前言
此论文是对Deep residual networks [1]残差网络模块结构的改进和实验,提出了残差模块第二版,此新的模块形式不管是在前向传播或者是反向传播都有很好的优势,并且在网络训练上更加的容易,收敛更快,精度更高,泛化性更低!
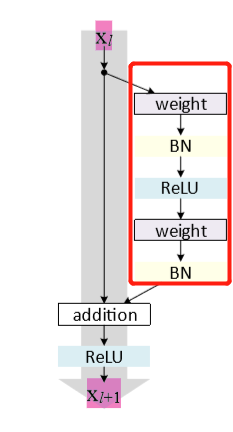
原始的残差模块
如下图,
为输入,
为输出,有如下公式
在下图所示的结构中
为残差函数,如下图红色方框中的部分,其中
为激活函数。
改进的残差模块
文中尝试创造一个直接的信息传递通道,推导表明,如果
和
都是恒等映射,那么信号可以直接从一个单元传播到任何其他单元,包括向前和向后传递。实验表明使用此结构能够使训练变得更加容易,如下图
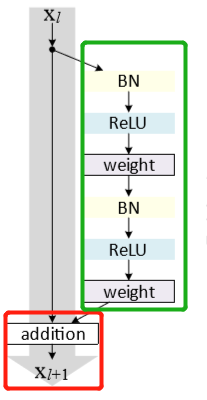
绿色方框内的改进是经过了多种实验得到的结果,但最初的设想是为了构造一个
的单位映射,我们将激活函数(ReLU和BN)视为权重层的“预激活”,而不是传统意义上的“后激活”。此时的公式:
模块分析
对新的模块
两公式结合可以得到
对此公式进行循环递归从
浅层模块到
深层模块的公式如下:
此时可以发现有两个特别有意思的性质:(1)对于L个模块的特征
都可以由浅层特征
加上一系列的残差函数求得;(2)任何特征都可以从
求得,不管是前向传播和反向传播,信息都能到达网络的最底层,对梯度而言,不管梯度是有多小。
对于loss假设为
,则根据链式法则求得反向传播:
每一个部分的梯度都只有两个部分构成,说明梯度不管多小都可以回传到最前层。其中 直接传播信息而不涉及任何权重层, 经过之前的权重层传递信息。所以, 直接保证了信息会之前传送到前层的每一层!!防止了梯度消失的问题!
结果图

不仅训练更加容易,而且精度更加高!
模块代码
keras
def BatchActivate(x):
x = BatchNormalization()(x)
x = Activation('relu')(x)
return x
def convolution_block(x, filters, size, strides=(1,1), padding='same', activation=True):
x = Conv2D(filters, size, strides=strides, padding=padding)(x)
if activation == True:
x = BatchActivate(x)
return x
def residual_block(blockInput, num_filters=16, batch_activate = False):
x = BatchActivate(blockInput)
x = convolution_block(x, num_filters, (3,3) )
x = convolution_block(x, num_filters, (3,3), activation=False)
x = Add()([x, blockInput])
if batch_activate:
x = BatchActivate(x)
return x
参考
[1]He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition. In: CVPR. (2016)
