无人驾驶实践入门——感知
计算机视觉:
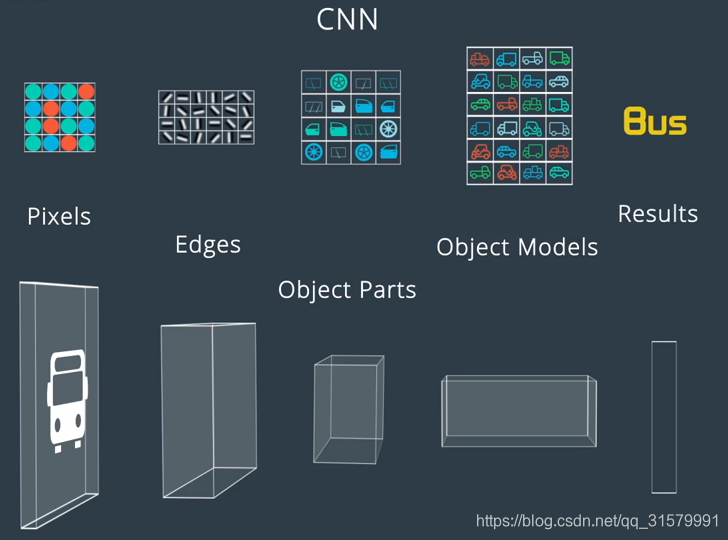
最常用CNN卷积神经网络
四个核心任务:
检测
分类
跟踪
语义分割
图像分类器:
捕获图像—>预处理—>提取特征—>分类

为了完成这些步骤,需要建立模型
摄像头图像:
最常见的计算机视觉数据
图像是一个二维矩阵,矩阵中为像素值
大多数彩色图像可由红黄蓝三种图像组成,即RGB图像含有三层图像深度
LiDAR图像:
使用激光创建环境点云图像
通过激光脉冲反射时间测量距离
点云数据可以告诉形状、纹理信息等,可用于聚类分析、对象检测、跟踪等。
机器学习
训练学习结果并保存到称为“模型”的数据结构中。
应用场景:
金融机构用来预测股票、证券交易数据
零售企业用来预测需求
医生用来辅助医疗诊断
分类:
监督学习,标记数据
无监督学习,无标记数据
半监督学习,少量标记数据
强化学习,使用多种模型训练数据,提供奖励机制
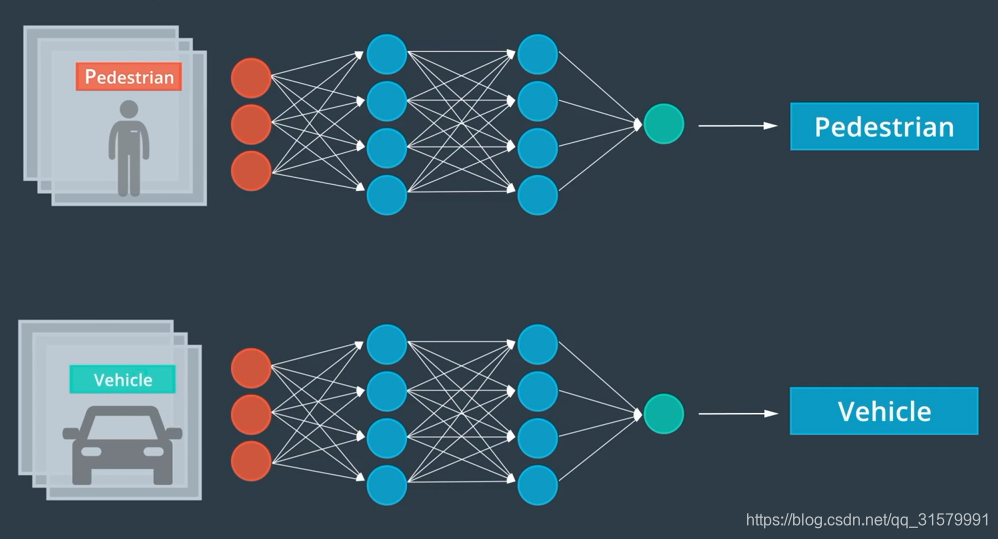
人工神经网络
工作原理:
将人工神经元连接起来形成神经网络,通过机器学习进行训练模仿人脑工作
提取特征并调整权值
实现步骤:
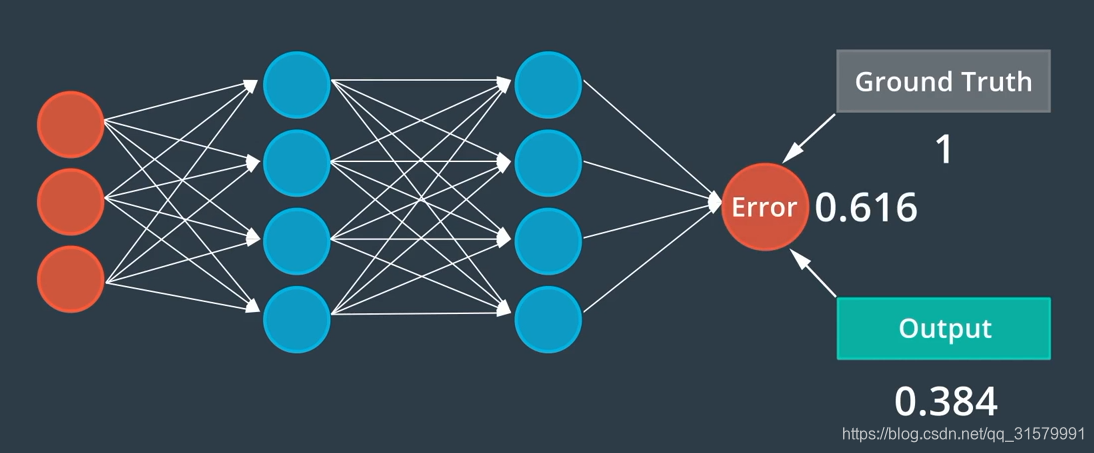
前馈
误差测定
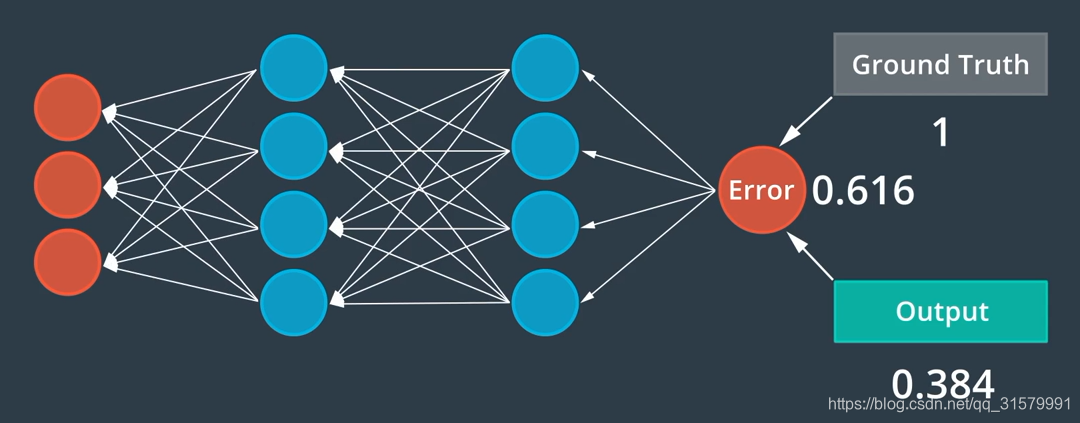
反向传播
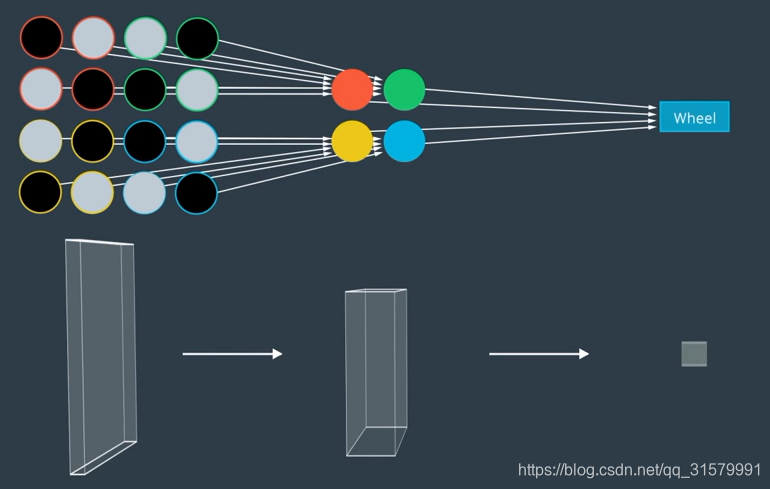
卷积神经网络(CNN):
特点:
对感知问题有效
多维输入
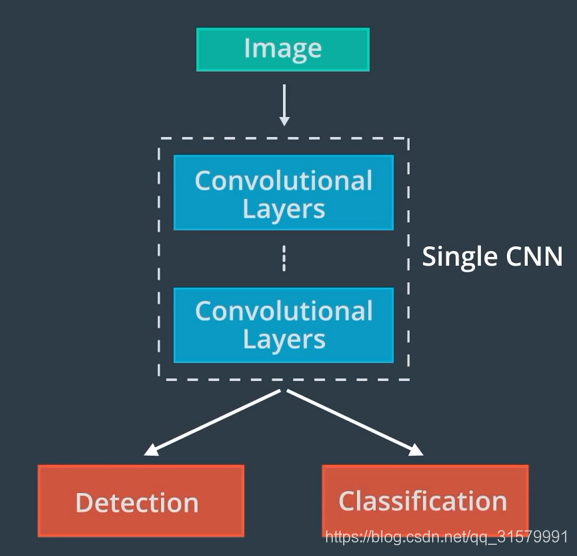
检测与分类
检测算法:
CNN定位对象
CNN分类
经典体系R-CNN
跟踪
检测失败时解决遮挡问题,保留对象内容
步骤:
特征匹配---->确定对象---->预测
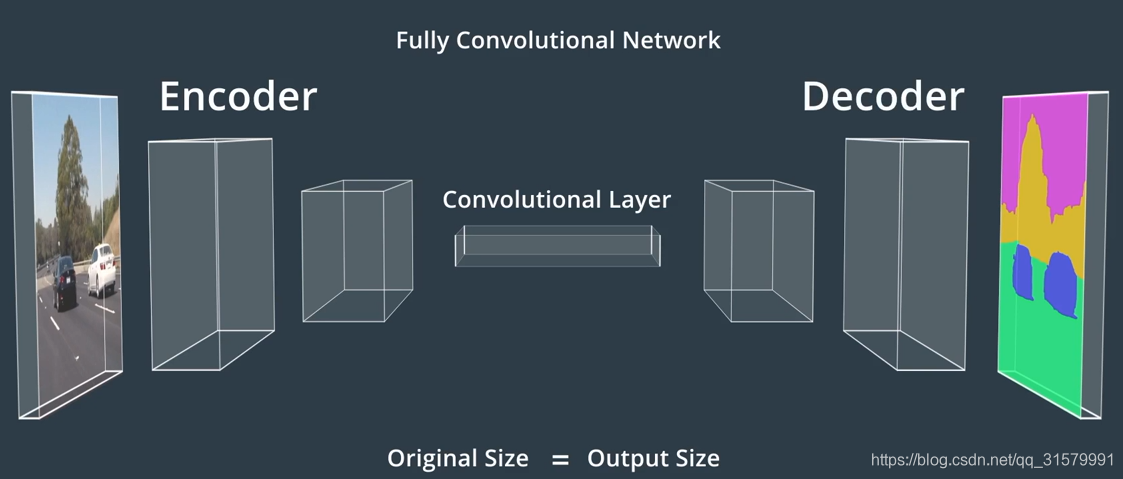
语义分割
依赖于特殊CNN,即FCN(全卷积网络)
即在原始CNN后续加入解码部分
Apollo感知
ROI感知数据,应用于点云和图像
通过检测网络馈送已过滤的点云
使用检测跟踪关联的算法识别对象
使用高精度地图判断交通灯,检测网络进行定位,提取特征后交付分类网络来判断颜色
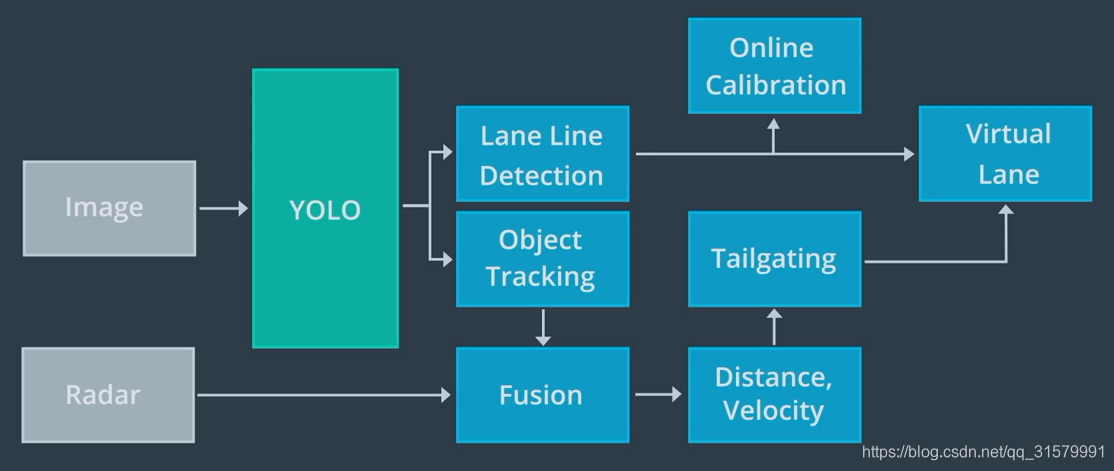
YOLO网络检测车道线和动态物体,在线监测模块对预测进行调整
感知数据比较

卡尔曼滤波
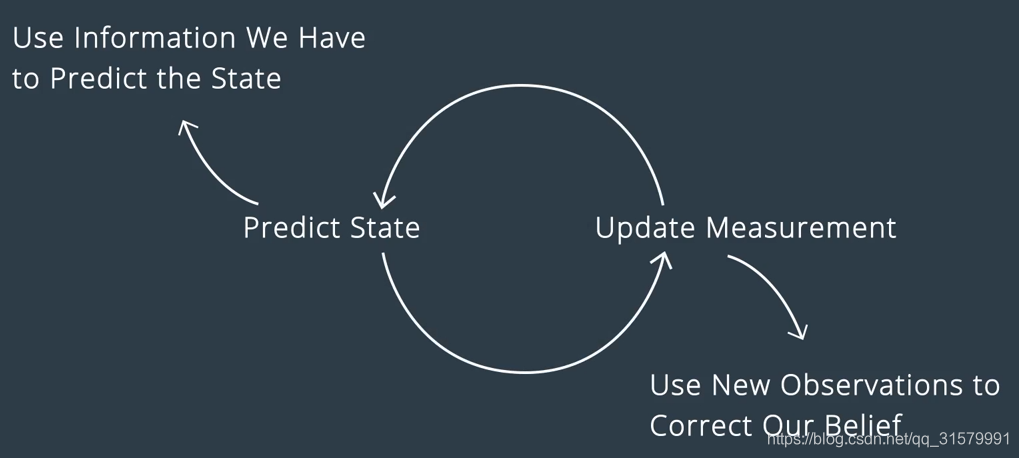
分别有同步融合和异步融合两种传感器数据处理方式