SlimYOLOv3:Narrower,Faster and Better for Real-Time UAV Application
这篇文章是针对Yolov3做模型剪枝的,开始给出典型的模型剪枝方法流程,如图。
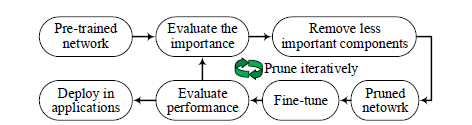
其次,给出针对yolov3的模型剪枝流程,如图

什么是深度模型的剪枝?就像论文名字中的更窄(Narrower),它是要减少模型通道数。
去除每个卷积层中不重要的特征通道。所以需要合理地评估特征通道的重要性。
其本质:通过对信道缩放因子强加L1正则化并修剪信息量较少的特征信道来实现卷积层的信道级稀疏度,以获得SlimYOLOv3。
上图中的流程解释如下:YOLOv3经过稀疏训练,得到各通道的尺度因子,然后去除那些尺度因子小的通道,将剪枝得到的模型SlimYOLOv3在数据集上进一步微调,得到检测结果,然后进入下一轮的稀疏训练。以上剪枝过程是迭代重复的,直到满足一定的模型条件,比如模型剪枝率达到一定要求。
这篇论文中,作者使用特征融合技术,引入了空间金字塔(SPP)结构,对yolov3做了一个小改变。SPPmodule包含4个并行的maxpooling layer,核大小分别是1 * 1, 5 * 5, 9 * 9,13 * 13.SPPmodule就可以提取不同感受野的特征,然后在通道维度哪里concat它们。

作者在检测header往上数第五个卷积和第六个卷积之间加入SPPmodule(从yolo层往输入方向数,第五个和第六个卷积之间加入SPPmodule)。
Detection header的输出是N * N * (3 * (4 + 1 + C)),其中N * N是feature map的尺寸,C是类别数目。
sparsity training
yolov3的网络结构除了yolo层的输入卷积层没有bn层以外,其他卷积层都有bn层,bn层的计算公式:
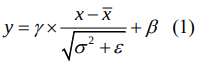
公式(1)中, 分别是一个batch的均值和方差,
分别是一个batch的均值和方差, 分别是训练缩放比例(trainable scale factor)和偏置(bias)。作者直接使用
分别是训练缩放比例(trainable scale factor)和偏置(bias)。作者直接使用 来衡量通道的重要性,
来衡量通道的重要性, 的重要性使用L1回归来衡量,sparsity training的目标公式:
的重要性使用L1回归来衡量,sparsity training的目标公式:
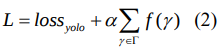
 表示L1回归,
表示L1回归, 用于平衡两个loss,用负梯度方法对非光滑L1惩罚项进行优化,作者使用
用于平衡两个loss,用负梯度方法对非光滑L1惩罚项进行优化,作者使用 值大小是0.0001
值大小是0.0001
Channel pruning:
进行完稀疏训练后,引入一个全局阈值 决定哪个特征通道被剪掉,使用全局阈值控制所有
决定哪个特征通道被剪掉,使用全局阈值控制所有 会被减去百分之几。同时,引入一个局部阈值
会被减去百分之几。同时,引入一个局部阈值 为了保护一个卷积层内的通道被过度剪枝,避免网络连接结构的完整性受到破坏。
为了保护一个卷积层内的通道被过度剪枝,避免网络连接结构的完整性受到破坏。
Fine-tuning
对剪枝后的结构进行微调,恢复精度。
Iteratively pruning
迭代剪枝,防止过拟合。
Results and Discussions

从图看出,yolov3-spp3比yolov3-spp1好,这说明了多感受野可以有效提取多尺度深度特征。
附:yolov3-spp3使用了三个spp模块,分别装在三个检测头的往后数的 5th 和 6th 之间。
