源自:《无人驾驶无人驾驶车辆模型预测控制》——龚建伟
1.基本原理
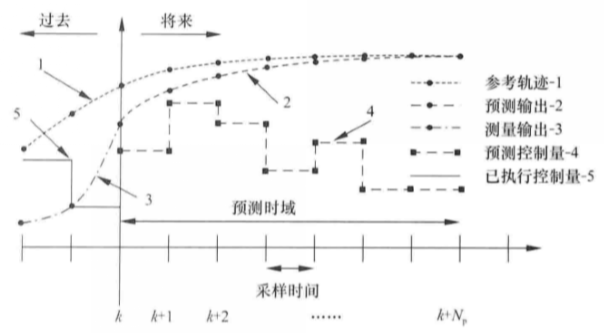
已知(输入):一条期望参考轨迹;当前k时刻的测量值;
设计:预测模型
目标:预测未来一段时域内[k,k+Np],系统的输出
方法:对这段时域内施加一系列控制序列4(k+1时刻的值为实际控制量)
总结起来就是:预测模型;滚动优化;反馈校正
2.控制原理框图
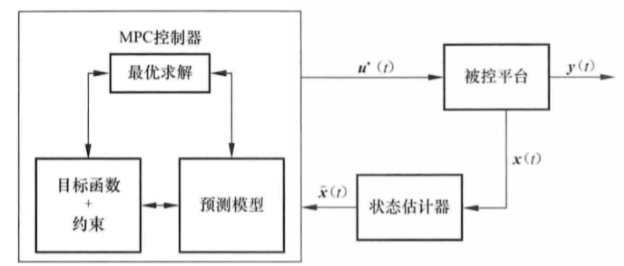
控制过程:
- 预测模型+目标函数+约束条件——>最优控制序列——>被控平台
- 被控平台响应
- 获取状态观测值x(t)——>状态估计器(卡尔曼滤波器、粒子滤波等)——>回到第一步,循环
3.常用模型
3.1 动态矩阵控制DMC
3.2 模型算法控制MAC
3.3 广义预测控制GPC