程序示例精选
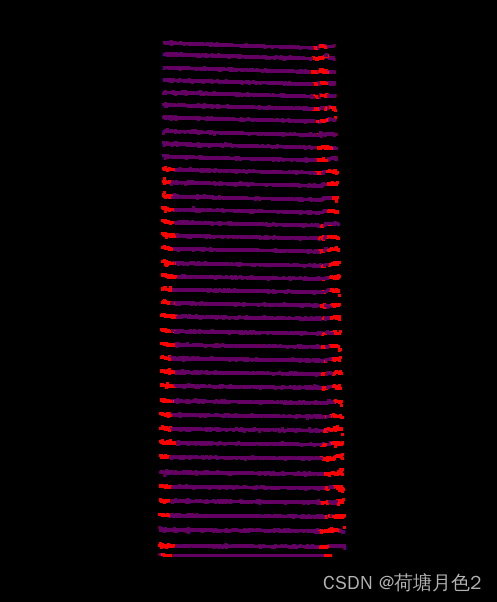
C++ PCL点云曲率分割颜色标识
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
{kind=link}
前言
这篇博客针对《C++ PCL点云曲率分割颜色标识》编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
运行结果

文章目录
一、所需工具软件
二、使用步骤
1. 主要代码
2. 运行结果
三、在线协助
一、所需工具软件
1. VS2019
2. C++
二、使用步骤
代码如下(示例):
#include <iostream>
#include <vector>
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/principal_curvatures.h>
#include <pcl/visualization/cloud_viewer.h>
using namespace std;
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile<pcl::PointXYZ>("20191009_Cloud222 - Cloud2-1 las2pcd-move-scanline.pcd", *cloud); //读取点云
cout << "Loaded " << cloud->points.size() << " points." << endl;//显示读取点云的个数
// 计算点云的法线
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> n;
n.setInputCloud(cloud);
//设置邻域点搜索方式
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
n.setSearchMethod(tree);
//设置KD树搜索半径
//n.setRadiusSearch (0.02);
n.setKSearch(25);
//定义一个新的点云储存含有法线的值
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
//计算出来法线的值
n.compute(*normals);
// 建立主曲率计算
pcl::PrincipalCurvaturesEstimation<pcl::PointXYZ, pcl::Normal, pcl::PrincipalCurvatures> p;
// 计算主曲率
pcl::PointCloud<pcl::PrincipalCurvatures>::Ptr pri(new pcl::PointCloud<pcl::PrincipalCurvatures>());
cout << "output points.size: " << pri->points.size() << endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_b(new pcl::PointCloud<pcl::PointXYZRGB>);
cloud_b->points.resize(cloud->size());
for (int i = 0; i < cloud->points.size(); i++)//所有点赋予灰色
{
cloud_b->points[i].x = cloud->points[i].x;
cloud_b->points[i].y = cloud->points[i].y;
cloud_b->points[i].z = cloud->points[i].z;
/*cout << "曲率:" << pri->points[i].pc1 << ";"
<< pri->points[i].pc2 << ";"
<< (pri->points[i].pc1 + pri->points[i].pc2) / 2 << ";"
<< pri->points[i].pc1 * pri->points[i].pc2<<endl;*///逐点显示计算的最大曲率,最小曲率,平均曲率,高斯曲率
}
for (int i = 0; i < pri->points.size(); i++)//
{
//if (pri->points[i].pc1>0.01)//最大曲率
//if (pri->points[i].pc2>0.01)//最小曲率
//if ((pri->points[i].pc1 + pri->points[i].pc2)/2>0.01)//平均曲率
}
//显示第0个点的最大曲率、最小曲率、平均曲率、高斯曲率、法向量计算出来的曲率。目的:就是想看看法向量这个数据结构里的曲率到底计算的是哪个曲率。结果:好像哪个都不是
cout << "曲率:" << pri->points[0].pc1 << ";"
<< pri->points[0].pc2 << ";"
<< (pri->points[0].pc1 + pri->points[0].pc2) / 2 << ";"
<< pri->points[0].pc1 * pri->points[0].pc2 << ";"
<< normals->points[0].curvature << endl;
pcl::visualization::CloudViewer viewer("Viewer");
viewer.showCloud(cloud_b);
pcl::io::savePLYFile<pcl::PointXYZRGB>("20191009_Cloud222 - Cloud2-1 las2pcd-move-scanline-angle2.ply", *cloud_b);
getchar();
return 0;
}
运行结果
三、在线协助:
如需安装运行环境或远程调试,见文章底部个人 QQ 名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Visual Studio, Qt, C++, Python编程语言入门指导
3)界面美化
4)软件制作
当前文章连接:https://blog.csdn.net/alicema1111/article/details/132666851
个人博客主页:https://blog.csdn.net/alicema1111?type=blog
博主所有文章点这里:https://blog.csdn.net/alicema1111?type=blog
博主推荐:
Python人脸识别考勤打卡系统:
https://blog.csdn.net/alicema1111/article/details/133434445
Python果树水果识别:https://blog.csdn.net/alicema1111/article/details/130862842
Python+Yolov8+Deepsort入口人流量统计:https://blog.csdn.net/alicema1111/article/details/130454430
Python+Qt人脸识别门禁管理系统:https://blog.csdn.net/alicema1111/article/details/130353433
Python+Qt指纹录入识别考勤系统:https://blog.csdn.net/alicema1111/article/details/129338432
Python Yolov5火焰烟雾识别源码分享:https://blog.csdn.net/alicema1111/article/details/128420453
Python+Yolov8路面桥梁墙体裂缝识别:https://blog.csdn.net/alicema1111/article/details/133434445