机器人学基础(3)-动力学分析和力-拉格朗日力学、机器人动力学方程建立、多自由度机器人的动力学方程建立
本章节主要包括拉格朗日力学、拉格朗日函数及建立求解、多自由度机器人的动力学方程、机器人的静力分析、坐标系间力和力矩的变换,主要结合例题进行掌握理解
文章目录
一、拉格朗日力学
动力学分析是为了研究机器人应该以多大力进行驱动,虽然根据运动学方程+微分运动可以得到机器人的位置和速度,当机器人真正进行动起来是由电机或者驱动器的力大小来决定的,所以进行动力学分析就是为了获得在所期望的速度和位置下,各个关节电机的产生的力应该为多少,即需要建立机器人的动力学方程。
建立动力学方程的方法有多种,牛顿力学法、拉格朗日力学法、牛顿-欧拉法等。
牛顿-欧拉公式可以被认为是一种解决动力学问题的力平衡方法;
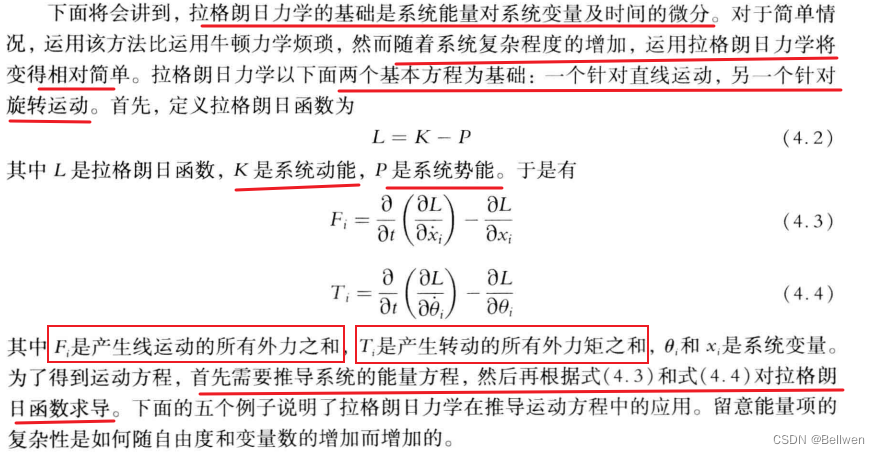
拉格朗日公式则是一种基于能量的动力学方法。
因为牛顿-欧拉法作者尚未学习到,后续深入学习了再进行补充,本文主要对拉格朗日力学法进行讲解。
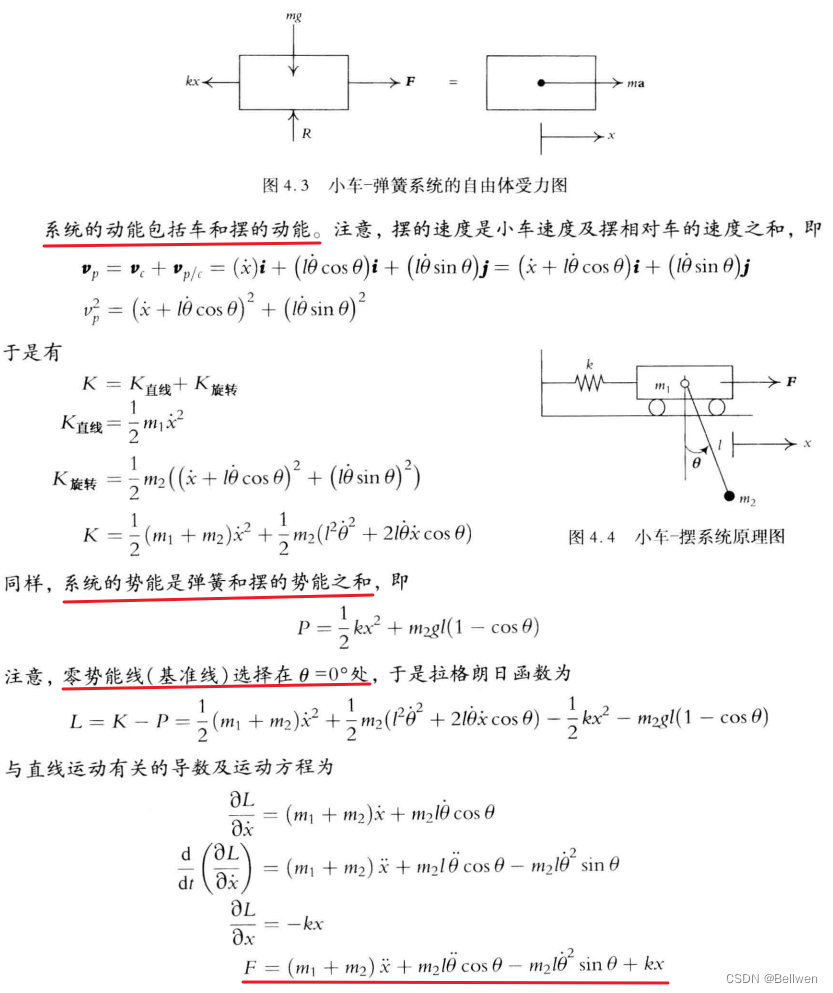
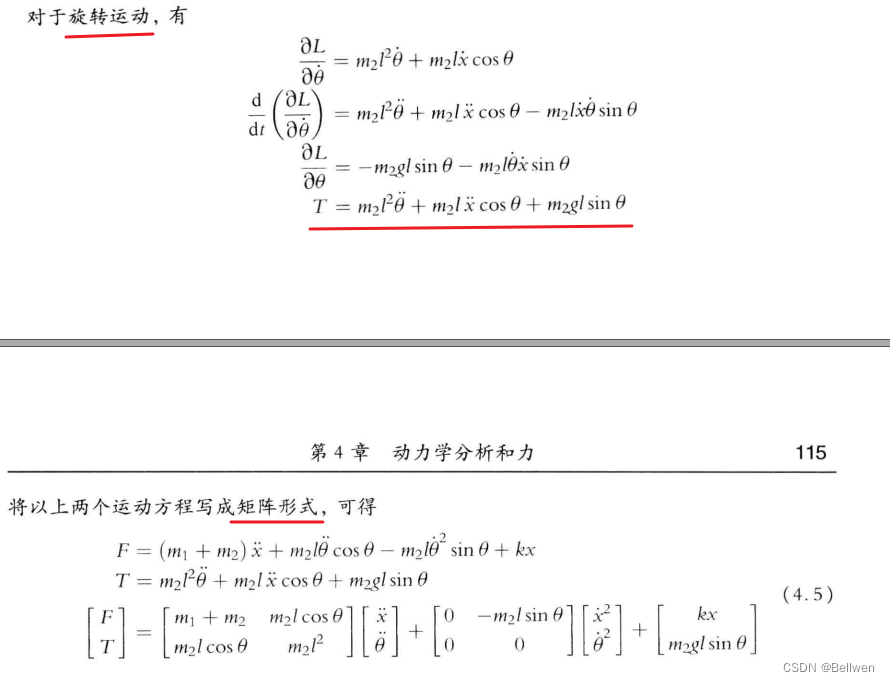
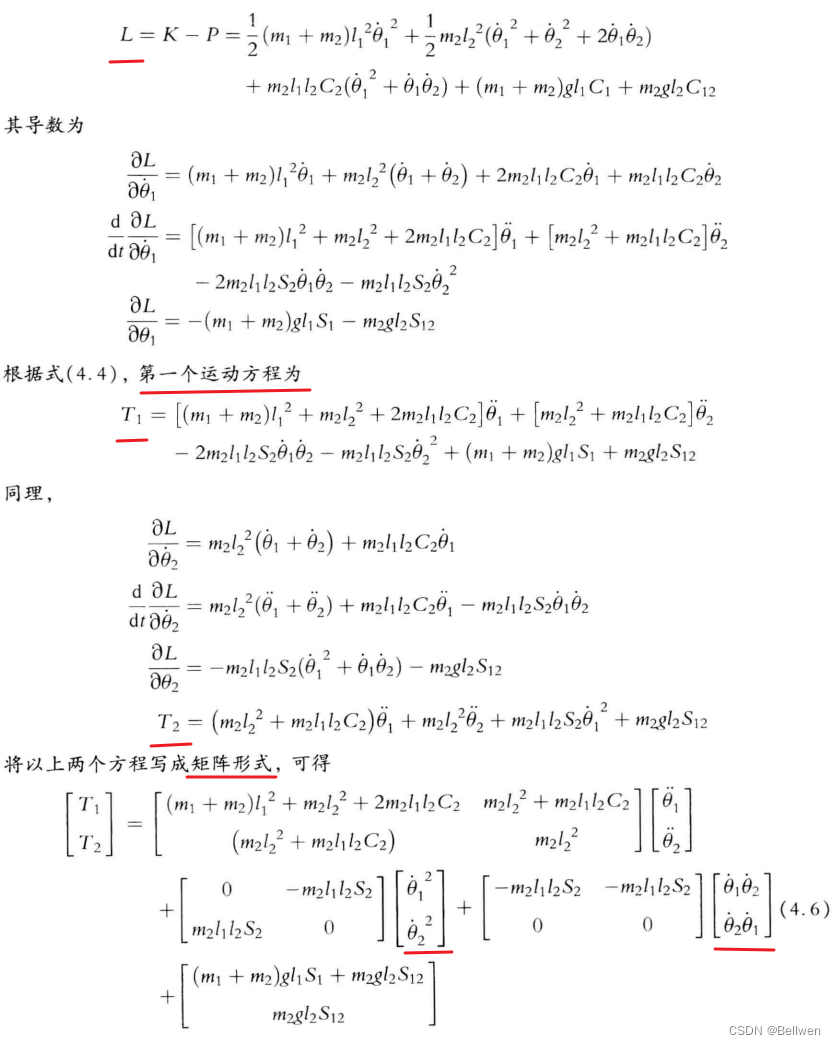
1、例题1:具有线运动和转动的动力学方程

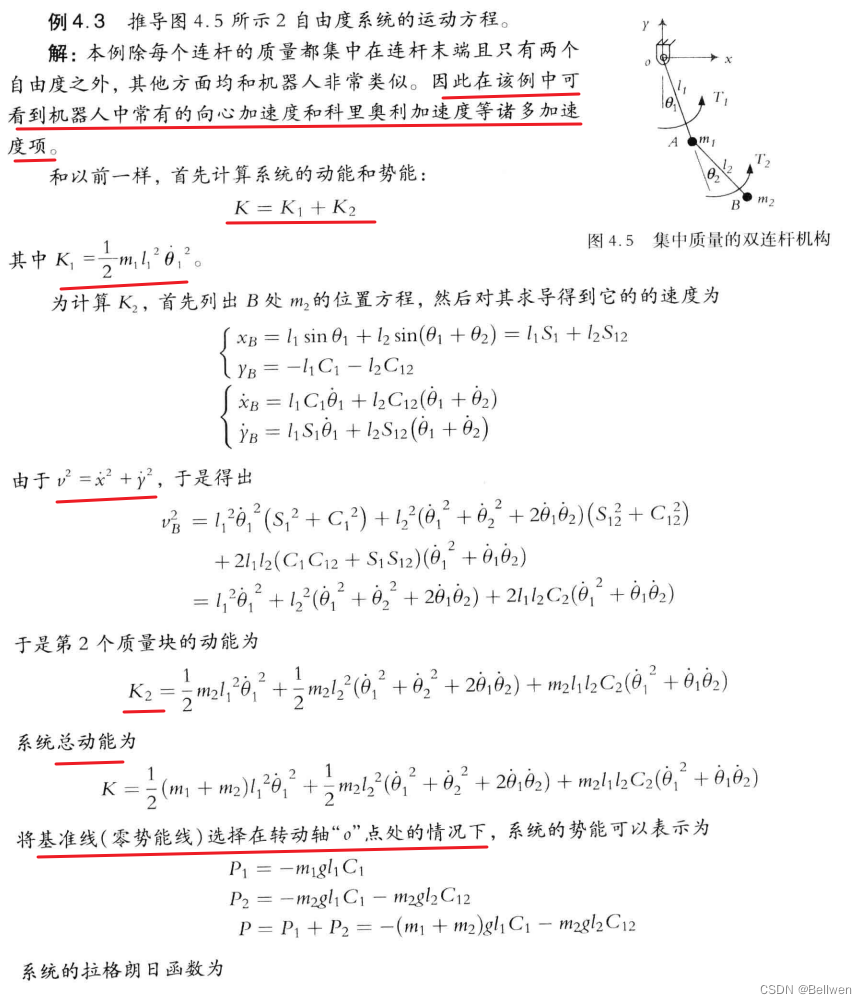
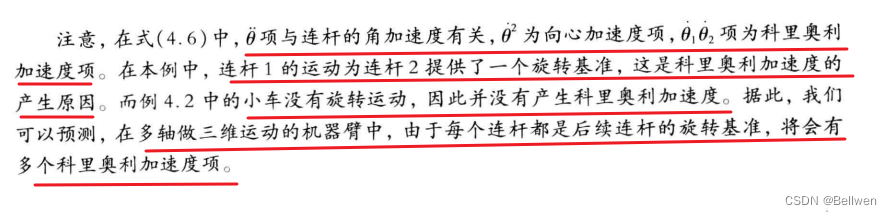
2、例题2:具有向心加速度和科里奥利加速度的动力学方程
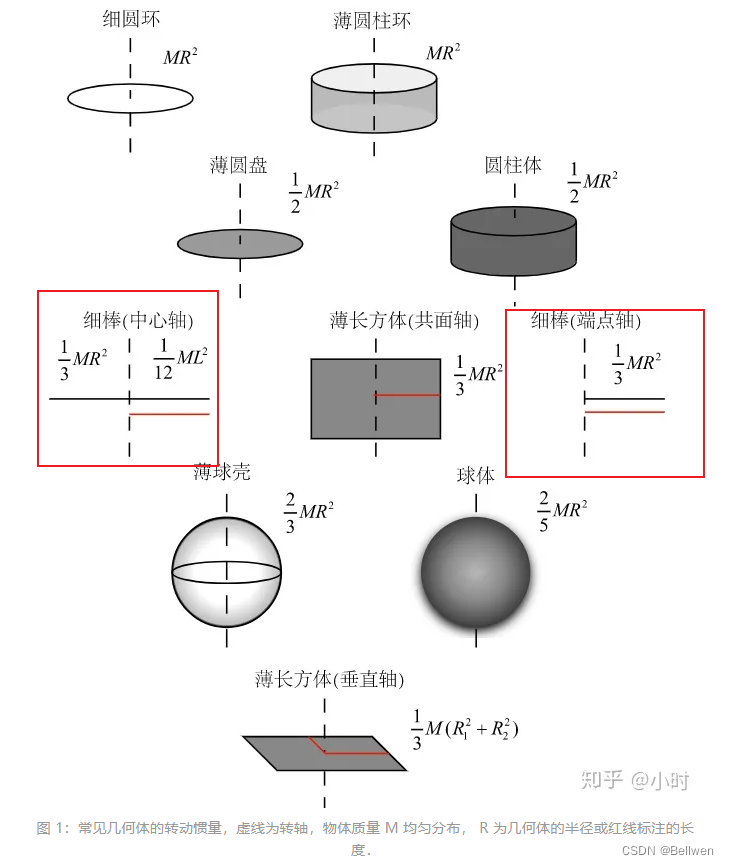
3、例题3:具有转动惯量的动力学方程
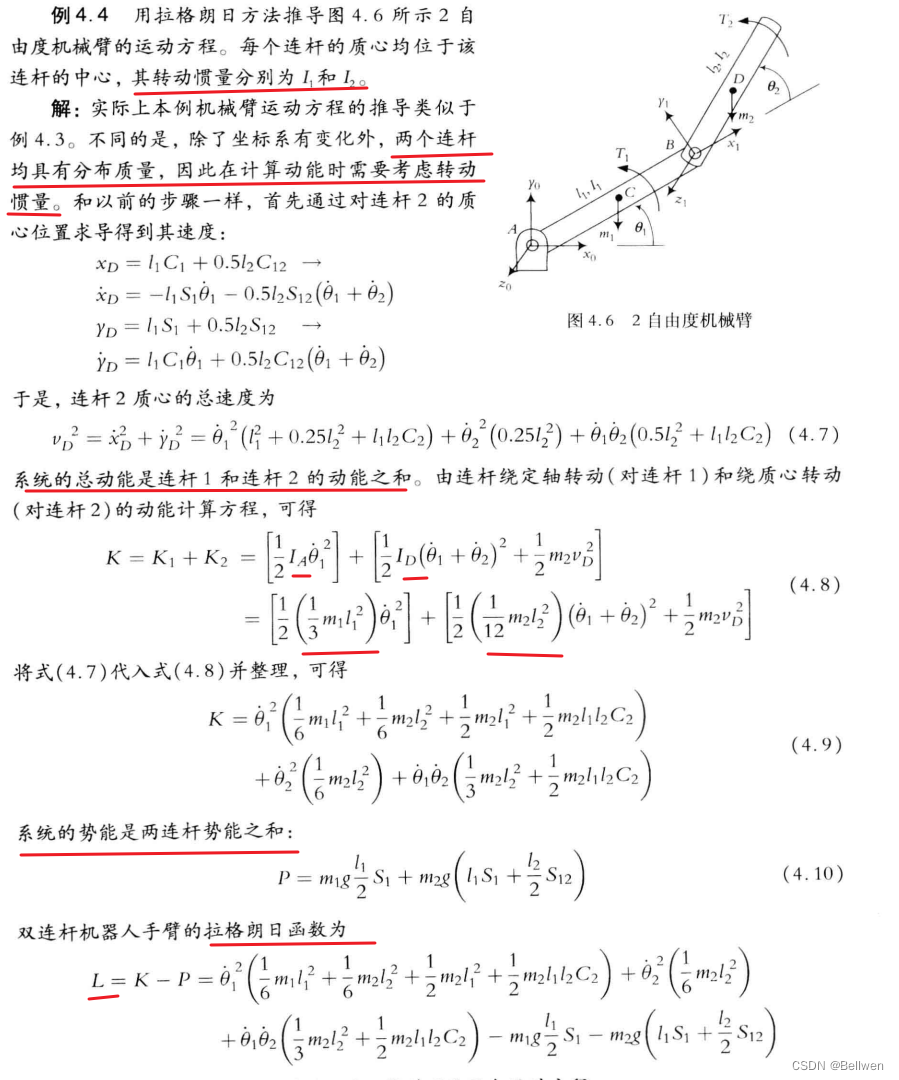

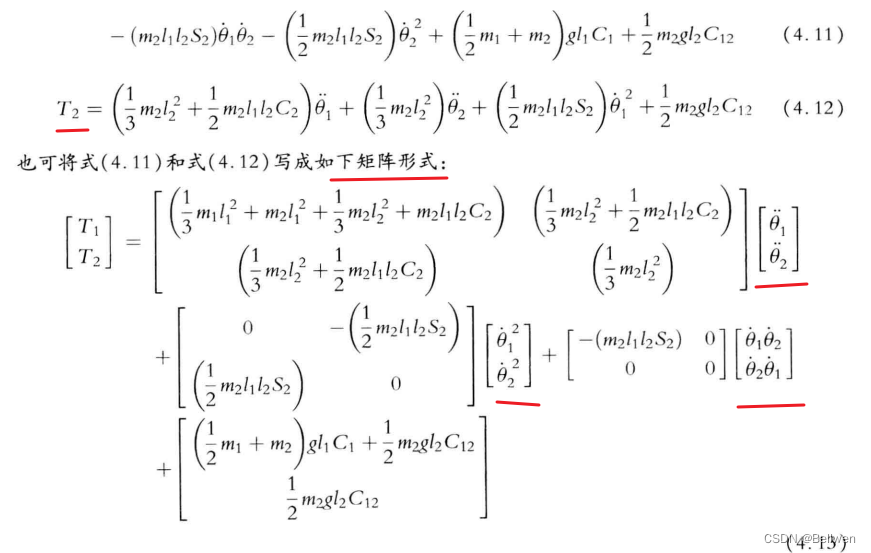
本题涉及转动惯量公式求法。
二、 多自由度机器人的动力学方程
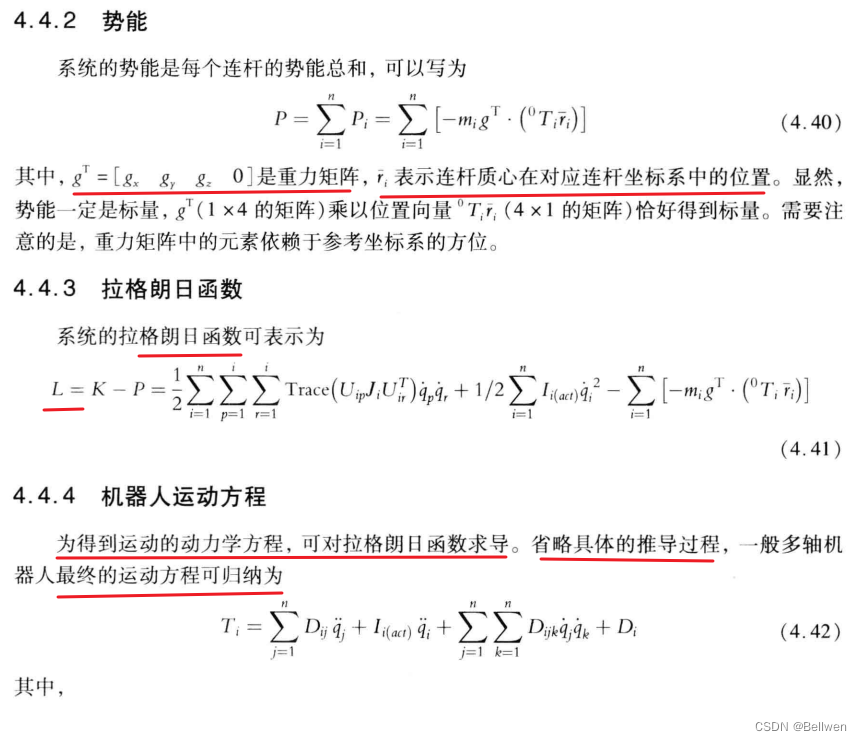
多自由度机器人的动力学方程会复杂的多,但也一样可以通过先计算连杆和关节的动能和势能来定义拉格朗日函数,然后再通过将拉格朗日函数对关节变量求导得到动力学方程。
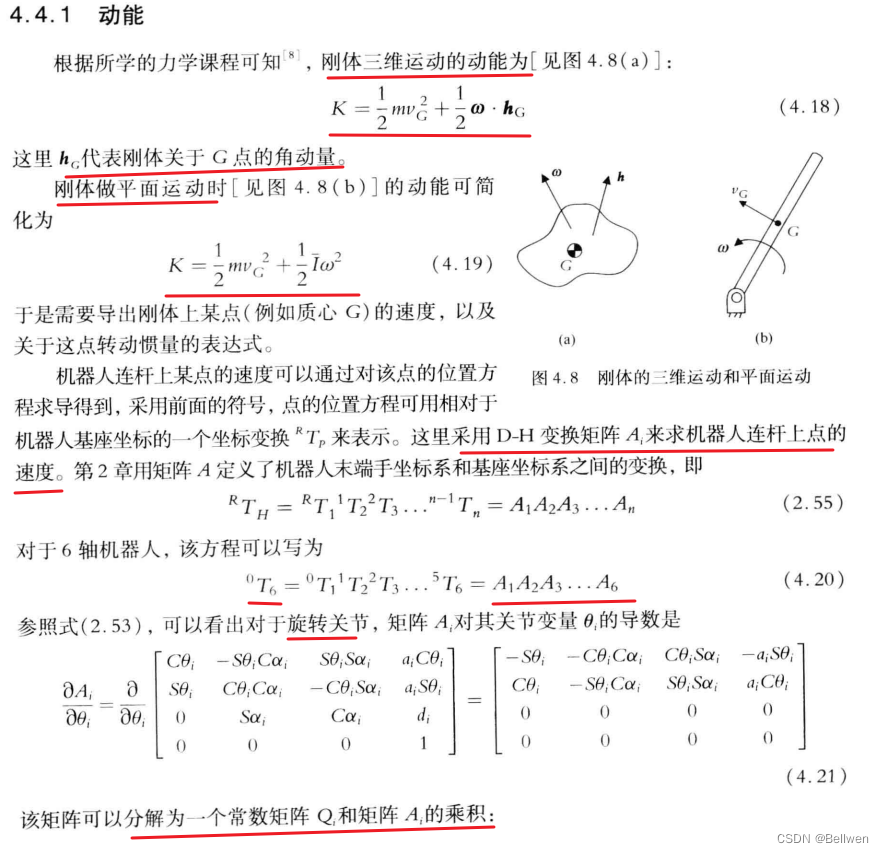
上述是多自由度机器人求总动能的过程,可以理解为:
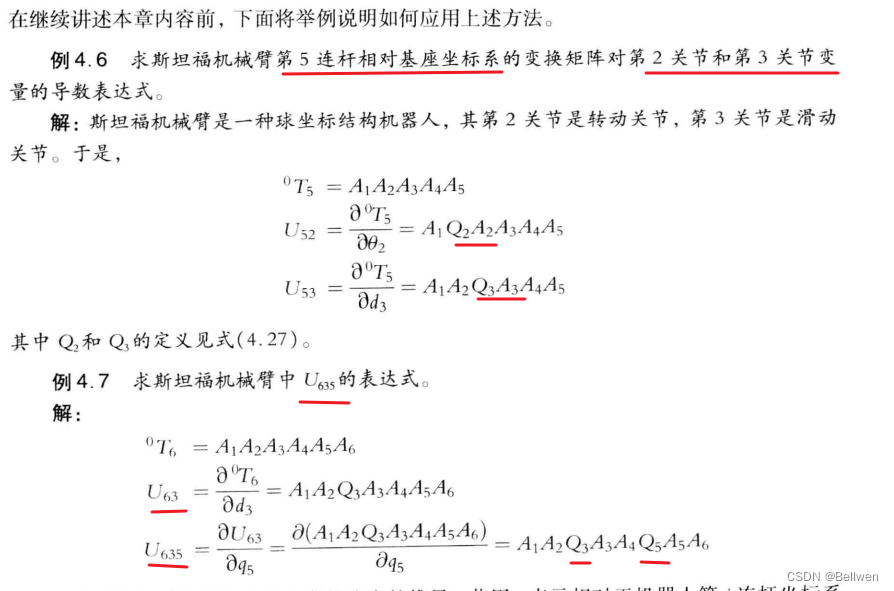
1、机器人上某点的坐标可能不是基于基座坐标系的,所以会涉及到坐标变换;
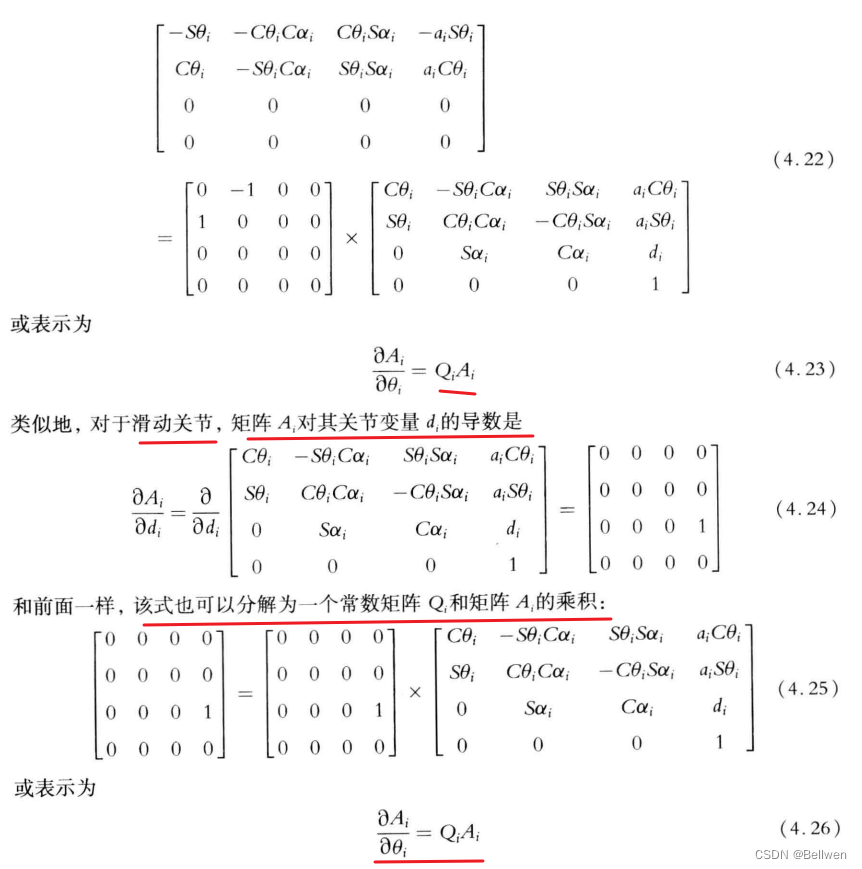
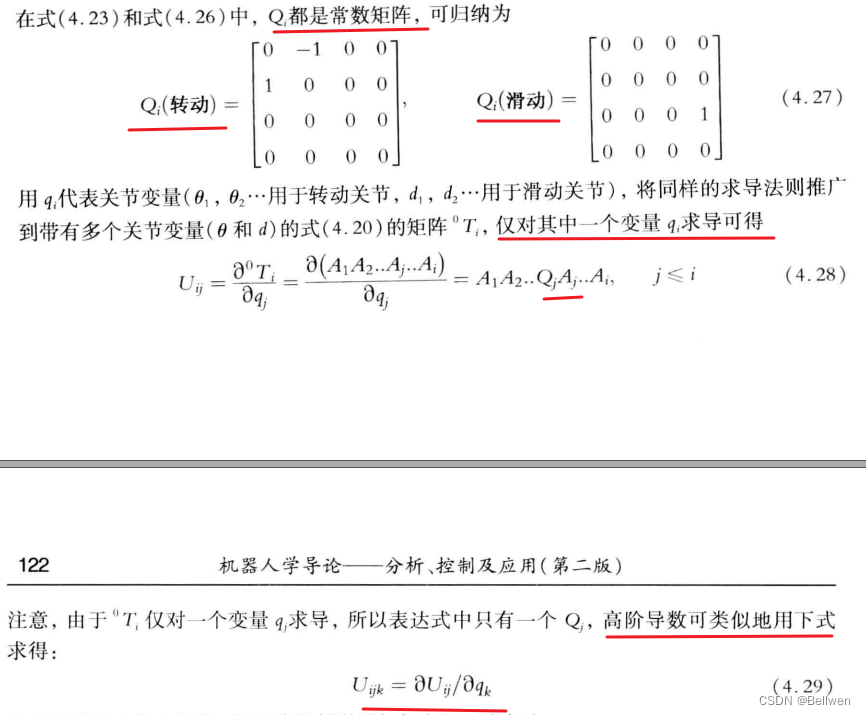
2、需要对位置矩阵对关节变量求导,涉及旋转关节和滑动关节,为了后续便于便于表示引入了Q和U
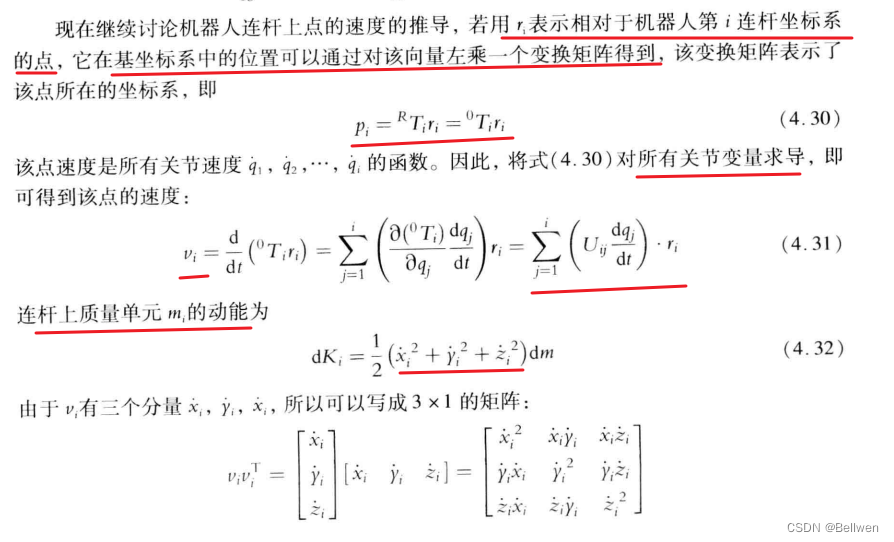
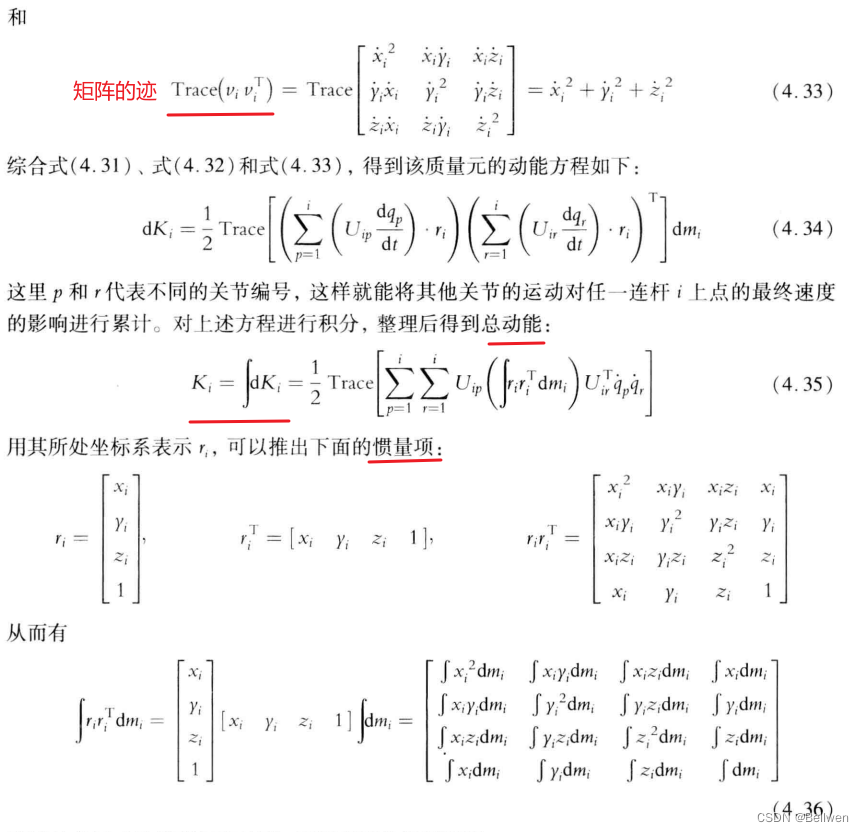
3、需要求连杆速度求动能,便于处理和表示,引入了矩阵的迹
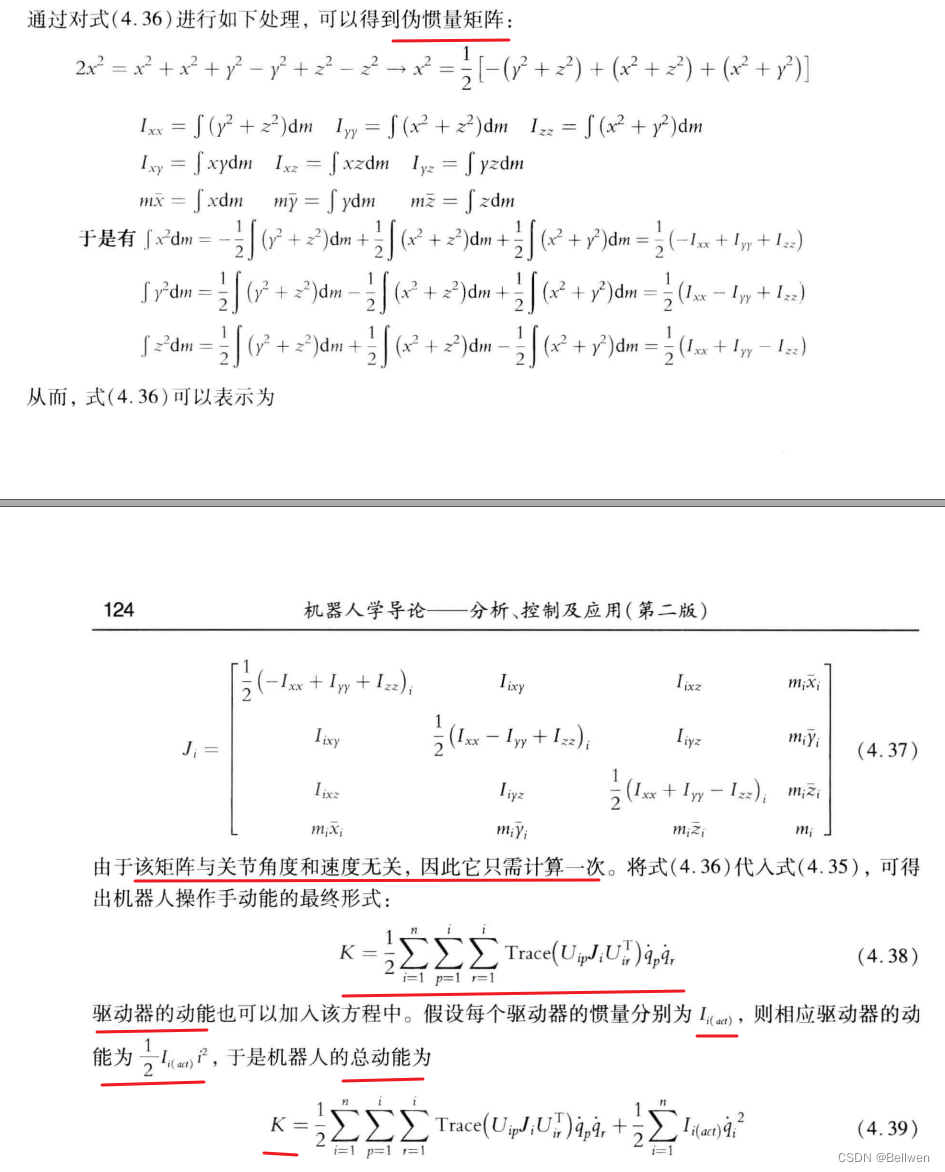
4、需要求惯量,引入了伪惯量矩阵便于表示
例题:多自由度机器人动力学方程
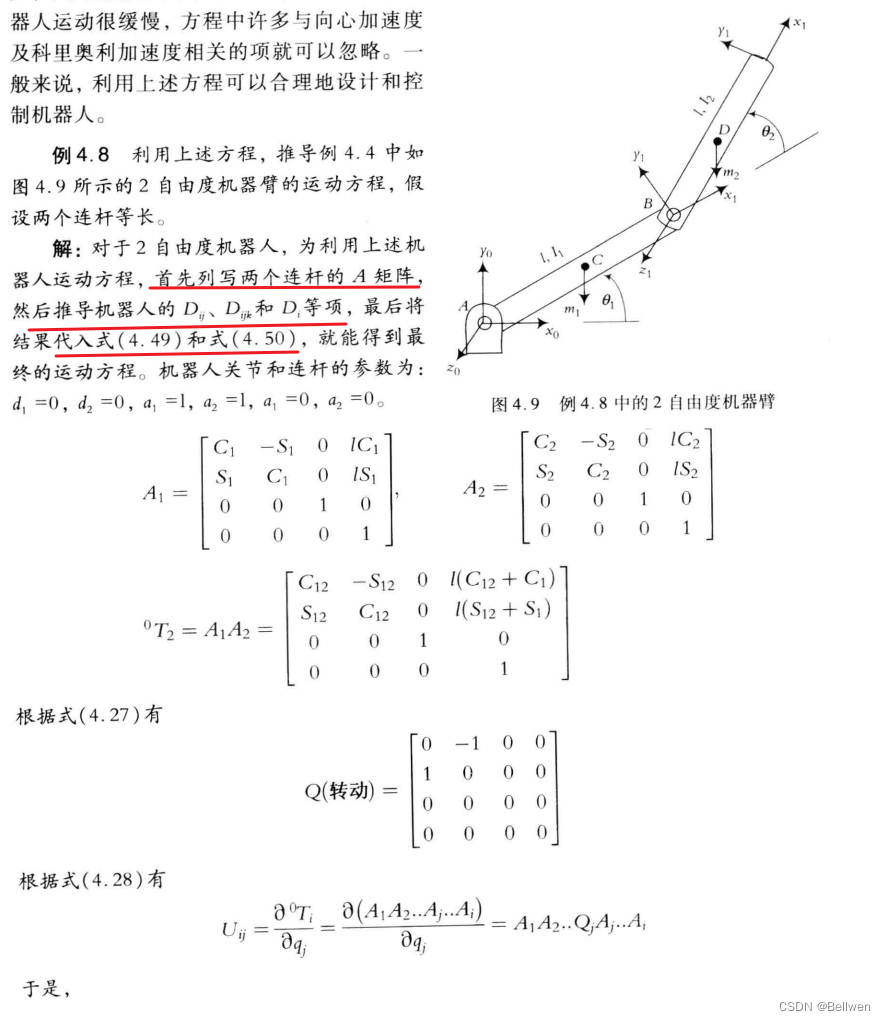

多自由度机器人的动力学方程例题解题思路:
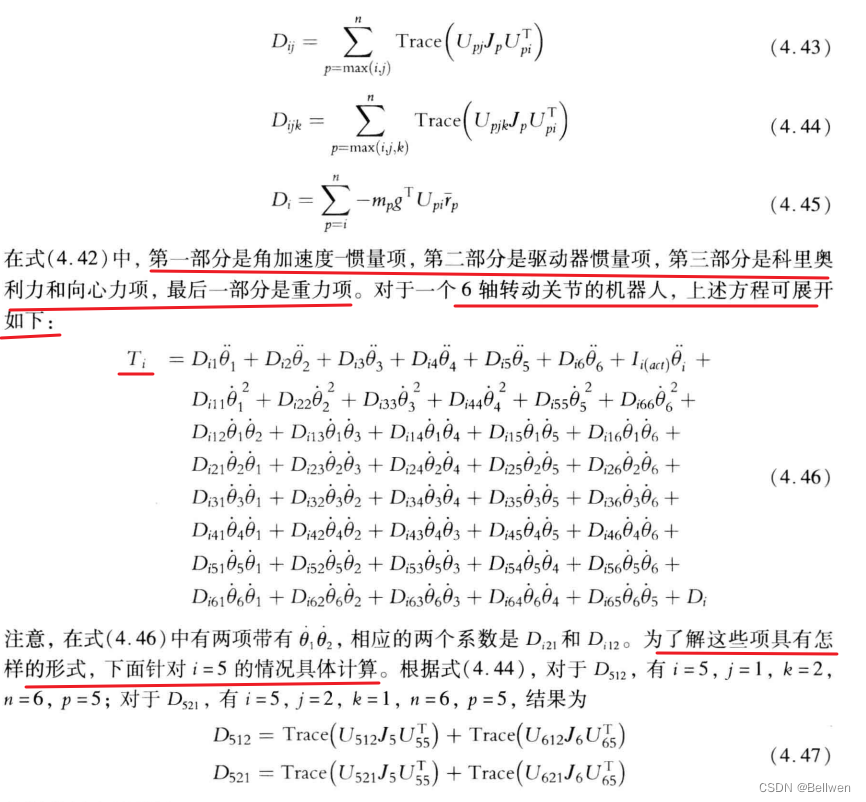
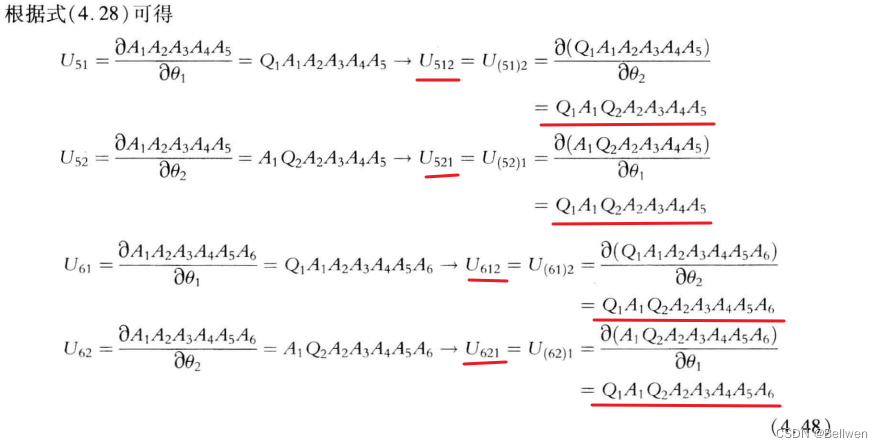
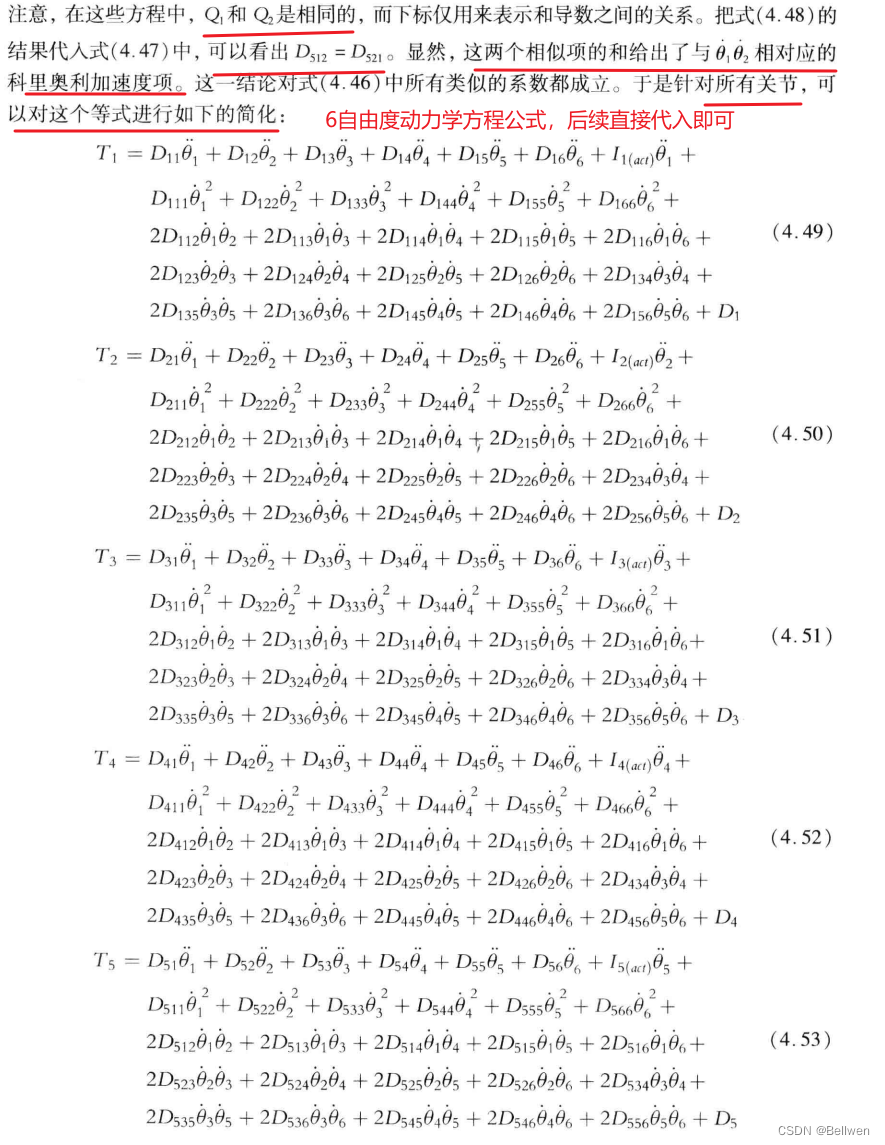
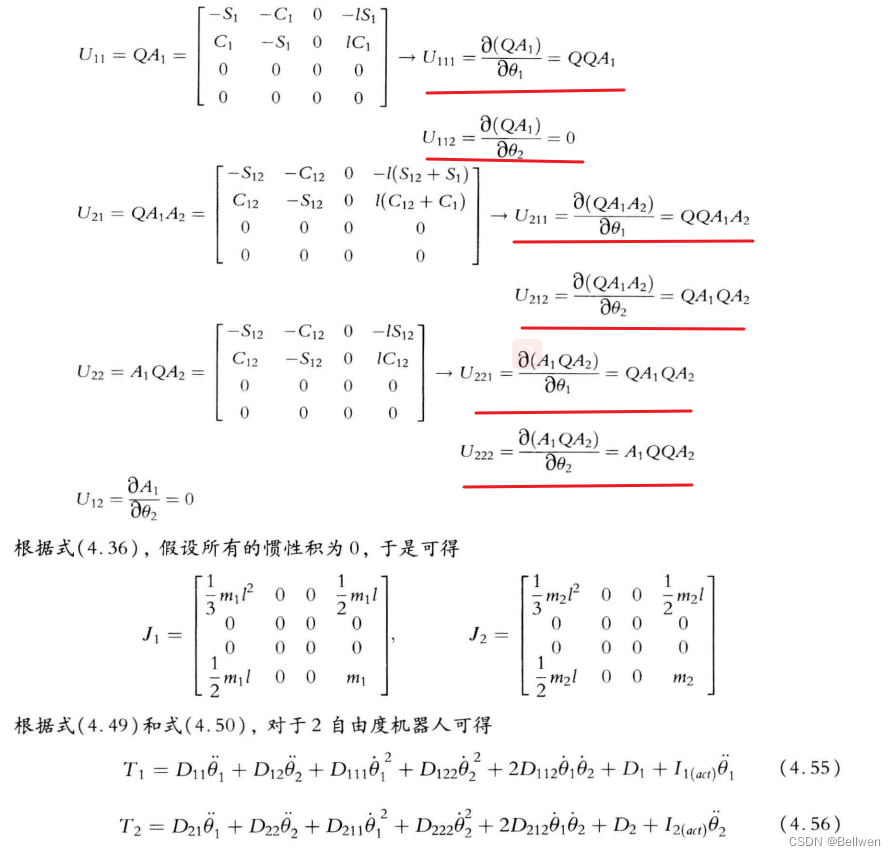
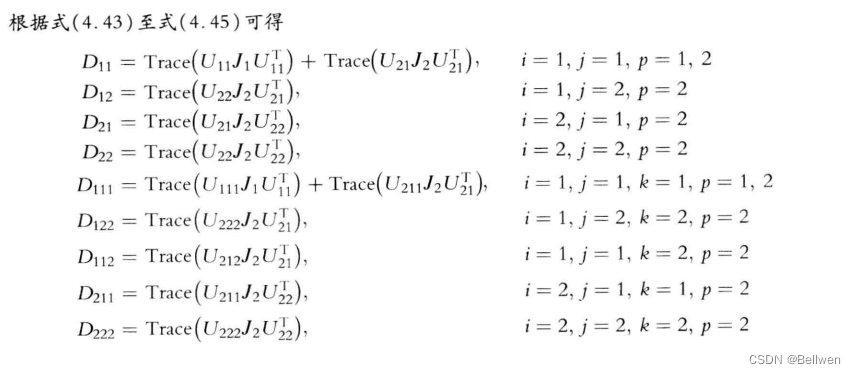
直接代入多自由度机器人动力学方程的公式,根据公式去求D,U,J,最终得到完整的动力学方程
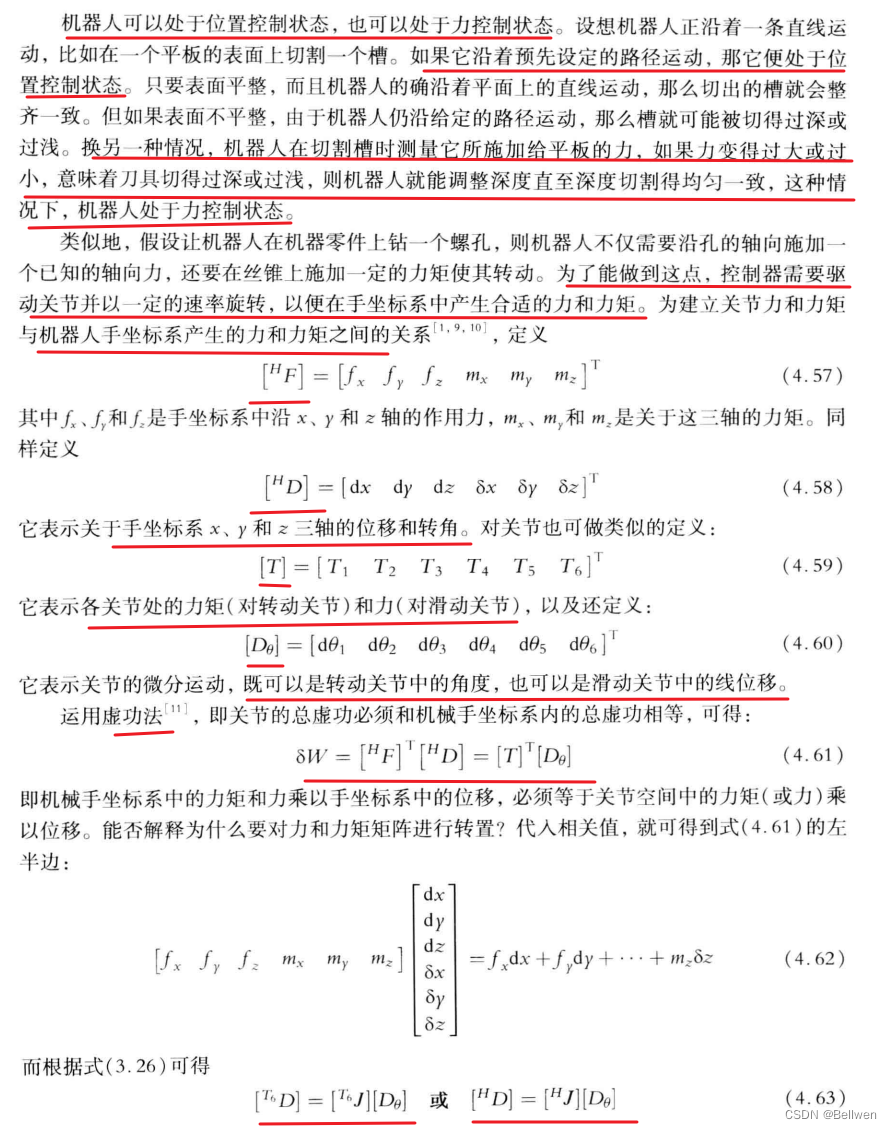
三、机器人的静力分析
例题
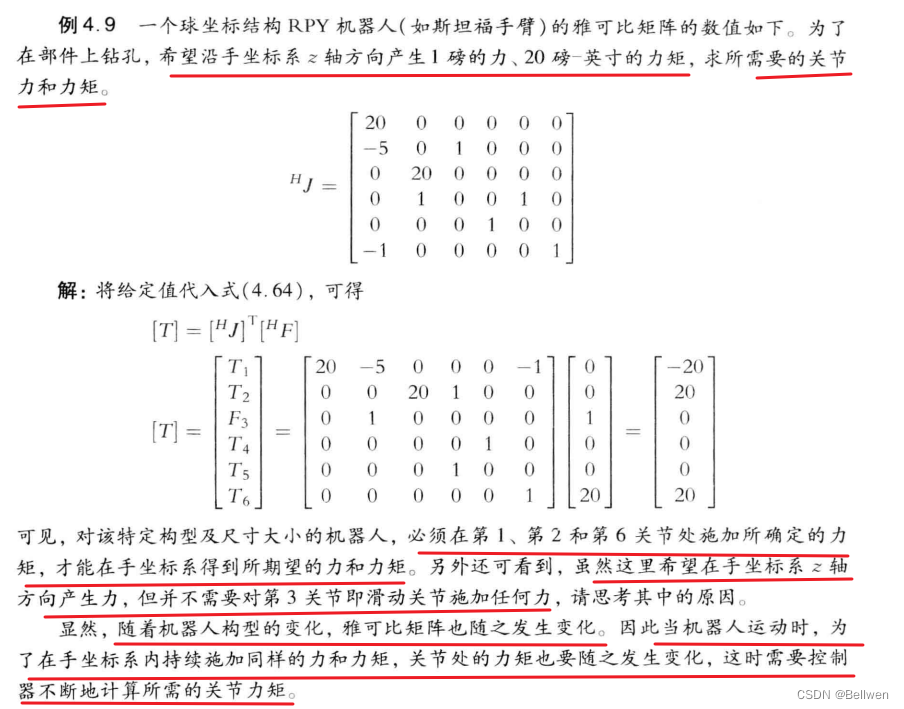
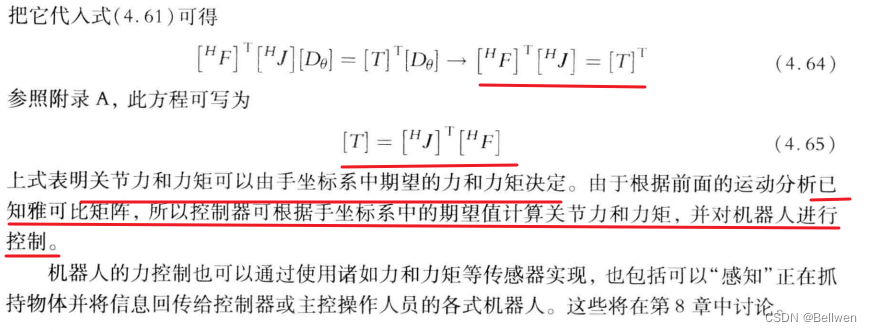
已知机器人的雅可比矩阵和期望的机器人手的力和力矩,利用上述公式即可求得,对应情况下的各关节的力矩,
以此就可以通过关节力矩来控制机器人。
因为雅可比矩阵跟机器人的构型有关,机器人的构型发生变化,雅可比矩阵也会发生变化,
所以为了实时求得关节力矩,需要实时重新计算雅可比矩阵。
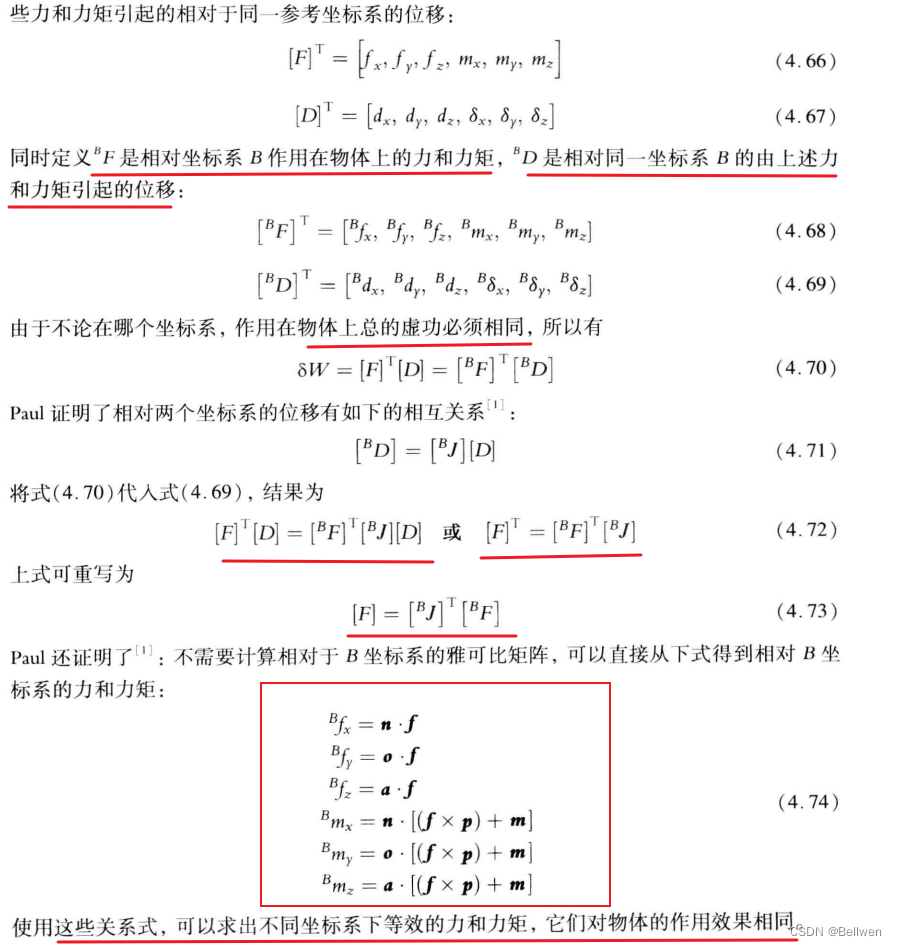
四、坐标系间力和力矩的变换

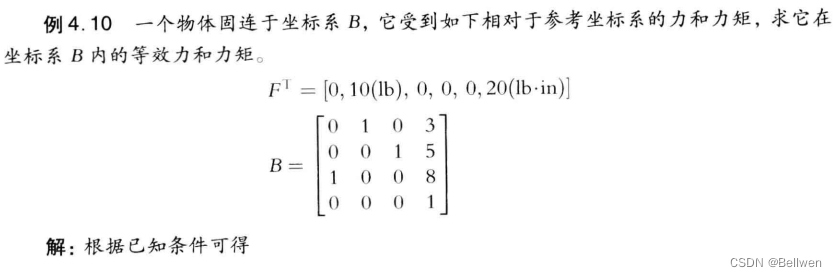
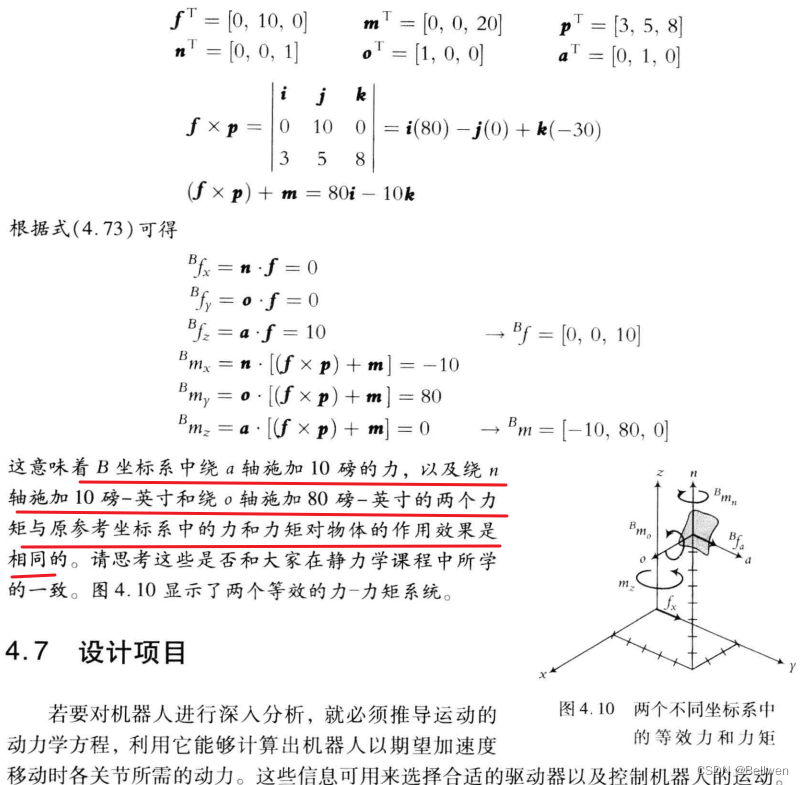
例题
—
坐标系间的力和力矩的变换可以理解为:
已知机器人手基于A坐标系下的 矩阵[ F A F_A FA],即力和力矩,
想要获得机器人手基于B坐标系下的力和力矩[ F B F_B FB],代入上述公式即可获得,力和力矩[ F B F_B FB];
即在A坐标系下机器人手的力和力矩[ F A F_A FA]和B坐标系下机器人手的力和力矩[ F B F_B FB]产生的实际效果是一样的。
总结
本章节建立动力学方程,推导动力学方程。当已知机器人的动力学方程,就可以用来估计以一定速度和加速度驱动机器人时各个关节所需的动力,也可以用来为机器人选择合适的驱动器。
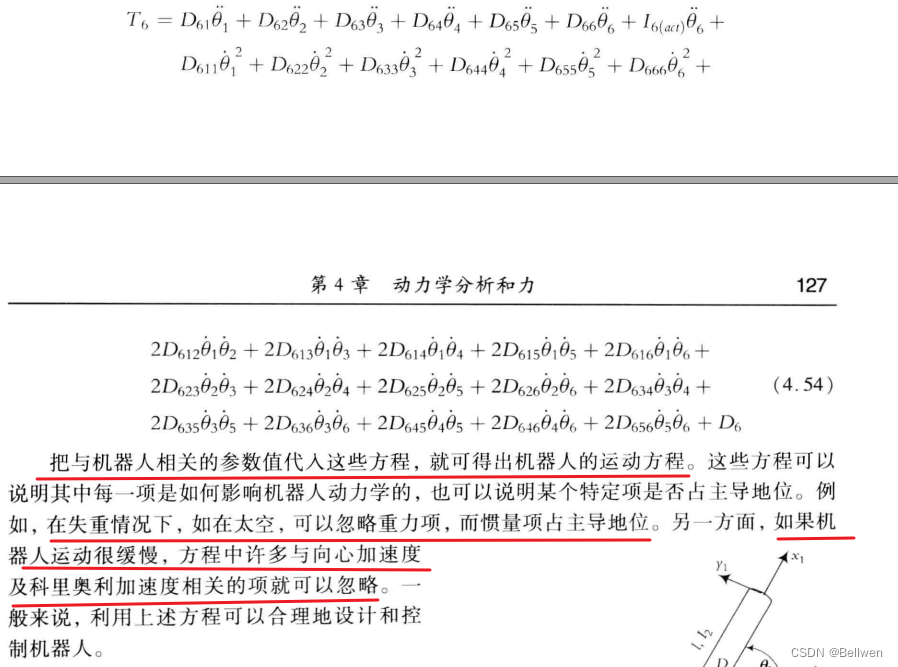
事实上,大多数情况使用的是在假设条件下的简化形式,即忽略一些不太重要的项,减少计算量;同时也可以根据所得到的动力学方程来观察得到哪一项对此机器人较为重要,通过比较各项,可以确定运动方程中某些特定项的重要性以及它们对总的所需力和力矩的影响。
例如在失重情况下,可以忽略重力项,惯量项占主导;在机器人运动很缓慢的情况下,可以忽略向心加速度项和科里奥利加速度项。
通过三章节的学习,知道了机器人的位置、速度、以及产生位置速度所需要的力和力矩,已经可以较为精准的控制末端机器人手了,可以控制机器人手去达到期望的位置和速度。
下一章节讲述在机器人能够到达所期望点的基础上,如何去平滑的产生线运动,如何轨迹规划