前言
记录ros2 机器人开发历程,全当做个笔记,以后用到好查找,也给后来者留下一些脚印。
提示:以下是本篇文章正文内容,下面案例可供参考
一、环境
环境:ubuntu 20.04 ros2 foxy 镭神M10串口版
二、安装雷达
1.绑定串口号,给usb起别名
查看雷达的配置文件 lam10.yaml,找串口连接的串口号wheeltec_laser,把这个串口号和usb绑定,就不会每次插拔雷达usb导致改变了。

sudo gedit /etc/udev/rules.d/usb.rules
KERNELS=="1-1.2:1.0", MODE:="0777", GROUP:="dialout",SYMLINK+="wheeltec_laser"

sudo udevadm control --reload-rules && sudo udevadm trigger #不关机启用配置
sudo ll /dev
输出下面代码说明绑定成功:
lrwxrwxrwx 1 root root 7 3月 20 18:11 wheeltec_laser -> ttyUSB0
2.编译代码
cd ros2_ws
colcon build --packages-select lslidar_driver lslidar_msgs

报错请翻看前面文章:

解决方法:sudo apt install ros-foxy-diagnostic-updater
安装镭神M10雷达编译报错 fatal error: pcap.h: 没有那个文件或目录 #include <pcap.h>_JT_BOT的博客-CSDN博客
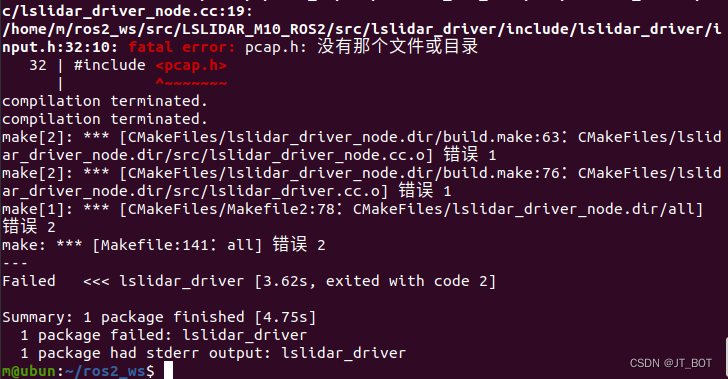 解决方法:sudo apt-get install libpcap-dev
解决方法:sudo apt-get install libpcap-dev
二、运行
cd ros2_ws
. install/setup.bash
ros2 launch lslidar_driver lsm10_uart_launch.py
[INFO] [launch]: All log files can be found below /home/m/.ros/log/2023-03-20-18-53-42-986873-r-13446
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [lslidar_driver_node-1]: process started with pid [13458]
[lslidar_driver_node-1] Lidar is M10
[lslidar_driver_node-1] port = /dev/wheeltec_laser, baud_rate = 460800
[lslidar_driver_node-1] open_port /dev/wheeltec_laser OK !
[lslidar_driver_node-1] [INFO] [1679309623.199013224] [lslidar_driver_node]: Initialised lslidar without error
[lslidar_driver_node-1] [INFO] [1679309623.199191050] [lslidar_driver_node]: Successfully initialize driver...
重开终端启动rviz2
rviz2修改Fixed Frame laser
add by topic laserscan
看到红线说明正常启动

总结
编译各种报错