文章目录
0 笔记说明
来源于【机器学习】【白板推导系列】【合集 1~23】,我在学习时会跟着up主一起在纸上推导,博客内容为对笔记的二次书面整理,根据自身学习需要,我可能会增加必要内容。
注意:本笔记主要是为了方便自己日后复习学习,而且确实是本人亲手一个字一个公式手打,如果遇到复杂公式,由于未学习LaTeX,我会上传手写图片代替(手机相机可能会拍的不太清楚,但是我会尽可能使内容完整可见),因此我将博客标记为【原创】,若您觉得不妥可以私信我,我会根据您的回复判断是否将博客设置为仅自己可见或其他,谢谢!
本博客为(系列五)的笔记,对应的视频是:【(系列五) 降维1-背景】、【(系列五) 降维2-样本均值&样本方差矩阵】、【(系列五) 降维3-PCA-最大投影方差】、【(系列五) 降维4-PCA-最小重构代价】、【(系列五) 降维5-SVD角度开看PCA和PCoA】、【(系列五) 降维6-主成分分析(PCA)-概率角度(Probabilistic PCA)】。
下面开始即为正文。
1 背景
降维是解决过拟合问题的方法之一。输入数据x的维度p过大会导致维数灾难,会造成数据稀疏等问题。降维有三种类型:
① 直接降维,如特征选择;
② 线性降维,如PCA(Principal component analysis,主成分分析),MDS(MultiDimensional Scaling,多维尺度变换);
③ 非线性降维,如ISOMAP(Isometric Mapping,等距特征映射),LLE(locally linear embedding,局部线性嵌入降维算法)。
下面先讨论样本均值与样本方差矩阵。
数据集D中有N个样本实例,D = {(x1, y1), (x2, y2),…,(xN, yN)}。现在构造矩阵X = (x1,x2,…,xN)T,每个样本xi∈Rp,i=1…N,X为N×p阶矩阵。构造N×1矩阵1N=(1,1,…,1)T,ⅠN为N×N单位矩阵。
1.1 样本均值
样本均值(是p×1的向量)为:

注意最右面是N×1矩阵1N=(1,1,…,1)T。
1.2 样本协方差矩阵
样本协方差矩阵(是p×p的矩阵)为:
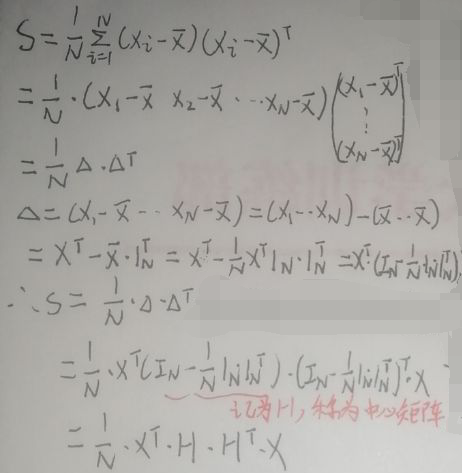
对于上图的矩阵H=ⅠN-1/N·1N·1NT,经过验证,HT=H,H=H2=H3=…Hn。因此S=1/N·XT·H·HT·X=1/N·XT·H·H·X=1/N·XT·H2·X=1/N·XT·H·X。
最后,样本协方差矩阵为S=1/N·XT·H·X。
2 主成分分析PCA
PCA先重构原始特征空间,之后从p维特征中选出q维特征(p≥q)。PCA的思想可以总结为——“一个中心,两个基本点”:
(1)一个中心:对原始特征空间重构;
(2)两个基本点:最大投影方差与最小重构距离。
2.1 最大投影方差
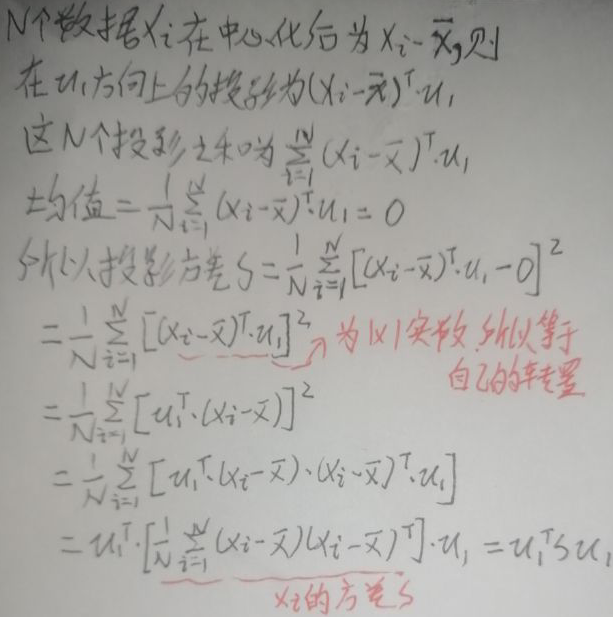
为方便计算,首先是中心化,将所有数据xi平移到以原点为中心的区域,变为xi-x杠,x杠是所有xi的均值。先看看投影长度Δ(下图中提到的投影均是投影长度,是标量)怎么求:
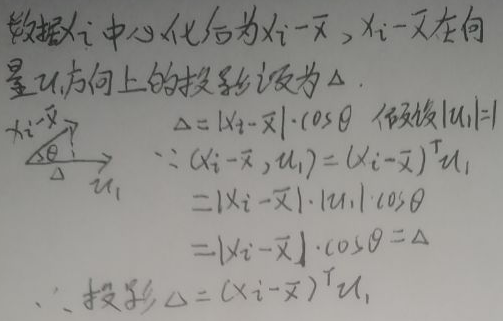
数据xi∈Rp,而PCA对原始特征空间重构,所以重构后的空间也应该是p维的,设这个p维空间的一组基为(u1,u2,…up),且||ui||=1,i=1…p。以p=2为例:
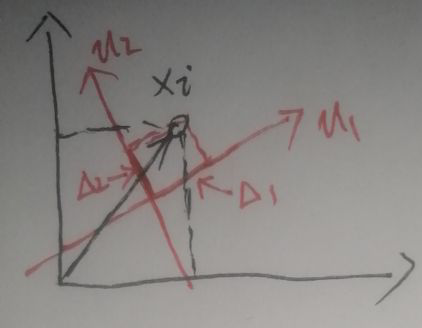
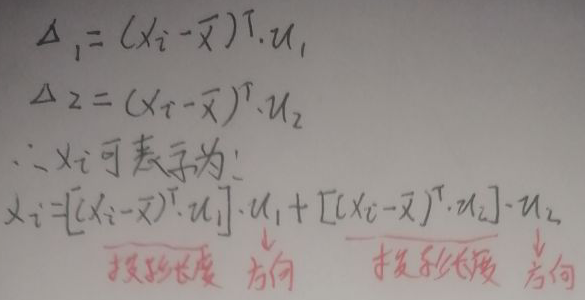
上图中,黑色坐标轴为原始空间,红色坐标轴为重构后的空间。假设xi在上图的位置,在重构空间的坐标轴u1、u2上的投影长度分别为Δ1、Δ2。根据本节第一张图,Δ1、Δ2为:
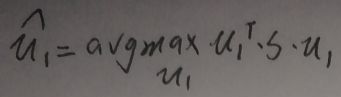
上图最后一行实质是坐标变换。先看一个方向上的情况,这里以u1方向为例(||u1||=1):
此时转变为最优化问题:
使用拉格朗日乘数法(我不太了解这种方法,我只是按up主说的写的而已,您可以看百度百科)——构造L(u1,λ),注意||u1||=1=u1T·u1:
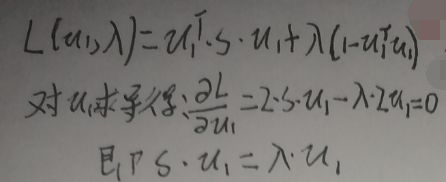
是不是很熟悉,S为样本的协方差矩阵,是p×p的矩阵,这样不就是特征值与特征向量吗?——u1为矩阵S对应于λ的单位特征向量。
那么新的重构空间的基就是样本的协方差矩阵的p个单位特征向量u1,u2,…up。
这真是太巧了,太棒了!
2.2 最小重构距离
样本xi重构后为:
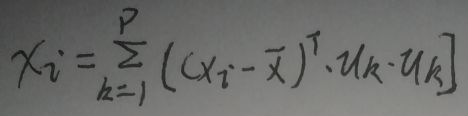
再从p维特征向量中选择q维特征向量(p≥q)后为:

定义N个数据xi在q个维度上的代价距离为J:
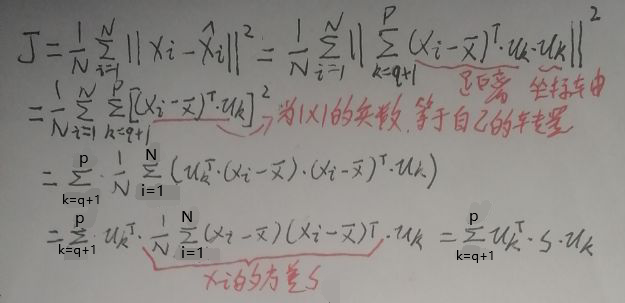
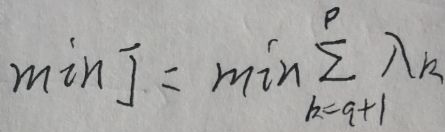
现在要求的就是最小重构距离【min J】,因为重构后的p维空间的一组基为(u1,u2,…up),且||uk||=ukTuk=1,k=1…p,所以u1,u2,…up之间是线性无关的,而且两两之间正交,因此可以分别单独求每一个ukT·S·uk的最小值,k=q+1,q+2,…p,最后将每一个最小值相加就是J的最小值。与【2.1 最大投影方差】一节的倒数第二张图片类似,只不过应该将max改为min,通过拉格朗日乘数法得到的结果也是类似的——【S·uk=λ·uk】,k=q+1,q+2,…p,在等式两边同左乘ukT得到【ukT·S·uk=λ·ukT·uk】,因为||uk||=ukTuk=1,所以【ukT·S·uk=λ】。注意到要求的是【每一个ukT·S·uk的最小值】,而λ是协方差矩阵S的特征值,那么取其最小的p-q个特征值求和便是J的最小值。若将p个特征值从大到小排列,就是取从k=q+1到第p个特征值,即最小重构距离min J为:
2.3 总结
PCA的步骤:
(1)拿到N个样本xi后,构建矩阵X = (x1,x2,…,xN)T,每个样本xi∈Rp,i=1…N,X为N×p阶矩阵。构造N×1矩阵1N=(1,1,…,1)T,ⅠN为N×N单位矩阵。构建矩阵H=ⅠN-1/N·1N·1NT,根据【1.2 样本协方差矩阵】一节最后一行文字可得协方差矩阵(是p×p的哦)为S=1/N·XT·H·X。求矩阵特征值与特征向量时与系数无关,所以去掉系数1/N,使S=XT·H·X。因为协方差矩阵为对称矩阵,所以ST=S。对S做特征分解(也称为谱分解),即S=UΛUT,其中U为正交矩阵即UTU=UUT=ⅠN,Λ是由S的p个特征值λi组成的矩阵,即Λ=diag(λ1,λ2,…,λp),且λ1>λ2>…>λp,则U的列向量从左到右依次为S的对应于λi的单位特征向量ui,从这p个特征向量中挑选q个(q≤p),便称为PCA的主成分。
(2)将X中心化后的HX在主成分即q个方向上投影,即可求得对应坐标矩阵为HXV:
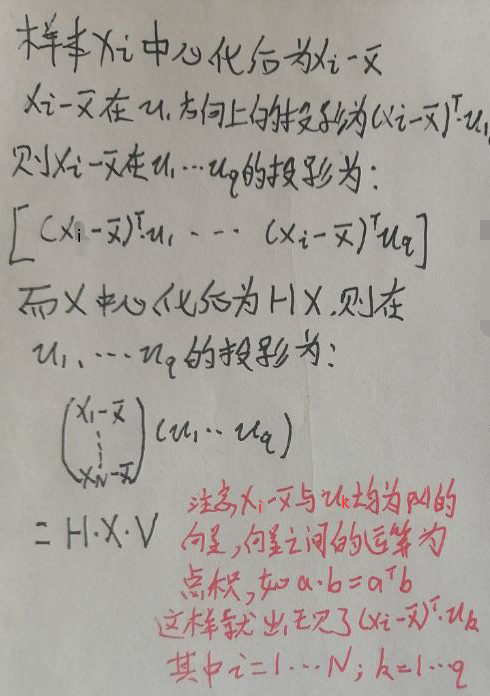
其中V是由挑出的q个特征向量组成的p×q矩阵,HXV为N×N×N×p×p×q=N×q的矩阵,而原来的X是N×p的,这里q≤p,这样就达到降维的目的。坐标矩阵HXV的行向量为N个降维后的样本,每个样本被降维为q维向量。
3 SVD分解HX
由N个样本xi构建的矩阵X = (x1,x2,…,xN)T,为N×p阶矩阵,且每个样本xi∈Rp,i=1…N。将X中心化后变为:
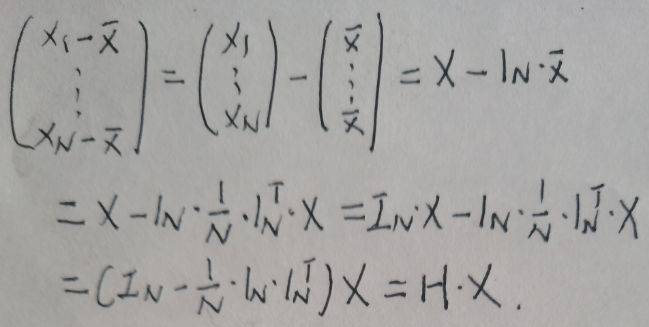
对H·X进行奇异值分解(SVD)得到:H·X=UΣVT,U为N×N的矩阵,V为p×p的矩阵,U和V均为正交矩阵,即UTU=UUT=ⅠN,VTV=VVT=Ⅰp。令【Δ1=(H·X)·(H·X)T,Δ2=(H·X)T·(H·X)】,矩阵Δ1和Δ2的正特征值的个数与大小均是完全相同的。Σ是N×p的矩阵,该矩阵在aii,即行数与列数相同的元素为上述正特征值的正平方根,并且从左到右按从大到小排列着。
对【2.3 总结】一节得到的坐标矩阵HXV=UΣVTV=UΣ。
因为S=1/N·XT·H·X,HT=H,H=H2=H3=…Hn,所以S=1/N·XT·HT·H·X。又因为求矩阵特征值与特征向量时与系数无关,所以去掉系数1/N,使S=XT·HT·H·X。代入H·X=UΣVT得:S=(UΣVT)TUΣVT=VΣTUTUΣVT,因为UTU=UUT=ⅠN,所以S=VΣTΣVT,其中ΣTΣ为p×p的矩阵,除对角线元素外均为0,对角线上的非零元素为矩阵Δ1和Δ2的正特征值。这样就不用专门求协方差矩阵S,通过运算就能得到S:① 对X中心化后变为H·X;② 对H·X进行SVD分解:H·X=UΣVT;③ S=VΣTΣVT。最后就得到协方差矩阵S了。
4 主坐标分析PCoA
主坐标分析(Principal Co-ordinates Analysis,PCoA)是这样的:先构造T=H·X·XT·H=H·X·XT·HT,则T=UΣVT·(UΣVT)T=UΣVT·VΣTUT=UΣΣTUT,即T=UΣΣTUT,等式两边同右乘UΣ得:TUΣ=UΣΣTUTUΣ=UΣΣTΣ,即TUΣ=UΣΣTΣ,其中ΣTΣ是由T的特征值组成的对角矩阵,UΣ由ΣTΣ的对角线元素即T的特征值对应的特征向量组成。
也就是说,对PCoA构造的T进行特征分解(或称谱分解)可直接得到坐标矩阵UΣ,由T的特征值对应的特征向量组成。
同时,要注意到S是p×p的矩阵,T是N×N的矩阵。当维度p很高时,求S就比较困难,可以转而使用PCoA的T矩阵。
5 概率主成分分析PPCA
概率主成分分析PPCA(Probabilitic PCA)是从概率角度出发的PCA。
将原始数据(也称为observed data,即可观测数据)xi∈Rp降维到zi∈Rq(zi称为latent data,即潜数据)。zi与xi均为连续型向量。
PPCA有三点假设:① 潜数据z~N(0,Ⅰq),其中0是q×1的向量,Ⅰq是q×q的单位矩阵;② 噪声ε~N(0,δ2·Ⅰp),其中0是p×1的向量,δ2·Ⅰp是对角线上元素都是δ2的对角矩阵,是p×p的矩阵,注意ε与z相互独立;③ 可观测数据x=w·z+μ+ε,w是p×q的矩阵,μ为常数。因为可观测数据与潜数据之间是线性关系,所以这也是一个线性高斯模型。PPCA的核心问题是要求P(z|x)的大小。分三步:① 求x|z的分布;② 求x的分布;③ 求z|x的分布。下面是PPCA的概率图模型(不懂没关系,因为我也不懂):
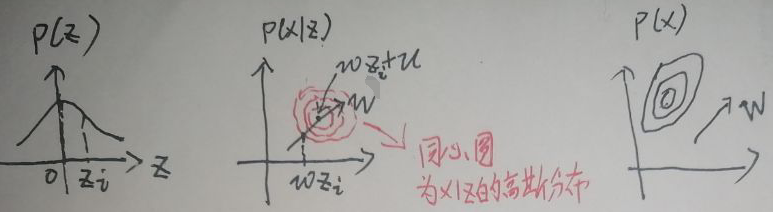
5.1 求x|z的分布
此时视z为常数,z~N(0,Ⅰq),ε~N(0,δ2·Ⅰp),所以期望E(x|z)=E(w·z+μ+ε)=w·z+μ+E(ε)=w·z+μ+0=w·z+μ;方差Var(x|z)=Var(w·z+μ+ε)=Var(ε)=δ2·Ⅰp。
因此x|z的分布为x|z~N(E(x|z),Var(x|z))=N(w·z+μ,δ2·Ⅰp)。
5.2 求x的分布
此时视z为变量,期望E(x)=E(w·z+μ+ε)=w·E(z)+μ+E(ε)=μ;方差Var(x)=Var(w·z+μ+ε)=wVar(z)wT+Var(ε)=wⅠqwT+δ2·Ⅰp=wwT+δ2·Ⅰp。
因此x的分布为x~N(E(x),Var(x))=N(μ,wwT+δ2·Ⅰp)。
5.3 求z|x的分布
使用可观测数据x与潜数据z去构造(x,z)T,则(x,z)T的分布为:
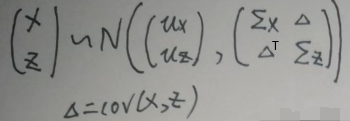
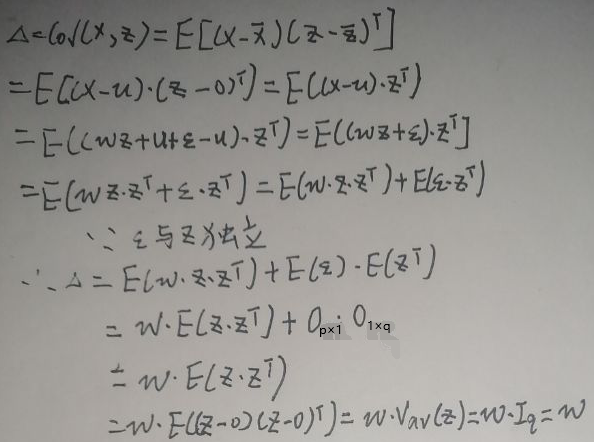
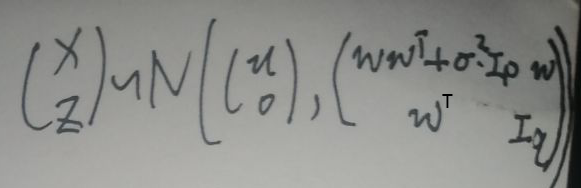
其中μx=μ,μz=0,Σx=wwT+δ2·Ⅰp,Σx=Ⅰq,现在求Δ=cov(x,z):
综上所述,构造的(x,z)T的分布为:
之后会用到机器学习-白板推导-系列(二)笔记:高斯分布与概率中【5 边缘概率与条件概率的求解】一整节的内容,疑惑的时候先去看相关内容。
首先将x看作上面提到的博客那一节的xa,将z看作xb,根据最后一张图片的倒数第二行便可以求出z|x的分布,这里就不详细展开了。
END