1.引言
模型预测控制是目前控制领域研究的热点,本文将简要介绍模型预测控制的基本概念、特点、研究范围,并推导基于状态空间方程的控制量模型预测控制、控制增量模型预测控制的数学公式。
2.模型预测控制概念
模型预测控制(Model Predictive Control ,以下简称为MPC)通过模型预测进行优化控制。MPC通过构建如下所示的优化问题,并通过优化算法进行求解。
模型预测控制问题一般形式如下:
2.1模型预测控制三要素
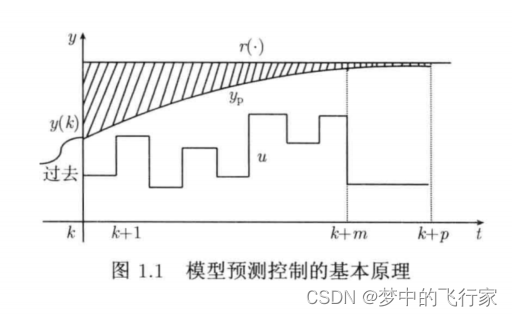
模型预测控制有三个要素:模型预测、滚动优化、前馈-反馈控制结构
①模型预测
通过预测模型得到未来一段时间内的系统输出预测值。常见的预测模型有阶跃响应模型、脉冲模型、状态空间模型、传递函数模型、模糊模型、人工神经网络模型、混沌模型等
②滚动优化
每个控制周期均通过求解优化问题得出一个控制序列,但并非将整个序列作用于系统,而是只将控制序列的首元素作用于系统,每个控制周期重复此过程,因此MPC又称滚动时域控制(MHC:Moving Horizon Control)。由于MPC的预测时域有限,往往求出的是次优解,但是滚动优化的过程可以减小模型失配、时变、干扰等带来的负面影响,因此在复杂的工业环境中要比建立在理想条件下的罪有控制更加实际有效。
③前馈-反馈控制结构
控制序列的输出基于预测时域内的期望输出和当前状态,即前馈和反馈。例如,基于状态空间模型的增量式无约束模型预测控制的控制增量序列为

R(k+1)为预测时域内的期望输出,Δx(k)为当前时刻的状态增量,Δd(k)为当前时刻的可测干扰增量。
2.2 模型预测控制特点
①控制序列局部最优、全局次优
②相较于PID算法,利用了预测时域内的期望输出,能对期望输出的变化做出更快的响应
③对于MIMO、非线性系统具有良好的适用性
④由于将控制问题转化为优化问题(通常为二次规划问题),因此在处理约束条件时具有先天优势
2.3 模型预测控制的研究范围
①对现有基本算法进行修正。如引入扰动观测器,变反馈矫正系数等;
②单变量到多变量的推广。把只适合于稳定对象的算法推广到非子恒系统,把预测控制的应用范围推广到非线性即分布参数系统;
③优化目标函数的选取。如采用最小方差的目标函数、二范数的目标函数、无穷范数的目标函数等;
④预测模型的选取。尤其时在非线性预测控制系统中,非线性预测控制比线性预测控制复杂的多。因而,目前研究主要集中在特殊的非线性模型,如Wiener模型、Bilinear模型、广义Hammerstein模型、Volterra模型等。
⑤引入大系统方法,实现递阶或分散的控制算法。
⑥将基本控制算法与先进的控制思想与结构相结合,如自适应预测控制、模糊预测控制、鲁棒预测控制、神经网络预测控制等。
3 基于状态空间方程的增量式模型预测控制
3.1 预测模型
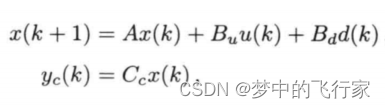
设某一系统的离散状态空间方程为
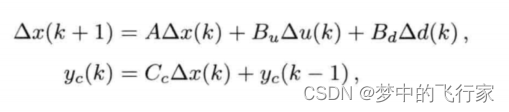
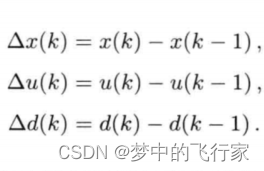
将其改写为增量形式:
其中
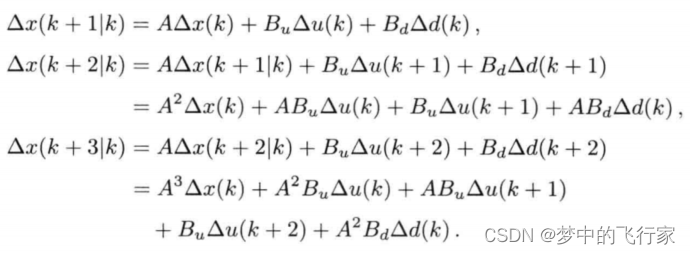
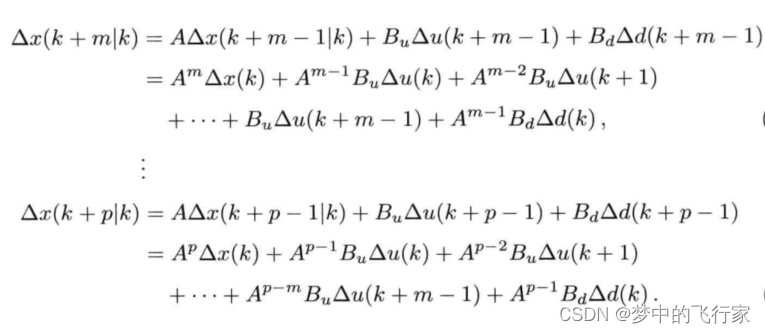
设预测时域为p,控制时域为m,则预测时域的状态增量如下:
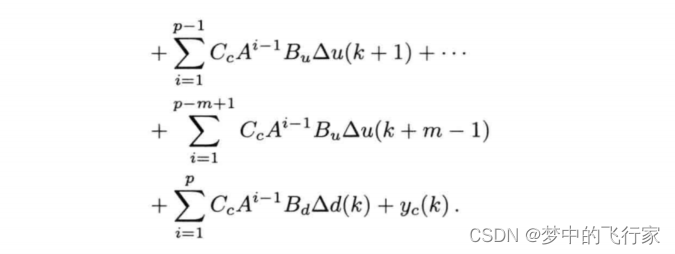
预测时域内的输出如下:

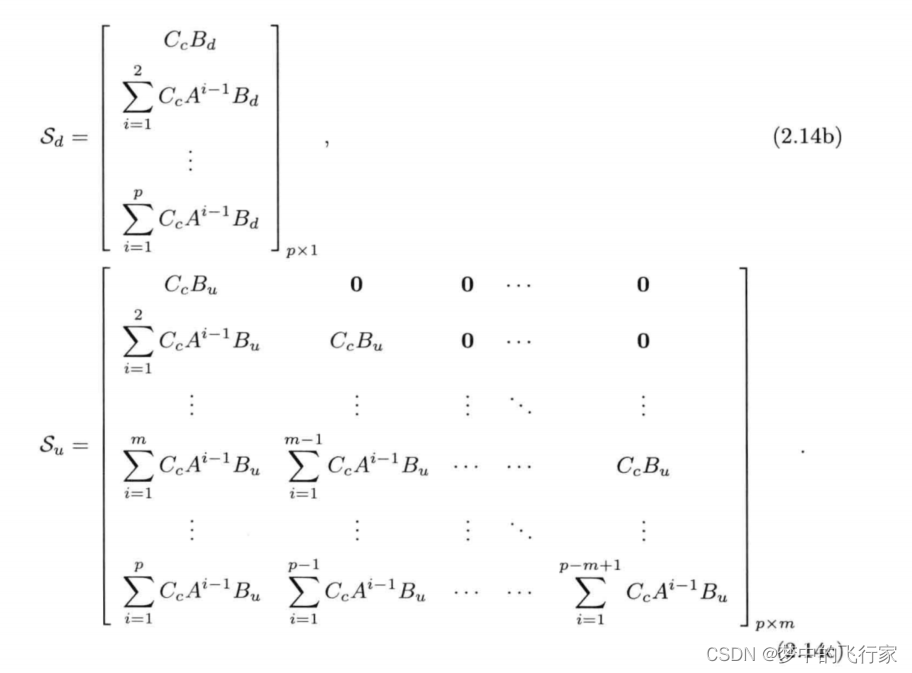
令

将预测时域内的输出改写为矩阵形式,从输出矩阵可知,预测时域内的输出由当前时刻的状态增量、输出、扰动增量以及控制时域内的控制增量综合决定,其中当前时刻的状态增量、输出、扰动增量由传感器或状态观测器得到,改变控制时域内的控制量即可改变系统的输出。

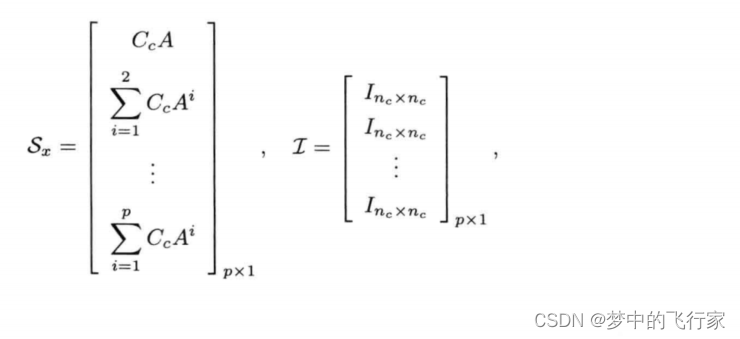
其中
3.2 优化目标函数及求解
综合考虑控制量的平滑性和输出量的误差构建优化函数,并满足控制增量、控制量和输出量的约束条件。



参考文献
1.《模型预测控制》陈虹
2.[模型预测控制](https://wenku.baidu.com/view/64b325074835eefdc8d376eeaeaad1f3469311d5?fr=uc)
3.[先进控制技术-模型预测控制](https://wenku.baidu.com/view/729d75d8adaad1f34693daef5ef7ba0d4a736dd5?fr=uc)
4.[B站 Dr_CAN 模型预测控制](https://www.bilibili.com/video/BV1cL411n7KV?spm_id_from=333.337.search-card.all.click)