XPilot Safety 主动安全系统
一、前向碰撞预防(Forward Collision Prevention)
- 产品定义
基于车辆前向视觉模块和前毫米波雷达的感知能力,对车辆前方扇形区域内的车辆和VRU(弱势道路使用者) 有可能与本车的运行路线发生碰撞,进行预警、碰撞伤害降低或碰撞避免的一系列安全反馈;
前向碰撞预防系统功能的组成:
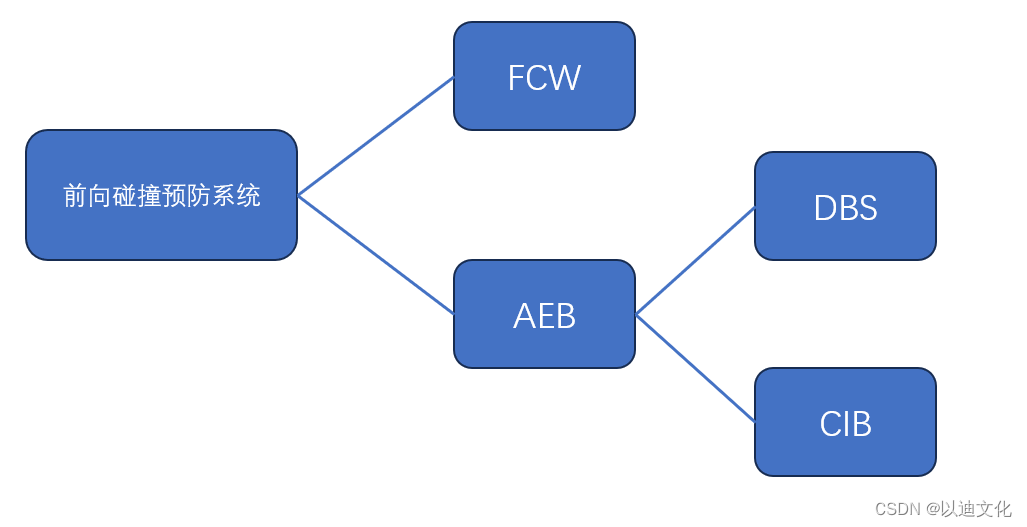
- 功能说明(FCW和AEB部分)
当系统检测到车辆可能与其他车辆或VRU发生前方碰撞时,前向碰撞预防系统将通过视觉、听觉、触觉反馈提示驾驶员主动采取措施进行规避。如果驾驶员没有响应或碰撞可能性非常紧急,系统将介入制动以避免前向碰撞的发生或降低碰撞的伤害。
通过前向视觉感知模块和毫米波雷达,参照当前车辆与目标物的相对速度、与目标物的距离进行安全距离测算,当此距离触发安全距离阀值时,FCW激活,当碰撞风险进⼀步增大时,AEB系统介入;
在前向碰撞预防系统的全过程中,如果碰撞风险解除,比如前方碰撞风险物体消失,或当前处于安全距离内,系统将自动退出介入。
AEB包含两个部分:
(1)DBS:目标是降低车速同时提醒驾驶员主动介入制动以便重新恢复至安全距离以上,如果系统判断制动力仍不足以解除危险,则进⼊CIB;
&#x