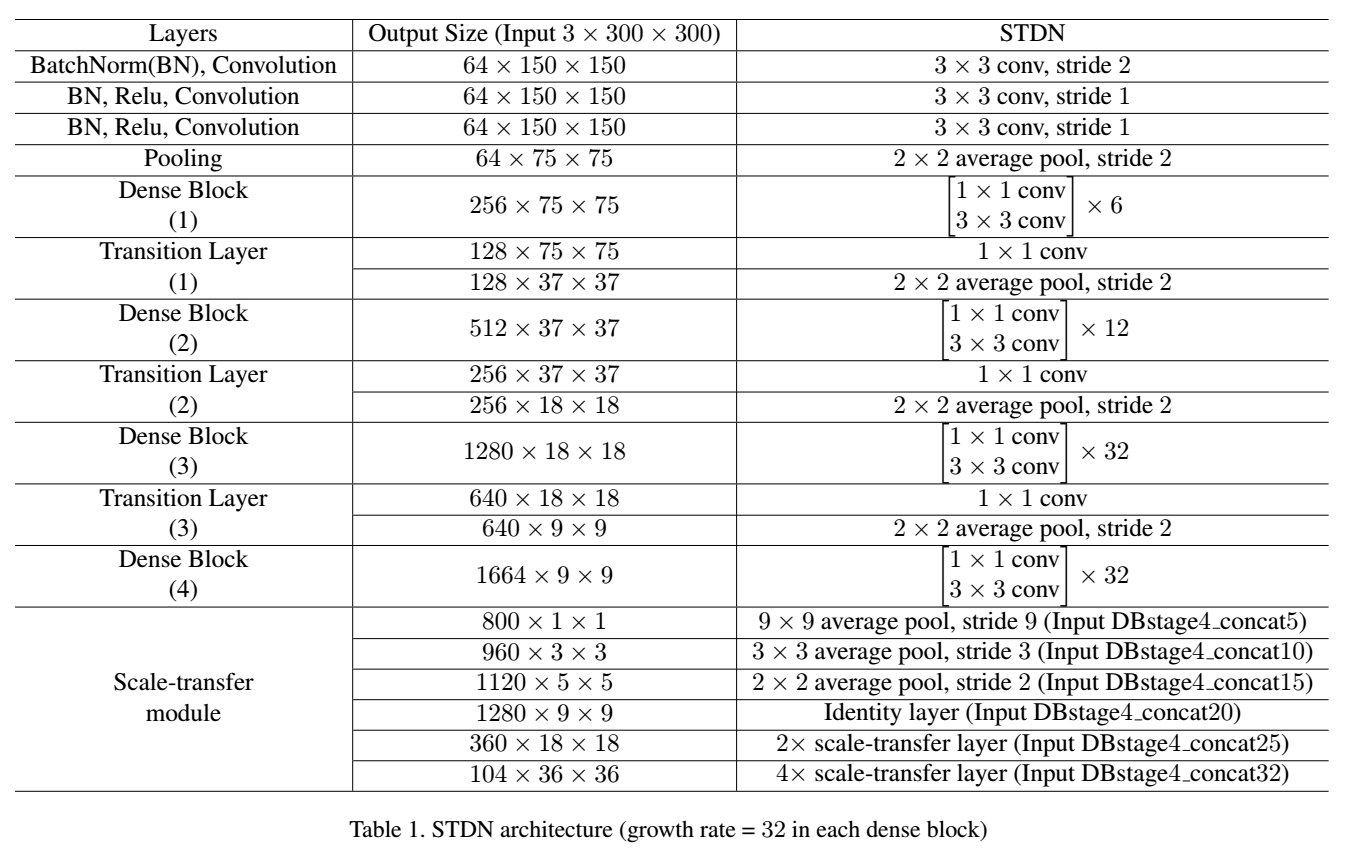
网络结构如下图所示,可以看做是SSD的一个改进版,将原SSD中基础网络VGG替换为DenseNet-169,通过DenseNet提取特征在最后一个Dense Block获得一系列9*9大小的feature map,然后通过Scale-transfer Module对feature map进行放大或缩小。最后分别对不同尺度的feature map做目标检测。

各层的结构如表3所示,论文所用的DenseNet对原DenseNet的输入层进行了调整,具体为:将7*7卷积层(stride=2)和其后的3*3 max pooling层(stride=2,stride=1,stride=1)替换为3个3*3卷积层(stride=2)和1个2*2 mean pooling层(stride=2)。调整称为stem block。这样做提升了检测精度。
文中提出Scale-Transferrable Module(STM)用于进行feature map的尺度变换,具体为:
(1)获取小feature map :mean pooling
(2)获取大feature map:Scale-Transfer Layer(STL)
STL是利用多个通道的feature map来增大feature map尺寸,也就是压缩通道数增大map尺寸。
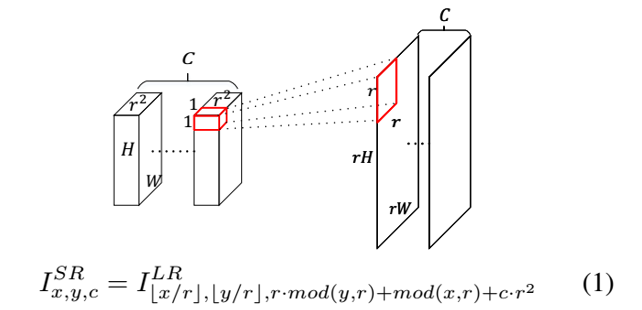
以网络的最后一个预测层为例,DenseNet-169的输出维度为9*9*1664,经过一个4X的scale-transfer后变为36*36*104。整个过程是像素值周期排列的过程,在此次变换中r=4,变换后的第一个通道上一个r*r像素块的像素值相当于是原来前r*r个通道上1*1的像素值的重新排列。
训练和损失函数
Anchor Box设置尺度同SSD,aspect ratio同DSSD,负样本挖掘、数据扩增、损失函数等等都跟SSD没差。
实验结果
(1)PASCAL VOC 2007
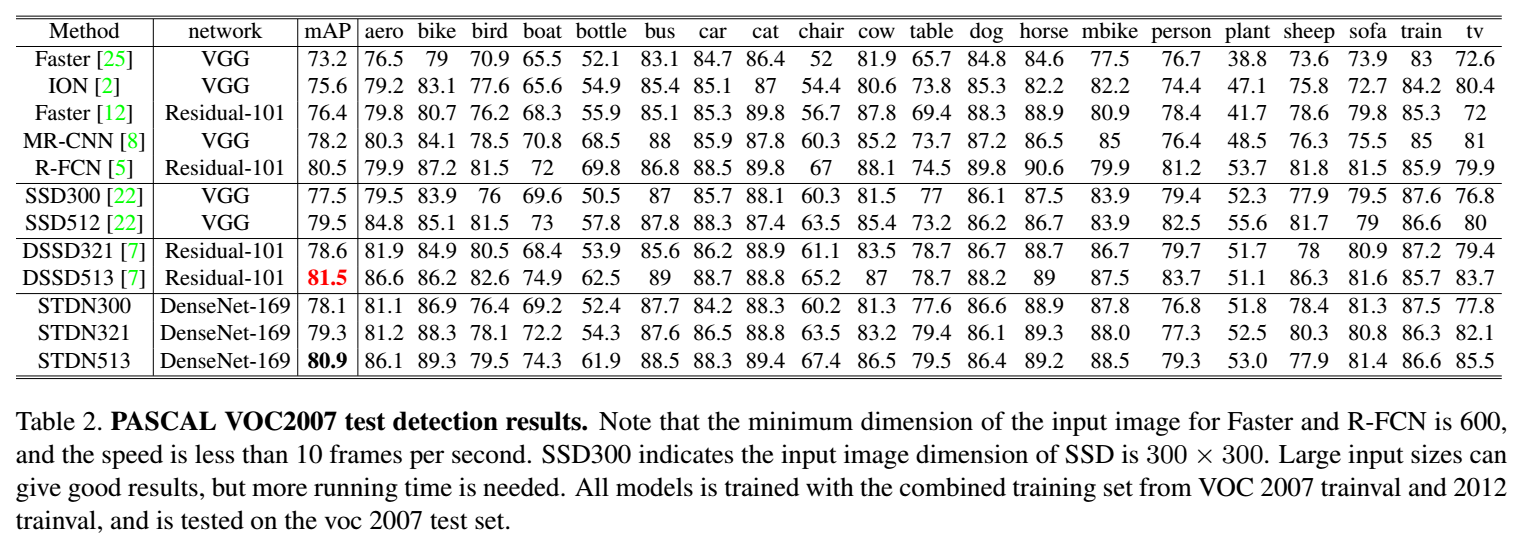
STDN相比SSD提升较为明显,与DSSD也有的一拼,作者认为STDN比DSSD稍差的原因是DSSD的基础网络Residual-101网络参数具有压制力(Residual-101有42M,而DenseNet-169只有14M)。
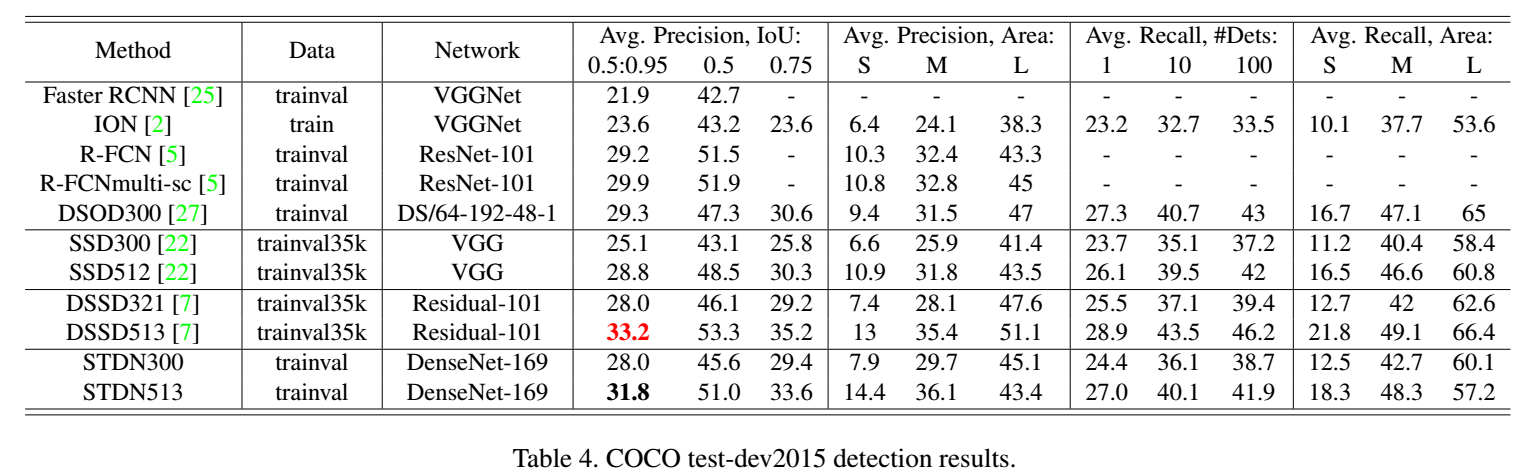
(2)COCO test-dev 2015
见表4。可以看出对中小型目标的检测效果优于其他主流算法,IoU 在0.5~0.95之间的目标检测效果也很不错,比Faster RCNN和R-FCN差(他们输入图像大,1000*600),比DSSD差(参数碾压),但是STDN不仅mAP高而且运行速度快(是DSSD的5倍多)。
主流算法的精度、速度对比如
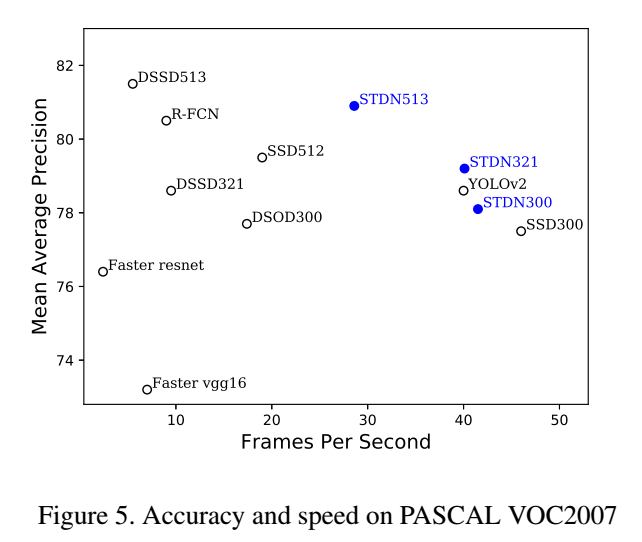
可见,STDN的表现很好,速度非常快,而且精度高,输入图像小,在取得较高准确率的同时又兼顾了速度。例如STDN321和513两个模型相比于Faster-RCNN、YOLOv2、SSD、DSSD等,首先在正确率上已具有相同或者更高的水平,但是在速度上优势很大,特别是对于准确率较高的R-FCN和DSSD513简直是碾压。