ML Lecture 3-1: Gradient Descent
梯度下降的理论基础
做梯度下降的时候,每一次迭代得到新参数,是否能保证损失函数也在不断减小?
即对于
θ0→θ1→...
,是否总是有
L(θ0)>L(θ1)>...
?
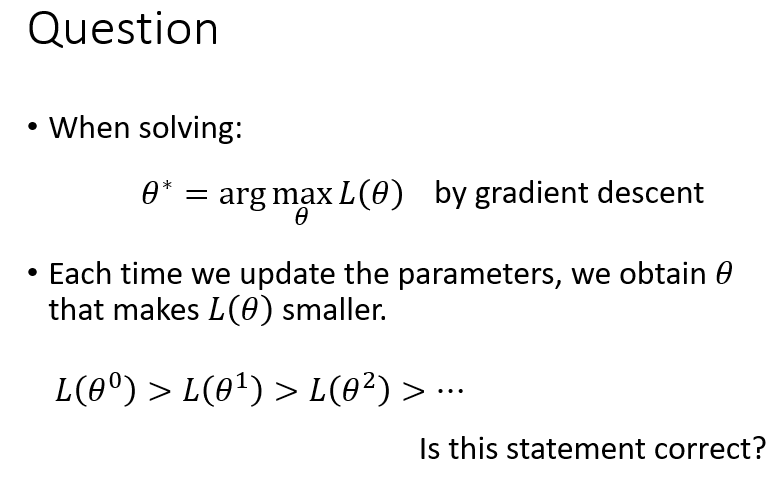
答案是否定的。在利用梯度下降更新参数的过程中,损失函数不一定总是下降,比如当学习率设置得太大,就会出现损失函数不降反增的情况。因此,了解梯度下降的工作原理,能帮助我们更快更好地寻找损失函数的最低点。
形式化推导
首先不考虑梯度下降。考察在求解最优化问题中:对于给定的整个损失函数,我们没有办法马上找到最低点。但是给定一个起始点
θ0
,以
θ0
为中心,划出一个直径为
d
的红色圆圈,我们可以很快寻找到这个圆圈范围内的损失函数最低点
θ1
,再将中心位置从
θ0
移动到
θ1
。然后以
θ1
为中心再划分一个范围,寻找最低点,并再次更新中心点,以此类推。
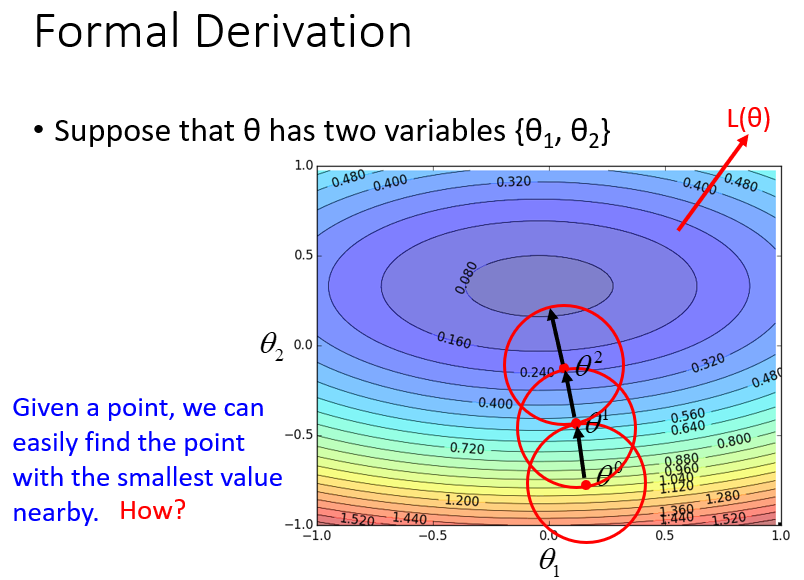
如何在红色圆圈范围内,找到使损失函数最小的参数?解决这个问题需要从泰勒级数出发。
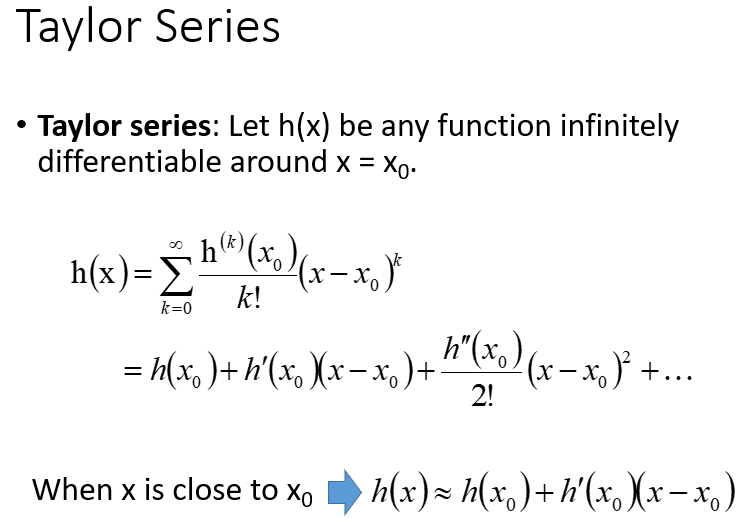
1. 一元函数的泰勒展开
泰勒级数是指:对于任意一个函数
h(x)
,如果函数在
x=x0
处无穷可微时,那么函数
h(x)
可以用无限项连加式来表示:
h(x)=∑k=0∞h(k)(x0)k!(x−x0)k=h(x0)+h′(x0)(x−x0)+h′′(x0)2!(x−x0)2+...
其中,
h(k)(x0)
表示函数
h
在点
x0
处的
k
阶导数。如果
x0=0
,那么这个级数又称为麦克劳林级数。当
x
非常接近
x0
时,
(x−x0)>(x−x0)2≫...
,则
h(x)
可以表示为:
h(x)≈h(x0)+h′(x0)(x−x0)
下图以正弦函数
h(x)=sin(x)
在点
x0=π4
为例,将
sin(x)
在
π4
处展开,表示成多项级数相加:
扫描二维码关注公众号,回复:
2625443 查看本文章

展开到
0
阶导时:
sin(x)=12√
,是一条水平线;
展开到
1
阶导时:
sin(x)=12√+x−π42√
,是一条斜率为正的直线;
展开到
2
阶导时:
sin(x)=12√+x−π42√−(x−π4)222√
,是一条曲线;
…
展开到高阶导时,曲线的形状会逐渐接近真实的
sin(x)
,如图中橙色线。
观察到:只考虑
1
阶导时,直线
12√+x−π42√
与
sin(x)
的真实曲线形状相差很远,但是两条线在
x=π4
附近的取值很相近。因为当
x→π4
时,
(x−π4)2,(x−π4)3...
等的值都很小,甚至可以忽略这些项,整个式子只留下
1
阶导的部分。

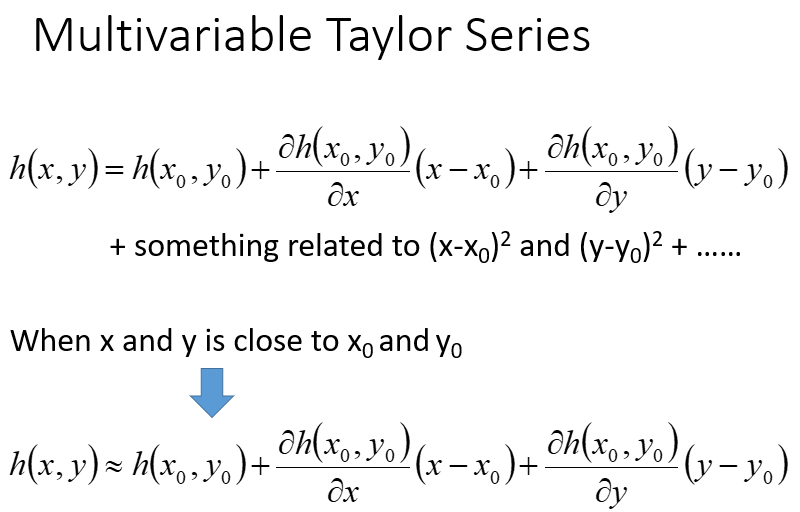
2. 二元函数的泰勒展开
以上情况只涉及到一个变量
x
,还有多元的情况。二元函数
h(x,y)
在点
(x0,y0)
处的泰勒公式展开式为:
h(x,y)=h(x0,y0)+h′x(x0,y0)(x−x0)+h′y(x0,y0)(y−y0)+...
其中
h′x(x0,y0)
表示函数
h
对
x
的偏导数在点
(x0,y0)
处的值,
h′y(x0,y0)
表示函数
h
对
y
的偏导数在点
(x0,y0)
处的值。当
(x,y)
非常接近
(x0,y0)
时,后面项的值非常小,可以忽略,于是
h(x,y)
可以表示为:
h(x,y)≈h(x0,y0)+h′x(x0,y0)(x−x0)+h′y(x0,y0)(y−y0)
泰勒展开与前面的形式化推导问题有什么关系?
假设损失函数是
L(θ)=L(θ1,θ2)
,在其等高线图上,初始点是
θ1=a,θ2=b
。以
(a,b)
为中心,以
d
为半径,划出一个红色圆圈范围。利用泰勒展开式,将损失函数在点
(a,b)
处展开:
L(θ)=L(θ1,θ2)≈L(a,b)+L′θ1(a,b)(θ1−a)+L′θ2(a,b)(θ2−b)
其中,
L(a,b)
表示损失函数在点
(a,b)
处的值,记为常数
s
;
L′θ1(a,b)
表示损失函数
L
对
θ1
的偏导在点
(a,b)
处的值,记为常数
u
;
L′θ2(a,b)
表示损失函数
L
对
θ2
的偏导在点
(a,b)
处的值,记为常数
v
。记
Δθ1=θ1−a
,
Δθ2=θ2−b
。则损失函数表示为:
L(θ)=L(θ1,θ2)≈s+u(θ1−a)+v(θ2−b)=s+uΔθ1+vΔθ2

有了损失函数的近似表达式、不等式约束条件后,我们的具体目标转化为:在
(Δθ1)2+(Δθ2)2≤d2
的不等式约束条件下,寻找最优的
Δθ1
、
Δθ2
,使损失函数
L=s+uΔθ1+vΔθ2
取值最小。

由于
s
是一个常数,所以只考虑不等式约束条件下
uΔθ1+vΔθ2
的最小化,这部分可以视为向量
(Δθ1,Δθ2)
和向量
(u,v)
做内积(点积)。
u
、
v
均是常数,应如何选择
Δθ1
、
Δθ2
使内积(点积)最小?
点积是内积的一种特殊形式,有代数、几何两种定义方式。
代数定义
两个向量
a→=[a1,a2,...,an]
和
b→=[b1,b2,...,bn]
的点积定义为:
a→⋅b→=∑i=1naibi=a1b1+a2b2+...+anbn
几何定义
在欧几里得空间中,点积可以直观地定义为:
a→⋅b→=|a→||b→|cosθ
其中,
θ
表示两个向量之间的角度。
从几何定义来看,模
|a→|
、
|b→|
始终是大于等于
0
的,为了使两个向量的点积最小,应该令两向量的夹角为
180∘
,即
cos180∘=−1
。所以向量
(Δθ1,Δθ2)
的方向应该与向量
(u,v)
正好相反,且
(Δθ1,Δθ2)
这个向量的模在红色圆圈范围内应最大限度地伸长。两个向量之间的关系应该呈现为如下数学表达形式:
[Δθ1Δθ2]=[θ1−aθ2−b]=−η[uv]
其中,
η
是调整向量
[Δθ1Δθ2]
长度的常数。若
η
能使
[Δθ1Δθ2]
的模刚好伸长至红色圈的边界,这个时候损失函数
L
是最小的。

最优参数整理写为:
[θ1θ2]=[ab]−η[uv]=[ab]−η[L′θ1(a,b)L′θ2(a,b)]
上式实际上就是梯度下降更新参数的过程:以
(a,b)
为初始参数,求损失函数对每一个参数变量的偏导数,计算偏导数在初始点
(a,b)
的偏导值,构成一个向量,即梯度。梯度乘以一个常数学习率后,与初始参数做减法,得到更新后的参数。
梯度下降的前提条件
从形式化推导的过程和结果来看,利用梯度下降方法找到最小值的前提条件是什么?或者说,满足什么条件下,梯度下降法才能奏效?

上述形式化推导过程是基于:损失函数能够近似写为
1
阶导的泰勒展开。即下式能够成立:
L(θ)=s+u(θ1−a)+v(θ2−b)
而一个函数能在某点,近似等于
1
阶导的泰勒展开(或者说
1
阶泰勒展开能够作为函数的近似表达),其前提条件是:
- 对于一元函数
h(x)
,其能够在
x=x0
处做泰勒展开,必须保证
x
无限趋近于
x0
- 对于二元函数
L(θ1,θ2)
,其能够在
(θ1,θ2)=(a,b)
处做泰勒展开,必须保证
θ1
无限接近于
a
,
θ2
无限接近于
b
因为存在约束条件
(θ1−a)2+(θ2−b)2≤d2
,若
(θ1,θ2)
无限趋近于
(a,b)
,即变量的取值
(θ1,θ2)
非常接近中心点
(a,b)
,则意味着红色圆圈的半径
d
也必须足够小。
形式化推导最后得到的最优参数表达式即梯度下降的实现过程。这说明梯度下降能够找到最小值,是基于“
(θ1,θ2)
无限趋近于
(a,b)
、红圈半径
d
无穷小”这个前提的。而学习率
η
与
d
是成正比的,所以理论上,学习率
η
也要无穷小,才能保证每一次参数更新,损失函数都不断减小。
但在实操中,学习率不可能无限小,通常只要保证足够小,就可以做梯度下降。总之,学习率如果没有设置好,就会导致每次更新参数时,泰勒展开式
L(θ)=s+u(θ1−a)+v(θ2−b)
并不成立,梯度下降的前提都失效了,也就不能保证参数更新后损失函数是减小的。
上面的损失函数
L
只考虑泰勒展开到
1
阶导,事实上还可以考虑展开到
2
阶导或更高阶导,此时学习率就可以设得大一点。但这里没有涉及展开到更高阶导的方法(如
2
阶泰勒展开的牛顿法),是因为实践中,尤其是做深度学习,展开到高阶导的方法并不普及,因为要多计算二阶导,甚至计算Hessian矩阵及其逆矩阵,这个运算量是无法承受的,用这么复杂的运算量去换取参数更新的精度,是得不偿失的。所以做深度学习还是常用展开到
1
阶导的梯度下降。
梯度下降的局限
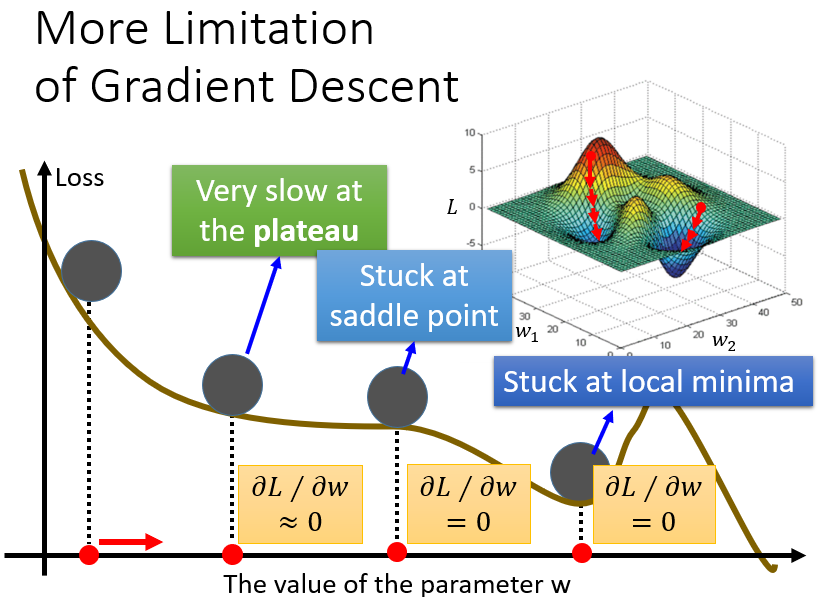
关于梯度下降的缺陷,ML Lecture 1: Regression - Case Study中提到:
随机选取初始参数,进行更新,最后可能卡在局部最小值,参数就停止更新
在整个误差曲面上,导数值为
0
的点不止全局/局部最小值,也有可能是鞍点。鞍点的位置上图浅蓝色框所示,在该点处,导数值为
0
却并非最小值点,参数也有可能卡在鞍点处停止更新
在实际迭代操作中,我们通常不会真的等到导数值为
0
,才停止参数的更新,而是会设定一个阈值,当导数值小于此阈值时,我们就认为损失函数已经差不多接近最小值,参数也差不多接近最优,并停止迭代。但这样的做法会带来问题:绿色框对应的点,其实离全局/局部最小值、鞍点还很远,但由于处在非常平坦的地方,其计算出来的微分值特别小,每一次参数更新都只前进一点点,若此时误以为已经接近目标而停止迭代,那么求出来的参数是不理想的
ML Lecture 3-2: Gradient Descent (Demo by AOE)
ML Lecture 3-3: Gradient Descent (Demo by Minecraft)