矩阵的乘法有3种不同的方法去解释它们的意义,而这三种方法都是等效的。
分别是: 坐标空间的变换 跃迁运动 方法乘以对象
引子:
二维平面上有A、B两个点。
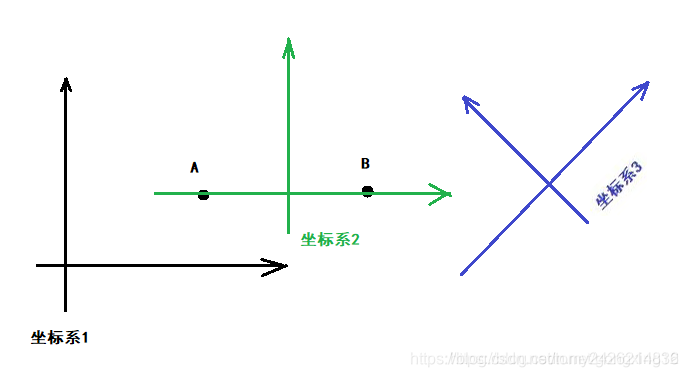
很明显,对于这两个点,我们可以任意建立坐标系;而不同的坐标系下A、B 具有不同的坐标值。
一、坐标空间的变换
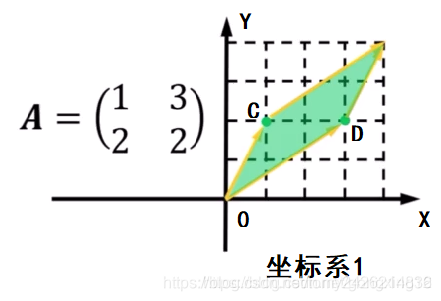
现在,坐标系1中有C(1,2)、D(3,2)两个点,可以将它们在坐标系中可视化表示出来,就是矩阵A。
现在,我们在这个坐标系1的左下角以(-3, -1) 处为原点,x、y轴方向与原坐标系相同建立新的坐标系2,那么在新的坐标系2中
原来的C、D的新坐标是多少呢? 新的矩阵是多少呢?
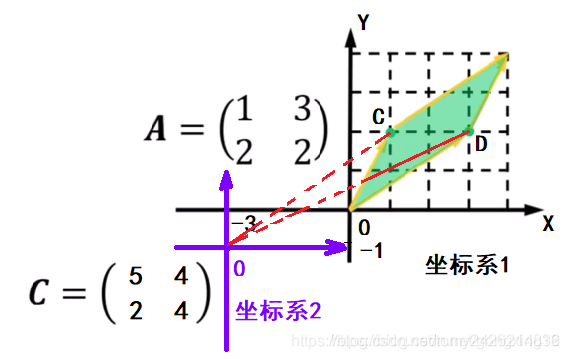
新的坐标原点在原来的(-3,-1),易算出原来的C、D新坐标是C(5,2)、D(4,4),新的矩阵表示为。
那么,这个过程中做了怎样的变换呢?
C、D两个点位置没有动,我们变换了坐标系,则C、D表示形式发生了变化。

也就是说,我们左乘矩阵B,就相当于将坐标系左移3个单位再下移1个单位后,在新的坐标系中的表示方法。
因此,矩阵的乘法就相当于一种坐标系空间的变换。
二、跃迁运动
我们对于一个矩阵A 在坐标系中可视化表示出来,再左乘以矩阵B, 会得到怎样的结果呢?

从图中可以看出, 矩阵A在经过变换之后,矩阵A表示的对象其大小和方向都没有改变,只是向左旋转了90度。
也就是说,左乘矩阵B 相当于将二维矩阵表示的对象逆时针旋转90度。
事实上,我们可以对矩阵乘法代表的运动变换意义作出一些常用总结:
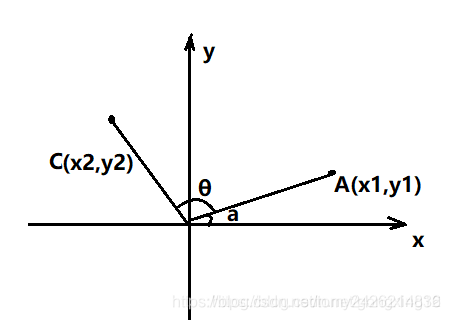
这些都是可以证明的而非简单的经验之谈,例如: 旋转变换可以用下图简单证明,A点逆时针旋转θ角到C点,可证旋转变换的式子。
将这些平移、旋转、伸缩结合起来,就是矩阵的跃迁运动。这里用的“跃迁运动”,是借用量子力学中的跃迁那样一下子跳变过去。
因此,矩阵的乘法也可以看做是对象的跃迁运动。
根据物理学运动的相对性,物体不动而坐标系运动(坐标空间变换)与坐标系不动物体运动是等效的, 可知这两种解释是一样的。
三、方法乘以对象
这个在上一章已经做出了解释,再次深入阐述一下。
每个人3个苹果(对象), 经过2倍的处理(方法), 变成了6个苹果(新对象)。
再说一下曹操的例子,曹操的各项能力:
对其各项能力提取不同的权重值得到一种考评方法来评估曹操带兵打仗的能力:
得出曹操带兵打仗的能力为:

这些都解释了矩阵乘法的一种意义:
跃迁运动CBA的例子在这里也可以用方法乘以对象的方式来解释:
在机器学习、机器视觉等领域的应用中,用方法 X 对象的理解方法通常更容易去理解和处理。
三个角度的理解你都懂了吗?
