目录
一、背景
-
背景
目前大火的智能车、机器人、无人驾驶技术,现基于嵌入式系统、人工智能、机器人定位与导航基础 开展了第十四届全国大学生智能汽车竞赛-室外无人驾驶挑战赛参赛
承办商:北京钢铁侠科技有限公司
官方给出的室外光电组教程:伍门学院 -
古月居——ROS人工智能机器人巨佬
对本次比赛的讲解:http://www.guyuehome.com/2584
重难点节选:


二、 难点之避障学习
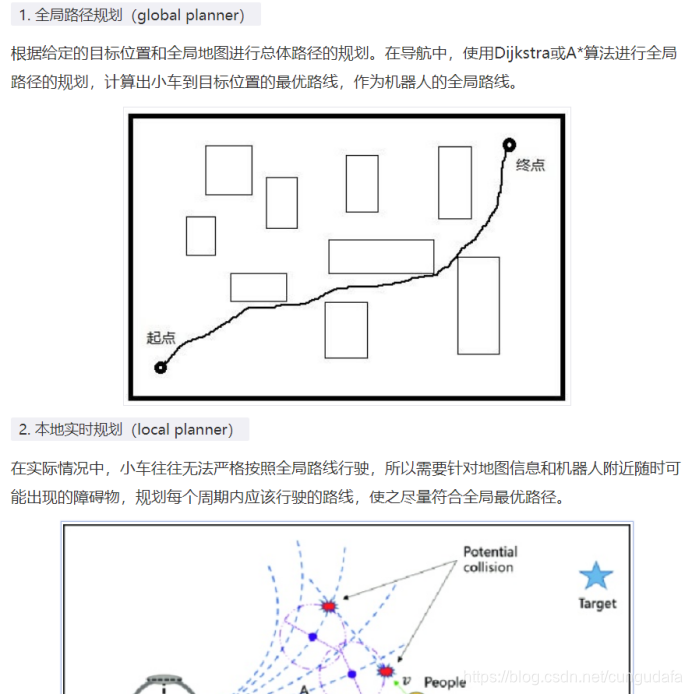
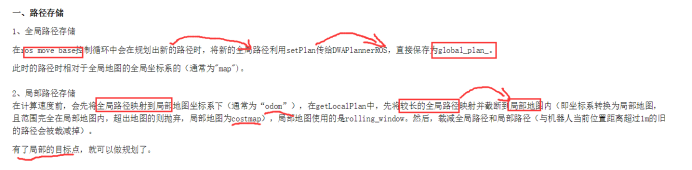
1、什么是全局路径规划与局部路径规划?
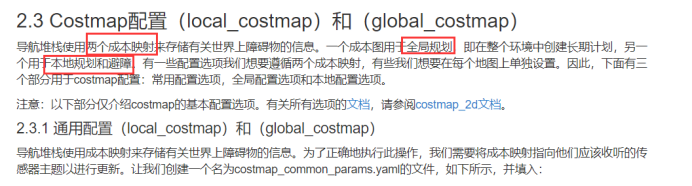
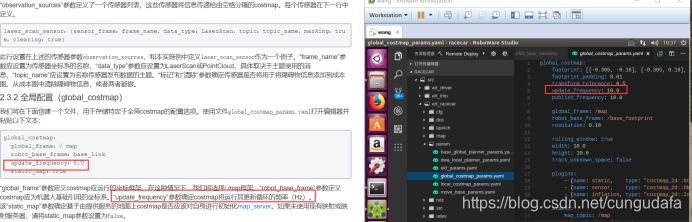
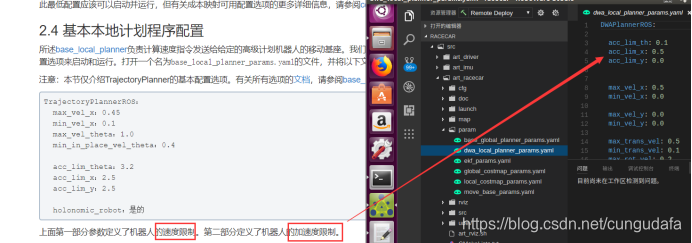
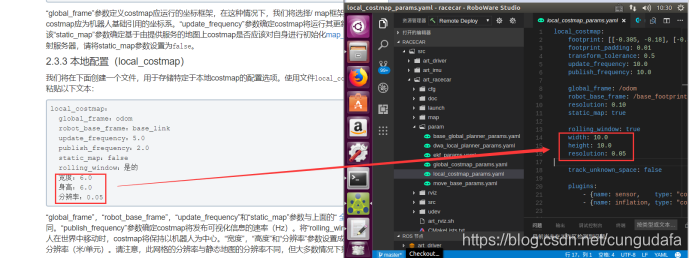
2、细节参数分析:
ROS探索总结(十三)——导航与定位框架:http://www.guyuehome.com/267
以下代码参数源于wiki百科:


3. ros局部路径规划-DWA学习:


三、比赛实参
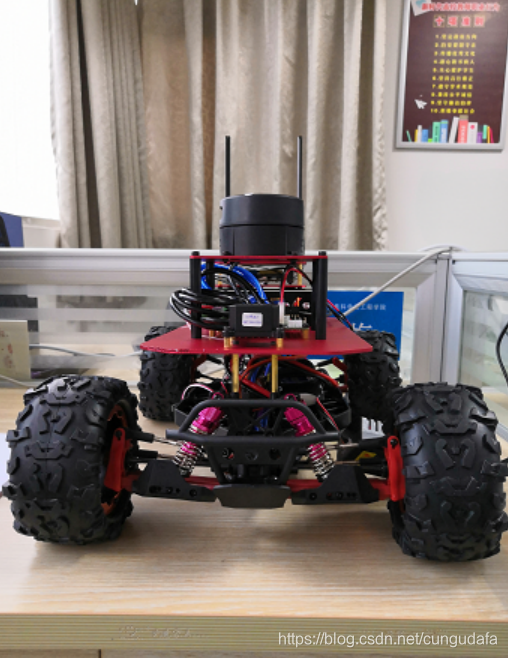
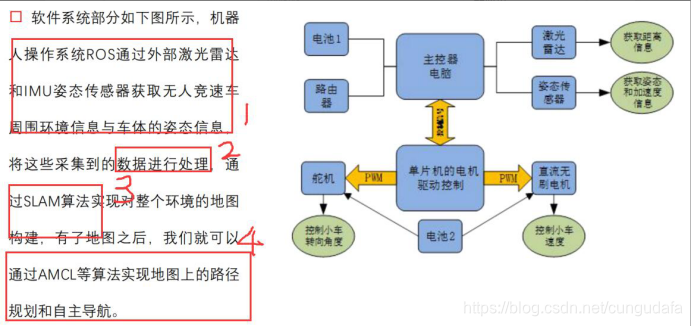
车模:


比赛主要信息:
附: 参考资料
中国大学MOOC《机器人操作系统入门》
避障原理
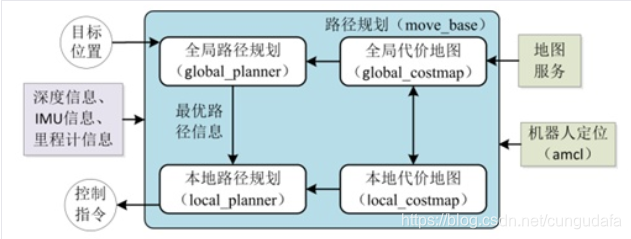
定位(amcl)和路径规划(move_base)
导航,路径规划
未完结(๑• . •๑)~