书接上回
2.2.2.3规划控制模块
2.2.2.3.1.全局导航规划
当用户输入导航终点时,全局导航规划模块会根据高精地图的覆盖区域将全局导航路径分为ICA,NCA可用段。实现ICA/NCA功能的划分及自动升降级。
当自车未按照导航路径行驶时(如未使出指定匝道,路口未按照要求转向),重规划触发,全局导航规划模块需要根据自车当前位置,对导航路径进行重规划。
2.2.2.3.2.驾驶员行为估计
当 ICA、NCA 系统位于横向 Override 状态时,驾驶员行为估计模块依据当前方向盘转角、当
前道路拓扑结构预测自车轨迹,作为横向规划结果输出给纵向规划模块进行速度规划。
2.2.2.3.3.横向行为决策
横向行为决策指换道决策,将换道决策输出至后续规划模块。
根据当前激活ICA、NCA 的功能,换道决策的触发方式分为以下三种:用户拨杆触发换道(ICA、NCA支持)、依据全局导航规划模块的导航触发换道(仅NCA支持)和基于统计信息的车流触发换道(仅 NCA 支持)。当换道决策触发时,自车开始准备换道。
当系统无换道决策触发时,自车保持当前车道中顺行行驶。换道决策触发条件:
(1)拨杆触发:当 ICA、NCA 功能激活时,用户向左或向右拨换道拨杆,在交通规则允许的情况下,换道决策触发。系统开始在目标车道上寻找合适的可汇入空间,并锁定该空间,下发给运动规划模块。当拨杆换道触发后20s,系统无法在目标车道找到合适的可汇入空间,换道决策停止触发。
(2)导航触发:NCA 功能激活,从全局导航规划模块得到需要驶出的匝道口或需驶入的路口,判定自车是否需要换道。如自车需要换道,根据系统换道请求确认的相关设置,
(a) 距需要驶出的匝道口HWT=(所需换道次数*30s+5s)时发出换道请求或自动触发换道决策。如所需换道次数小于2次,距匝道口HWT=65s时提示或触发。
(b)距需要驶过的路口HWT= (所需换道次数*30s+10s)时发出换道请求或自动触发换道决策。如所需换道次数小于2次,距路口HWT=70s时提示或触发。
当开启换道请求确认时,发出换道请求 5s。
i.若驾驶员5s内无操作,则触发换道决策,自车开始搜寻合适可汇入空间。
ii.若 5s 内驾驶员取消请求,系统不再提示换道请求,不发出换道决策,使自车保持当前车道。等待导航重规划。
iii.若距匝道口或路口HWT=30s时自车仍没有位于最终目标车道,系统提示驾驶员可进行手动接管进行换道。
iv.若距匝道口HWT=5s或路口HWT=10s自车无法换至最终目标车道,完成或取消当前换道,换道决策停止触发,使自车保持当前车道。等待导航重规划。
当关闭换道请求确认时,系统自动触发换道决策。
i.若距匝道口或路口 HWT=30s 时自车仍没有位于最终目标车道,系统提示驾驶员可进行手动接管进行换道。
ii.若距匝道口 HWT=5s 或路口 HWT=10s 自车无法换至最终目标车道,完成或取消当前换道,换道决策停止触发,使自车保持当前车道。等待导航重规划。
超车触发:距需要驶出的也道、路口或收费站、导肌终点等HWT>60s。自车周围环境满
(3)超车触发:距需要使出的匝道,路口或收费站,导航终点等HWT>60s。自车周围环境满足以下条件:基于一定时间统计结果的相邻车道平均车速高于自车跟车车速5km/h,或相邻车道空旷且自车跟车车速低于当前道路限速5km/h。根据系统换道请求确认的相关设置,发出换道请求或触发换道决策。
当开启换道请求确认时,换道请求发出5s。
(a)若驾驶员5s内无操作,则触发换道决策,自车开始搜索合适可汇入空间。
(b)若5s内驾驶员取消请求,系统5分钟内不再提示车流换道请求,不发出换道决策。
当关闭换道请求确认时,系统自动取消换道决策。
可汇入空间定义:
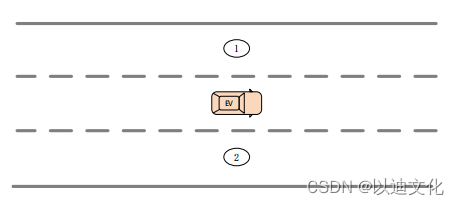
(a)A类可汇入空间
目标车道前后方向均没有车辆。当目标车道为左侧车道时,1形成换道空间A,目标车道为右侧时,2形成换道空间A。
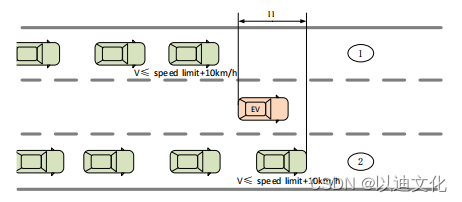
(b)B类可汇入空间
目标车道车流前方无车辆,车流头车位于自车后杠后方(如左侧车道所示)或车流头车前杠超出自车后杠,且超出距离ll<30m(如右侧车道所示)。车流头车速度v<=道路限速+10kph。当目标车道为左侧车道时,1形成换道空间B,目标车道为右侧时,2形成换道空间B。
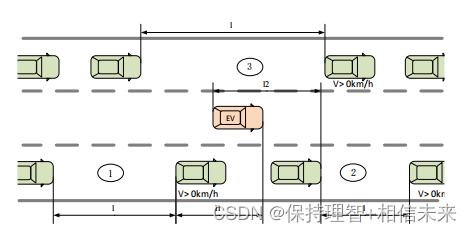
(c)C类可汇入空间
目标车道车流后方无车辆,车流尾车位于自车前杠前方(如左侧车道所示)或车流尾车后杠位于自车前杠后方,且落后距离ll<30m(如右侧车道所示)。车流尾车速度v>0kph。当目标车道为左侧车道时,1形成换道空间C,目标车道为右侧时,2形成换道空间C。

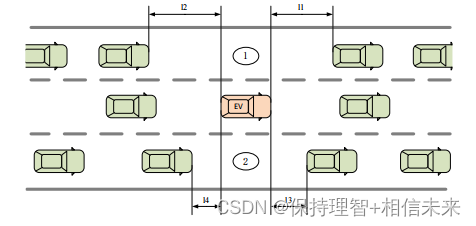
(d)D类可汇入空间
目标车道有连续的车流,车流中存在空间。空间长度1>=(自车当前车速*5s+自车长度)。
空间前车速度v>0kph。空间后车速度-前车车速<=10kph。自车完全位于空间内(左侧车道所示),当空间落后自车时空间前后杠落后自车前杠距离ll<=30m或当空间领先自车时空间后车前杠领先自车后杠距离12<30m。当目标车道为左侧车道时,3形成换道空间D,目标车道为右侧时,1和2形成换道空间D。
2.2.2.3.4纵向行为决策
(c)当确认的检测结果为黄灯时,则在停止线处加墙;交通灯变绿时,虚拟墙消失。
(2)停车杆虚拟墙
(3)停止牌虚拟墙
2.2.2.3.5横向规划
(1)保持车道中心规划:当自车当前所在车道 HWT=10s 范围内没有障碍物入侵或离车道线过近时,进行保持车道中心规划,使自车沿当前所在车道中心线行驶。
(2)车道内部避让规划:当自车当前所在车道 HWT=10s 内有静态障碍物(如锥筒、石块等)动态障碍物(车辆压线行驶、行人等)入侵或离本车道线横向距离<20cm,且车道剩余宽度允许自车安全通过时(自车不会超出车道边线,且自车两侧与车道边线及障碍物距离>30cm,需实测),进行车道内部避让规划。使自车保持在车道内,向障碍物反方向偏离车道中心线进行避让。避让结束后使自车重新回到车道中心行驶。
(1)保持车道中心规划:当收到换道决策指令及目标可换道空间时,进入换道第一阶段。进行保持车道中心规划,使自车沿当前车道中心线行驶,直到自车落入目标可换道空间中心。自车完全落入换道空间,根据换道空间有无前后车或前后车状态,需满足自车前杠距选定换道空间前车后杠 HWT≥2s,自车后杠距选定换道空间后车前杠 HWT≥3s。
(2)换道规划:当自车落入目标可换道中心时,进入换道第二、三阶段。进行换道规划,使车辆沿车道进行横向偏移,平稳的向目标车道进行换道,落入目标可换道空间中,沿目标车道中心行驶。当自车仍位于原车道且未压车道线时,属于换道第二阶段;当自车越过车道线时,属于换道第三阶段。当自车完全落入可换道空间且位于目标车道中心时,属于换道第四阶段,换道结束。换道过程中,可换道空间需持续满足如下条件。
(a)A类换道空间,满足要求
(b)B类换道空间,自车后杠距目标车道头车前杠HWT≥2.5s,TTC≥18s。
(c)C类换道空间,自车前杠距目标车道尾车后杠HWT≥1.5s,TTC≥12.5s。
(d)D类换道空间,自车前杠距换道空间前车后杠HWT≥1.5s,TTC≥12.5s,自车后杠
(3)换道取消规划:
(a)自车位于第一、第二换道阶段时,自车具有原车道路权,当目标车道可换道空间
(b)当自车位于第三换道阶段时,当目标车道换道空间不再满足要求时,原车道空间仍满足自车后杠距目标车道头车前杠HWT≥2s且自车前杠距目标车道尾车后杠HWT≥1.5s,进行换道取消规划。换道取消过程中,原车道空间必须持续满足上述要求。
(4)换道接管规划:
(a)当换道规划时,目标车道可换道空间不再满足条件时,同时原车道空间也不再满足要求,进行换道接管规划,使自车沿当前横向偏移量继续行驶,并请求接管。
(b)当换道取消规划时,原车道空间不再满足要求,进行换道接管规划,使自车沿当前横向偏移量继续行驶,并请求接管。
2.2.2.3.6.纵向规划
2.2.2.3.7控制模块