windows/Linux安装动力学仿真软件Frost并计算cassie机器人运动学和动力学
windows安装动力学仿真软件Frost
本文在Matlab2021b和Mathematica13.1环境下配置运行
1、安装matlab
2、安装mathematica
3、安装Frost
1、下载zip
方法一:git clone https://github.com/ayonga/frost-dev.git frost-dev
方法二:直接点击下载zip文件
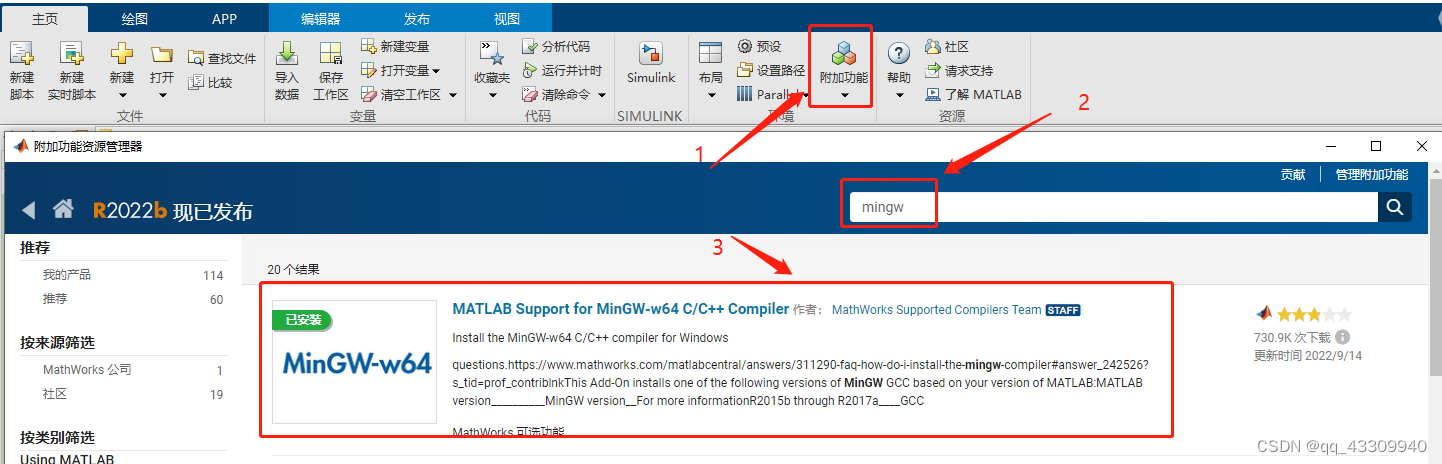
2、安装 MEX 编译器
在matlab中安装MinGW,过程如下图所示
3、设置mathematica环境变量
<安装路径>\Wolfram Research\Mathematica\11.0\
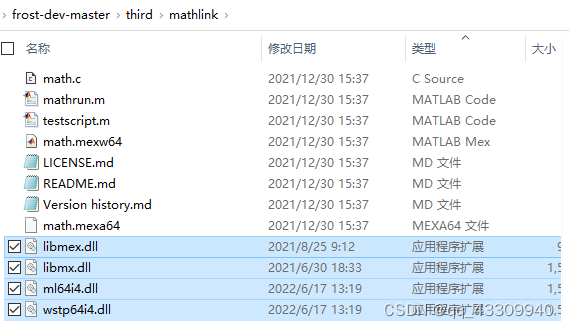
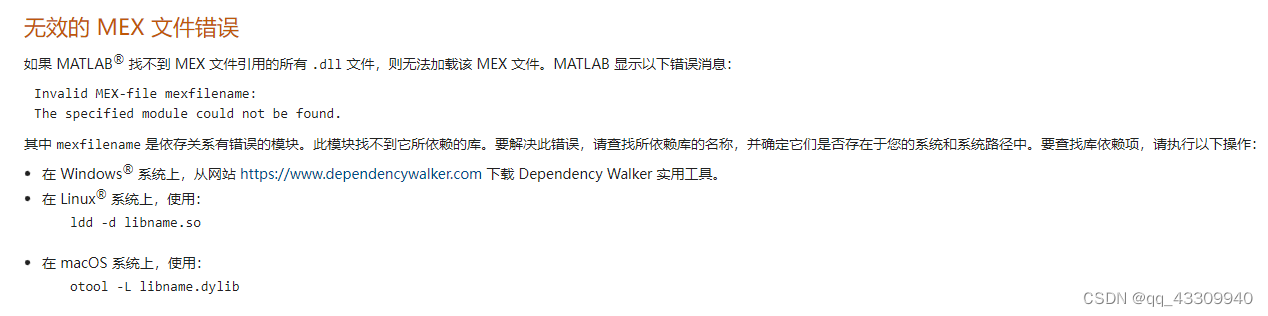
4、复制下图这几个dll到math.mexw64文件所在目录,不然会报找不到指定模块错误
不同版本的matlab和mathematica软件下面几种dll可能不一样,用Dependency Walker 2.2软件查找即可(把math.mexw64拖进去,出现黄色问号的就是缺少的dll)
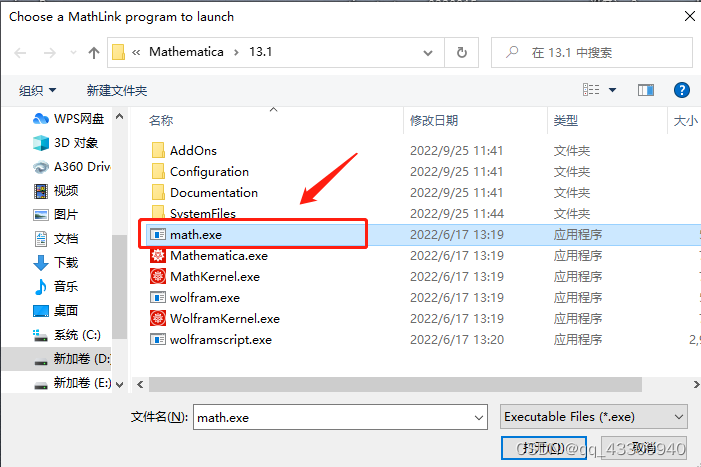
5、如果上面一步操作成功会弹出下面的对话框,选择Mathematica路径下的math.exe文件即可
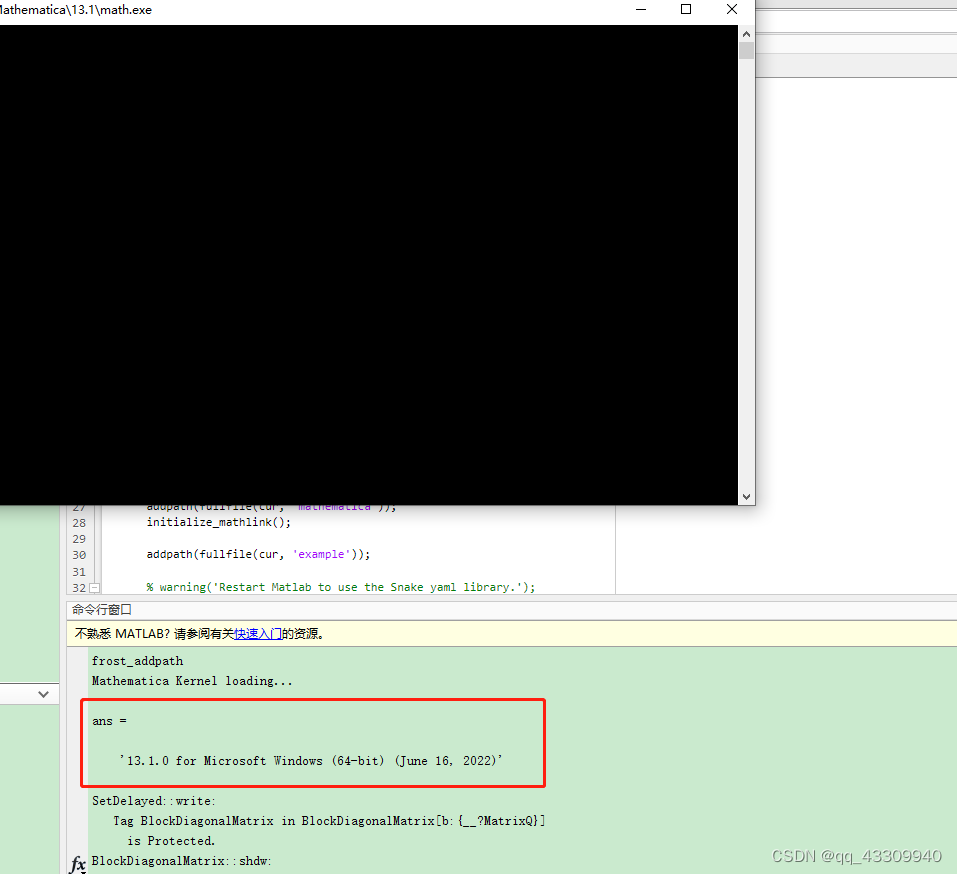
6、出现下面的黑框请不要关闭(mathematica在后台运行),此时会发现matlab中出现下图红框框中的结果,证明该软件安装成功
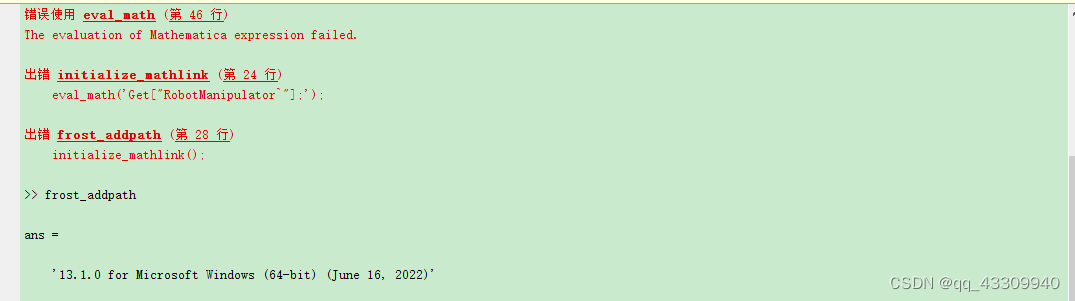
7、第一次运行时会出下下面报错,这个没关系,第二次运行就正常了
Linux安装动力学仿真软件Frost
本文在Matlab2021b和Mathematica13.0环境下配置运行
1、安装matlab
3、安装Frost
安装Frost的过程与在windows环境下类似
1)下载压缩包
2)安装最新的g++编译器
3)运行frost_addpath.m文件,若出现以下错误:
>> frost_addpath
Invalid MEX-file '/usr0/home/rshu/matlab_ws/frost-dev/third/mathlink/math.mexa64': libWSTP64i4.so: cannot open shared object file: No such file or directory
Error in initialize_mathlink (line 8)
math('$Version')
Error in frost_addpath (line 28)
initialize_mathlink();
找到libWSTP64i4.so所在路径,将其添加到.bashrc文件中
先输入命令
sudo gedit .bashrc
打开文件后在其中添加路径
LD_LIBRARY_PATH=<Mathematica安装路径>/Wolfram/Mathematica/13.0/SystemFiles/Libraries/Linux-x86-64:$LD_LIBRARY_PATH
export LD_LIBRARY_PATH
或者直接使用命令行
export LD_LIBRARY_PATH=<Mathematica安装路径>/Wolfram/Mathematica/13.0/SystemFiles/Libraries/Linux-x86-64:$LD_LIBRARY_PATH
之后用命令行运行matlab(直接打开有可能没从.bashrc文件启动,同样会出现错误)
若遇到类似的问题,如:
>> frost_addpath
Invalid MEX-file '/usr0/home/rshu/matlab_ws/frost-dev/third/mathlink/math.mexa64': libML64i3.so: cannot open shared object file: No such file or directory
Error in initialize_mathlink (line 8)
math('$Version')
Error in frost_addpath (line 28)
initialize_mathlink();
同样的方法,找到该文件所在的路径,替换掉上面解决方案中的路径即可,这一错误也可参照官方的github中的issues模块
计算Cassie的动力学示例出错
下载Cassie计算案例
- Open the
model_gen.mscript in MATLAB. - Modify
FROST_PATHto reflect your FROST installation directory. - Generate the Cassie FROST model by runnning the first block of code, ending at line
cassie = Cassie('urdf/cassie.urdf'). - Run the rest of the script to generate and export various kinematic and dynamics functions.
运行后报错:
错误使用 RobotLinks/findBaseLink (第 30 行) Duplicated base links: left_pelvis_abduction and right_pelvis_abduction.
Duplicated base links: left_pelvis_abduction and right_pelvis_abduction.
暂时还未找到解决方法,如有同行遇到这个问题解决的希望可以私信交流
2022.10.11 感谢github上大佬的回复解决了这个问题
具体解决方案如下:
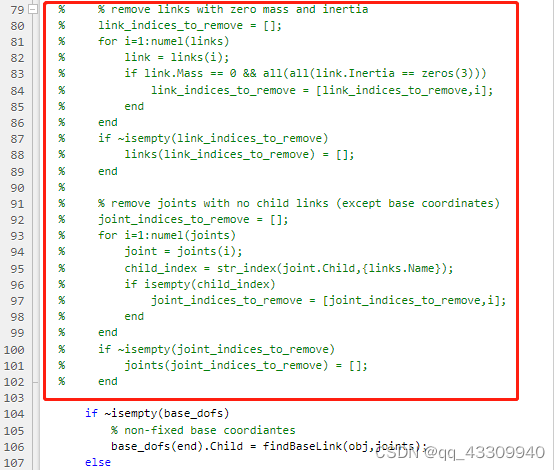
frost-dev\matlab\robotics\@RobotLinks\configure.m中的79-102行忽略了质量和惯性为零的链接,从而导致意外的错误。因此,可以直接重置到frost-dev的前一个版本,即cd frost-dev &&git reset 5e17cf8d9d2f --hard或者注释这些行。
生成的运动学和动力学文件在gen文件夹中
https://zhuanlan.zhihu.com/p/267330682
https://ayonga.github.io/frost-dev/pages/installation.html#setup-default-mex-compiler
https://ww2.mathworks.cn/help/matlab/matlab_external/invalid-mex-file-error.html
https://github.com/UMich-BipedLab/Cassie_Model
https://github.com/UMich-BipedLab/Cassie_Model/issues/5#issuecomment-1274028519