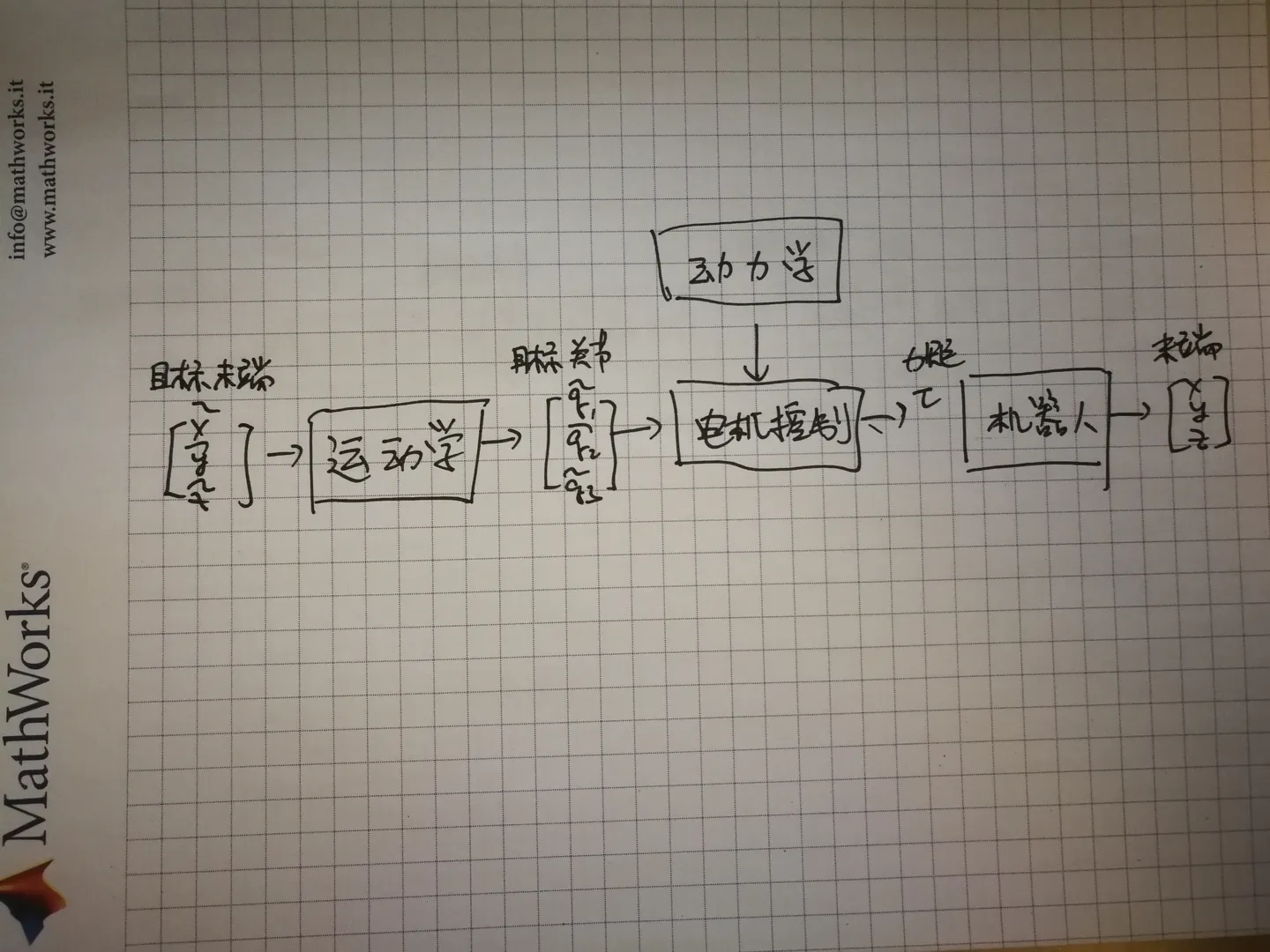
机器人运动学与动力学在控制上的区别与联系

猜你喜欢
转载自blog.csdn.net/one__leaf/article/details/131913570
今日推荐
周排行