ML Lecture 3-1: Gradient Descent
梯度下降法回顾
回顾机器学习的第三个步骤 ,我们需要从模型/函数集 中挑选最佳函数 ,这是一个求最优解的问题,需要利用损失函数。
在第二步中,我们定义的损失函数 是关于函数的函数:把函数 逐个代入损失函数 中,使得 越小的 就越好:
而“把函数
逐个代入损失函数
”这个过程太过繁琐,因此利用梯度下降法提高效率。

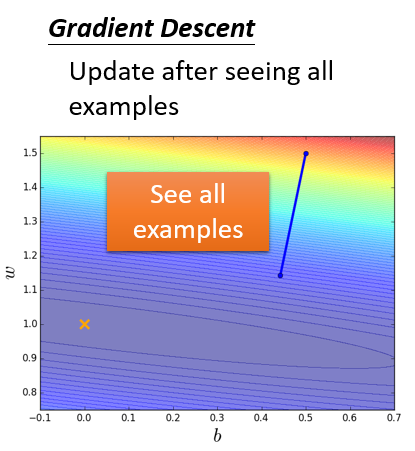
二参数的梯度下降过程
设参数集 ,包含2个参数。则梯度下降法的计算过程:
- 随机选取一组初始参数
:
- 分别计算 对 和 的偏导数 和 ,记为梯度向量
- 计算
和
,将参数从
更新至
:
即
- 计算
和
,将参数从
更新至
:
即
以此类推,不断更新参数:

参数更新轨迹见如下坐标图。横、纵坐标是不同的参数变量,梯度在图中理解为一种标量场。红色线代表梯度,它是一个向量,指向损失函数的等高线的法线方向。蓝色线是参数的更新路径,注意到蓝色线与红色线恰好是方向相反的。

Tip 1:调整学习率(Tuning your learning rates)
在前面的梯度下降过程中,学习率被设为一个常数 。事实上,学习率过大可能会导致无法收敛,学习率过小又会导致收敛极慢,以下图为例。
【注】:关于学习率过大、过小所带来的问题,在优化学习速率里有一个非常直观的练习。
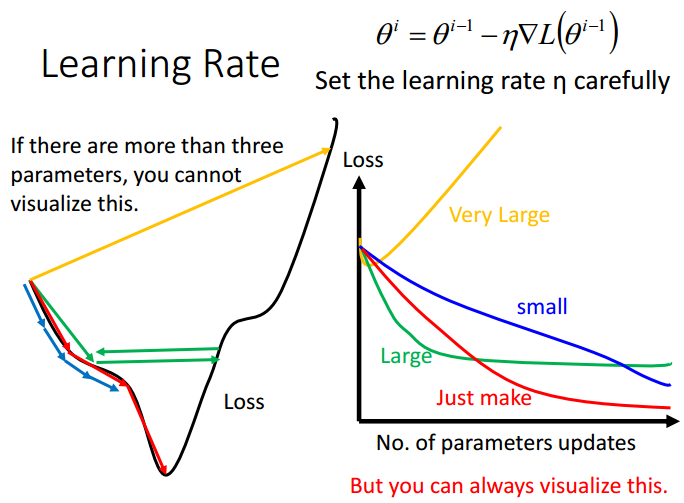
- 红色路径:设置适当的学习率,误差值会匀速下降,直至到达损失函数的最低点
- 蓝色路径:学习率太小,误差值下降十分缓慢,需要很长的时间才能到达损失函数的最低点
- 绿色路径:学习率较大,误差值先下降,降到一定程度后就卡住。由于更新步伐太大,只能在最低点左右震荡,始终无法抵达最低点,误差值不再发生变化
- 黄色路径:学习率非常大,参数直接跨过最低点,误差瞬间增大
只有当参数是一维或二维时,才能画出左边的路径图。在高维的参数空间里,无法作出路径图。但我们可以根据参数变化对损失函数值的影响,得到右边的图,观察每一次参数更新的误差变化情况,事实上做梯度下降是很有必要画出右图作参考的。接下来,考虑对学习率做一些适当的调整。
自适应学习率(Adaptive Learning Rate)之Adagrad
调整学习率的最基本、最简单的原则是:随着参数的更新,学习率应该逐渐减小。因为起始参数的位置离最低点往往比较远,所以一开始学习率应该设置大一点,加大更新步伐,加快接近目标。经过几次更新后,参数已经比较接近目标,这时就应该减小学习率,使得参数能够慢慢收敛到损失函数的最低点。
例如,把学习率设为关于迭代次数 的函数(Time-depend Learning Rate),记为 。随着迭代次数 的增大, 逐渐减小:
这样做仍然是不够的,对于不同的参数应该因材施教,最好是每一个参数都赋予一个合适的学习率。即在不同的迭代过程中,对不同的参数赋予不同的学习率。这就意味着,每一个参数在每一次迭代中的学习率,都是量身定做、独一无二的。
对于上述设想,最简单有效的算法实现是Adagrad。首先考虑最简单的一维参数。假设现在要在每一轮迭代中,对一维参数
设置不同的学习率,第
次更新得到的参数为
,损失函数
在
处的梯度记为
,则:

普通梯度下降(Vanilla Gradient Descent)的基本做法是,设置一个固定的学习率 ;或将学习率设为关于迭代次数 的函数: 。参数更新过程表示为:
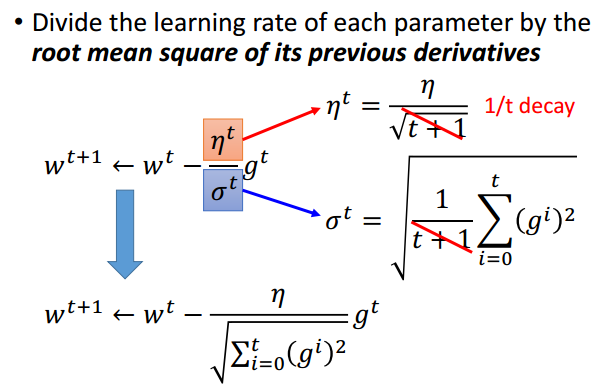
Adagrad算法调整学习率的基本思想是:在 的基础上,再除以过去所有导数值的均方根(Root Mean Square)。注意到,对于不同的参数、在不同的迭代过程中,计算出来的 都是不一样的,从而能够保证在多参数的情况下,每个参数都有各自的学习率。学习率表示为:其中, 。则参数更新过程可以表示为:
约掉 项后,Adagrad的参数更新过程表示为:
其中, 为常数。
Adagrad是一种使用了自适应学习率的梯度下降优化算法,参数的更新在整体上是越来越慢的,因为加入了Time-depend因素 。自适应包括了一系列的学习方法,Adagrad是其中最简单的一种,还有其他诸如Adadelta、Adam等。其中,Adam实操稍微比较复杂,但目前来说是比较稳定的算法。

深入理解Adagrad的更新步伐:从一维参数到多维参数
参数的更新同时取决于:学习率、梯度。

在普通梯度下降法中,学习率是一个常数 ,或是一个随迭代次数逐渐减小的数值 。一开始,梯度(斜率)比较大,参数处在陡峭的地方,更新步伐大。当逐渐接近最低点,梯度慢慢减小为0。总之,学习率 和梯度 互不干涉地逐渐减小。
而在Adagrad中,学习率和梯度虽然也是逐渐减小的,但针对具体某一轮迭代的参数,学习率和梯度之间是相互牵制而非互不干涉的。比如,对于第 次迭代,梯度为 ,学习率为 。显然,对于参数 ,它的梯度要是越大,那么学习率就越小。
为什么要这样设置学习率?或者说为什么Adagrad要以过去所有梯度的均方根 作为学习率的分母?如何从整体上理解Adagrad的更新步伐 ?
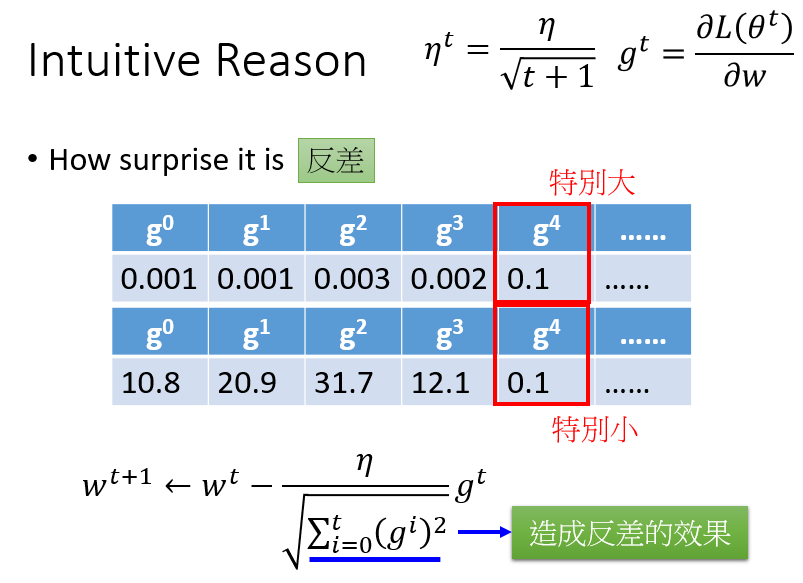
【直观上理解】定义学习率为 ,是为了考察第 次迭代梯度 的
反差(Surprise)程度。
如上图,第 次迭代得到的参数记为 ,对应的梯度为 。显然,上排的 对比之前的 到 显著增大,而下排的 对比之前的 到 显著减小。 为了反映从前面更新的一系列参数到下一个参数,梯度变化的反差有多大,所以除以 。
【从定义理解】考虑一个开口向上的二次损失函数 ,其中只包含一个参数 。易知,函数的最低点是 。作出该函数图(上),及一阶导数求绝对值后的图 (下):
假设现在从 出发做梯度下降,那么参数更新的理想步伐(best step)应该是: (即 与最小值之间的距离),意味着迭代一次就一步到位,到达最低点,找到最优参数。理想步伐整理后表示为:
其中,分子 恰好是 处的梯度,即 。这个关系印证了:在损失函数上随意选取一个出发点 做梯度下降,则出发点到最低点之间的距离,跟出发点处的梯度/斜率/一阶导数值是成正比的。梯度/斜率/一阶导数值越大,出发点离最低点就越远。注意到,上面的分析只涉及一个参数 。在多参数的情况下,“梯度/斜率/一阶导数值越大,离最低点越远”的论述就不一定成立了。
回到二参数 , 的梯度下降。如下损失函数等高线图:横坐标为 ,纵坐标为 。不同颜色的椭圆代表不同程度的损失值,越往内(蓝紫色部分)损失值越小。
首先,单独考察参数 和 对损失函数的影响:
- 对于 (蓝色线),在损失函数的等高线图上横向切一刀,可以看到不同等高线之间距离比较远,说明 的变化对损失函数造成的影响比较平缓,对应的曲线呈宽且浅的碗状。在损失函数上取 、 两点,由于 处的梯度大于 处的梯度,所以 点离最低点更远一些
- 对于 (绿色线),在损失函数的等高线图上纵向切一刀,可以看到不同等高线之间相距很近,说明 的变化对损失函数造成的影响比较快,对应的曲线呈尖而深的碗状。在损失函数上取 、 两点,由于 处的梯度大于 处的梯度,所以 点离最低点更远一些
在没有跨参数的情况下, 、 两个参数各自都符合“梯度/斜率/一阶导数值越大,离最低点越远”的论述。但是,综合考虑 和 的变化:
- 想象将 和 的损失函数曲线放在一个坐标轴上,比较 点和 点,会出现与上面不符的结论:显然 点处更陡峭,梯度更大,但 比 更靠近最低点
所以,在多参数的情况下,梯度/斜率/一阶导数值越大并不能说明距离最低点越远。
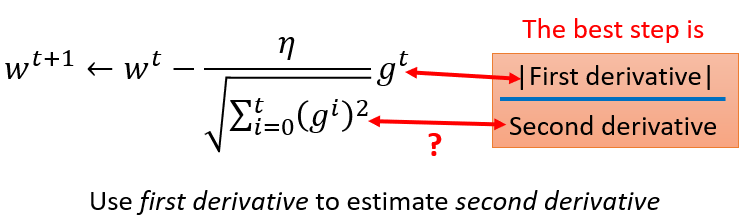
至此,再次明确我们的目标是,考察理想步伐:从出发点到最低点之间的距离,具有怎样的数学表达形式。
一维参数下,理想步伐为 ,分子 恰好是 处的一阶导数,它告诉我们这样一个信息:梯度/斜率/一阶导数值越大,离最低点越远。分母 恰好是二阶导数。
尽管多维参数情况下,“梯度/斜率/一阶导数值越大,离最低点越远”的结论不一定成立,但是却可以借鉴一维参数理想步伐的数学表达式,从而得到多维参数理想步伐的数学表达形式:正比于梯度/斜率/一阶导数,反比于二阶导数。或者说,梯度/斜率/一阶导数作为分子,二阶导数作为分母。二阶导数的本质是一阶导的变化率,从下图看出:
- 的二阶偏导是比较小的(横向看等高线图),因为 对应的损失函数图(右侧蓝色曲线)很平缓,各点处的梯度比较小
- 的二阶偏导是比较大的(纵向看等高线图),因为 对应的损失函数图(右侧绿色曲线)相对尖锐,各点处的梯度比较大
在二参数 , 的情况下,光比较点 、 的一阶偏导值:
来判断它们各自离最低点有多远,是不合理的。而考虑了二阶导数后,通过比较:虽然 的一阶偏导值比较小,但除以了一个同样比较小的二阶偏导值;而 的一阶偏导值比较大,但除以一个同样比较大的二阶偏导值,抵消了自身变化率的影响,这样才能真正反映当前位置与最低点之间的距离。
找到理想步伐(best step)的表达形式: ,这与Adagrad的更新步伐有什么关系?
注意到,Adagrad的更新步伐是:
其中,分子 是梯度/一阶导,而分母 恰好就是二阶导的近似替代。这个形式符合理想步伐(best step)的表达形式。
那么如何理解 作为二阶导的近似替代?
首先,简单损失函数的二阶导其实是可以直接计算的。但在参数量大、数据多的情况下,计算一阶导都比较耗时,计算二阶导的繁琐程度可想而知。而Adagrad提供的思路是:在没有增加任何额外运算的前提下,想办法利用一阶导估计二阶导,这样我们整个运算过程就只涉及一阶导的计算。
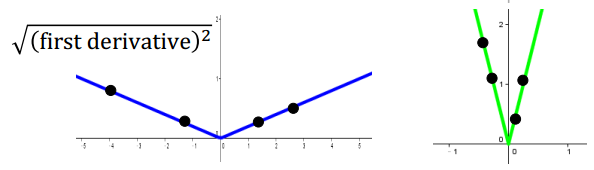
直观比较下面的损失函数图,左图平缓,每一个点的梯度小(不陡峭),梯度变化也比较慢,意味着二阶偏导较小;右图尖锐,每一个点的梯度大(陡峭),梯度变化快,意味着二阶偏导较大。
将对应的梯度/一阶导数图绘制如下。前面提到,二阶导数的本质是一阶导的变化率。在下面的图中,若随机抽取一个一阶导的样本点,是不能反映一阶导的变化情况的,即不能考察二阶导的大小。
但假如能抽取多个关于一阶导的样本点,就会发现:在左图比较平滑的损失函数里,各点处的一阶导数值普遍较小,一阶导数值之间的的变动也相对较小,从而二阶导较小;在右图比较尖锐的损失函数里,各点处的一阶导数值普遍较大,一阶导数值之间的的变动也相对较大,从而二阶导较大。
而Adagrad学习步伐的分母: 就可以视为随着迭代次数增加,不断增加对一阶导的采样,求其均方根,以此来考察二阶导的大小,所以可以作为二阶导的近似替代。






Tip 2:随机梯度下降(Stochastic Gradient Descent,SGD):加快训练

一般地,在线性回归的梯度下降中,损失函数为:
而随机梯度下降(Stochastic Gradient Descent,SGD)采取的方法是:每拿到一个样本,就针对这个样本更新一次参数,有多少个样本,参数就更新多少次。样本可以随机抽取,也可以按照顺序抽取。例如做深度学习的时候,损失函数曲线不是凸的,而是非常崎岖的,这时随机取样是比较好的。以第
个样本为例,介绍SGD过程:

- 记参数集 。选择初始参数
- 假设抽到第
个样本
,则基于样本
的损失函数(注意是单个样本的损失函数)为:
- 计算损失函数对各参数的偏导: 、 、 、…、 ,记为梯度向量
- 将初始参数 代入 ,得到
- 做一次参数更新:
- 再抽取一个样本,再更新一次参数。以此类推,假如一共有20个样本,参数就更新20次。虽然每一次更新的步伐可能比较小,且比较散乱,但相对于普通梯度下降需要一次性计算完所有样本的损失函数,随机梯度下降“见步行步”的做法收敛更快
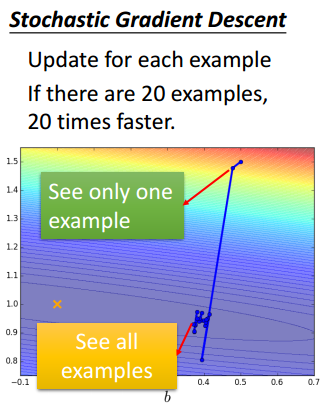
以上两种情况相比,梯度下降处理完20个样本的损失函数后,做了一次参数更新;而随机梯度下降同样处理了20个样本,并做了20次参数更新。
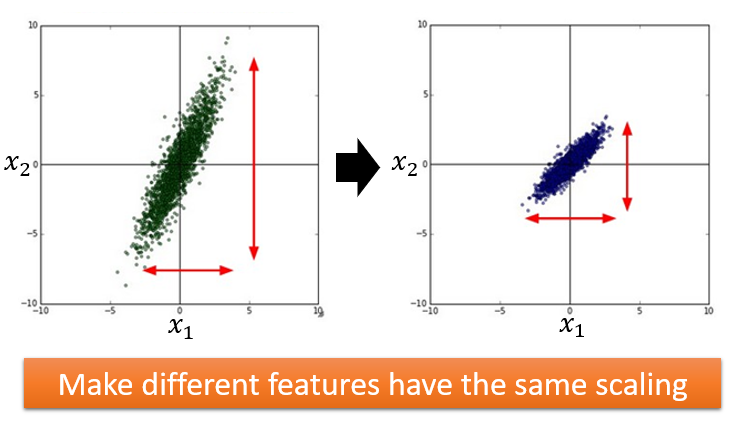
Tip 3:特征缩放(Feature Scaling)
可以理解为特征归一化。以预测pokemon进化后的CP值为例,回归任务:
输入特征为
、
,分别代表进化前的CP值、生命值。假如
和
的分布范围相差十分大,则应该做缩放(归一化),使二者的分布范围一致。
为什么要对特征做缩放?
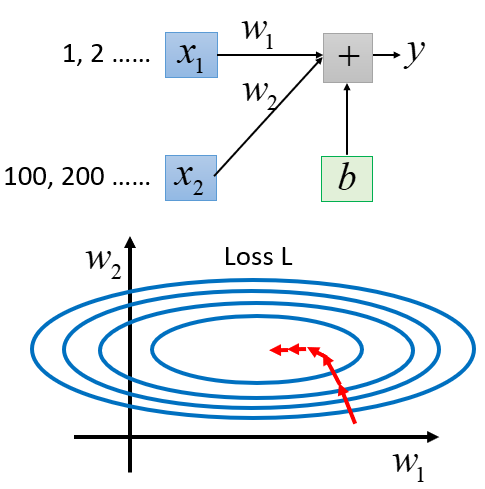
假设 的取值范围普遍比较小: ;而 的取值范围普遍比较大: 。这种取值差异无疑会带来影响:当 和 发生同样的变化,对 造成的影响是不同的。
- 显然, 变化时,由于 取值范围不大,所以最后的变动对 影响小,从而 对 的影响也小,因此损失函数对 的偏导是比较小的,误差曲面在 方向上(横向)是比较平滑的
- 而 变化时,由于 取值范围大,会给 带来很大的变化,所以 对 的影响比较大,因此损失函数对 的偏导是比较大的,误差曲面在 方向上(纵向)比较窄(敏感)
没有做特征归一化的情况下,误差曲面呈长椭圆形,更新参数通常比较困难,需要使用Adagrad算法才能到达最低点,因为在不同的方向上需要不同的学习率。并且,梯度下降的方向并不是直接朝着最低点走,而是沿着等高线的法线方向前进,长椭圆形的误差曲面意味着要绕许多弯路才能走到中间。
但如果能够把
和
的分布范围统一起来,使得
、
对
的影响一致,那么误差曲面就会呈现如下图。在这种情况下,无论从哪个起点出发,梯度下降的方向就是最低点的方向,参数更新更有效率。

如何对特征做缩放?
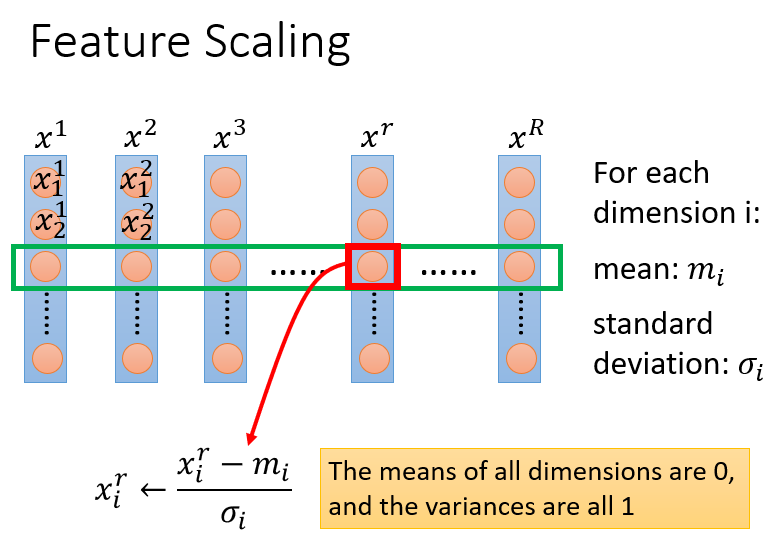
特征缩放方法有很多种,其中最常见的是正态标准化。过程如下:
假设 代表 个样本,每个样本对应一组特征值。则:
样本 的特征值为:
样本 的特征值为:
样本 的特征值为:求各特征的平均值 与标准差 :
特征 的平均值: ,标准差
特征 的平均值: ,标准差
特征 的平均值: ,标准差做标准化后,每个特征的取值服从标准正态分布 :