mini-batch gradient descent
定义
mini-batch实质上是将训练集切分为
T 部分,不再一次训练整个训练集而是
T 个子训练集依次训练。
训练过程中,
epoch 表示训练一次整个训练集,
batch 是指训练一次
Xt。
优点
如果一次只训练一个样本,除了迭代次数太多且失去了向量化的加速之外,在使用SGD进行优化时可能无法实现收敛。
如果一次训练了所有样本,消耗的内存过大,且难以处理。
使用
T̸=1orm$,虽然损失函数不会呈现一直下降,但是总体会有下降的趋势,趋于收敛。
若在训练过程中,画出的损失函数曲线波动幅度较大,说明batch的尺寸过小,应适当增大batch-size。
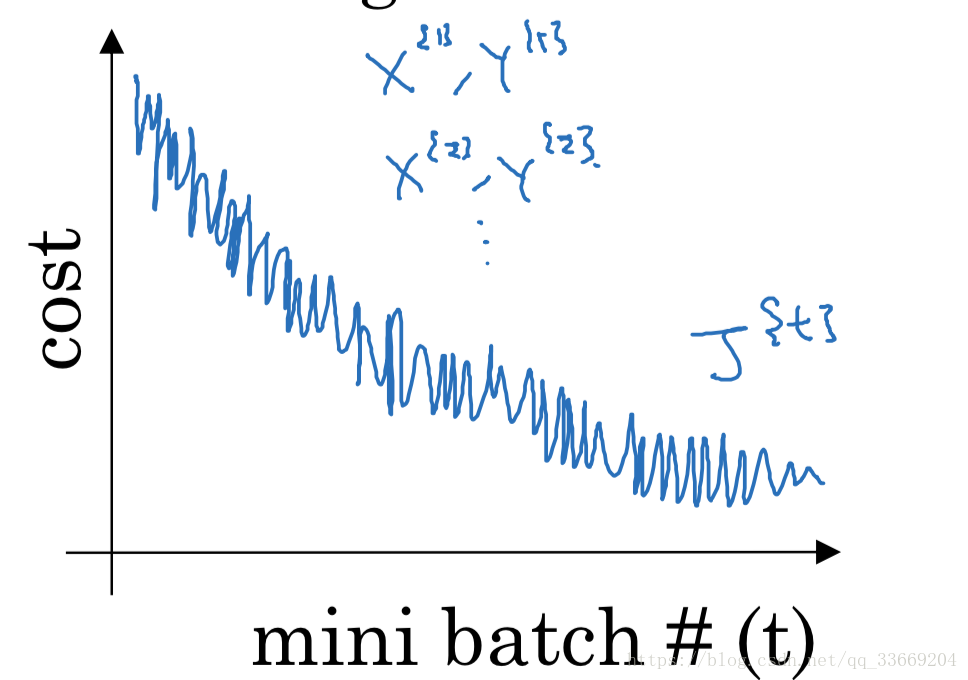
(图片来自吴恩达课件)
mini-batch size的取值通常为2的指数倍(如 64,128,256…),吴恩达课程中提出,如果训练集的大小
m 小于2000,那么可以直接训练。
Gradient Descent with momentum
基本思想
计算梯度的指数加权平均,并用该值来更新权重
流程
- 基于backwards计算
dW,
db
- 根据给定的
β,计算
vdW=βvdW+(1−β)dW
vdb=βvdb+(1−β)db
W=W−αvdW,b=b−αvdb
这里
β 通常设为 0.9。
应用指数加权平均时,本身应该有一个偏差修正的过程,但在实际应用时通常不引入该方法。
加权指数平均介绍
Vt=βVt−1+(1−β)θt
通常认为权重小于
e1 的值对最终结果的影响可以忽略不计,而
β1−β1≈e1,因此加权指数平均认为是
1−β1 个值的加权平均。
偏差修正:由于一开始的数据的预先变量较少,因此加权指数平均的效果较差,于是引入偏差修正,使预测更为准确。
1−βtVt
随着
t 的增大,偏差修正的影响越来越小。
直观理解
这里引用 monitor1370的观点:
- 当本次梯度下降的方向与上次更新量的方向相同时,上次的更新量能够对本次的搜索起到一个正向加速的作用。
- 当本次梯度下降的方向与上次更新量的方向相反时,上次的更新量能够对本次的搜索起到一个反向减速的作用。
RMSprop(Root Mean Square prop)
基本思想

在权重更新时,我们更希望权重能按照绿色线的方向逼近最优点,但实际上权重更多是按照蓝色线更新。假设垂直方向为
db,水平方向为
dW,那么我们只要减缓
db 的变化,增大
dW 的变化就可以更好的逼近最优点。
流程
- 基于backwards计算
dW,
db
-
SdW=βSdW+(1−β)d2W
Sdb=βSdb+(1−β)d2b由于
db 通常比
dW 大,所以
SdW 通常比
Sdb 小。
-
W=W−αSdW+ϵ
dW
b=b−αSdb+ϵ
db ,
ϵ确保除数不会是一个很小的数。由此,相对增大了横轴变化缩减了纵轴变化。
Adam optimization algorithm
- 基于 backward 计算
dW 和
db
-
vdW=β1vdW+(1−β1)dW
vdb=β1vdb+(1−β1)db
SdW=β2SdW+(1−β2)d2W
Sdb=β2Sdb+(1−β2)d2b
-
vdWcorrest=vdW/(1−β1t)
vdbcorrest=vdb/(1−β1t)
SdWcorrest=SdW/(1−β2t)
Sdbcorrest=Sdb/(1−β2t)
-
W=W−αSdWcorrest+ϵ
vdWcorrest
b=b−αSdbcorrest+ϵ
vdbcorrest
在该算法中,
β1 通常设为
0.9,
β2 通常设为
0.999,
ϵ 通常设为
10−8,
α 需要调节。
学习率衰减
原因
在运算初期,由于距离最优点较远,可以承受较大的学习率;在收敛过程中,学习率应慢慢衰减才能慢慢迭代到最优值处。
衰减方法
-
α=1+decay_rate∗epoch_num1α0
-
α=0.95epoch_numα0
-
α=epoch_num
kα0或
α=mini_batch_num
kα0,这里
k 为超参数。
- 离散下降学习速率,随着mini_batch_num 的增大,逐渐减小。
局部最优点
当网络参数较多的情况下,优化过程中不易困在局部最优点。在局部最优处的函数平稳,学习速率较慢,此时可以通过优化方法来加快学习速率。