开始学习之前,先介绍一下什么是刚体:在运动中和受力作用后,形状和大小不变,内部各点相对位置不变的物体。
在三维空间中考虑刚体,它不仅有位置,还有自身的姿态。相机(SLAM中最重要的设备)也可以看成三维空间的刚体,位置是指相机在空间中的哪个地方,而姿态则是指相机的朝向。
旋转矩阵
先从最基本的内容学习:点和向量。
点的几何意义很好理解。向量怎么理解呢?它是线性空间中的一个元素,可以把它想象成从原点指向某处的一个箭头。需要注意的是,不要把向量和向量的坐标这两个概念混淆。一个向量是空间当中的一样东西,比如说,这个时候
并不是和若干个实数相关联的,因为
不知道它处于哪个参考坐标系中。只有当我们指定这个三维空间中的某个坐标系时,才可以讨论
在此坐标系下的坐标,也就是找到了若干个实数来对应这个向量。
下面介绍几个常见的线性代数中关于向量的计算公式:对与
- 内积:
- 外积:
。外积的方向垂直于这两个向量所在的平面,大小为
,是这两个向量张成的平行四边形的有向面积。
重点:外积只对三维向量存在定义,我们还可以用外积来表示向量的旋转。外积如何来表示旋转呢?
考虑两个不平行的向量,我们来描述从
到
是如何旋转的?
实际上,我们也是用向量来表示从到
的旋转关系的。在右手法则下,我们用右手的四个手指从
握向
,大拇指的朝向就是旋转向量的方向,事实上这就是
的方向。旋转向量的大小由
和
的夹角决定。
通过这样的方式,我们构造了从到
的一个旋转向量,这个向量同样位于三维空间中,在此坐标系下,可以用3个实数来描述。
下面来看一下坐标系间的欧式变换
与向量间的旋转类似,同样可以描述两个坐标系之间的旋转关系。坐标系之间的旋转关系+平移关系,统称为坐标系之间的变换关系。
先来看下面这个场景。
在机器人的运动过程中,常见的做法是设定一个惯性坐标系(也可以称为世界坐标系),可以认为它是固定不动的。同时,相机(或者说机器人)则是一个移动坐标系。如下图:

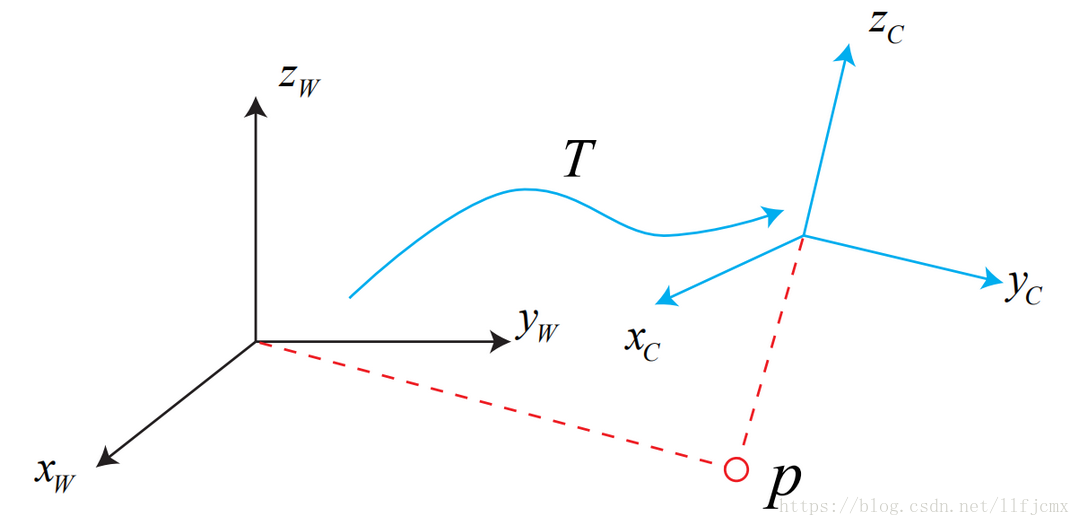
定义的坐标系是世界坐标系,
定义的坐标系是移动坐标系
现在有这么一个问题了:假设在相机视野中某个向量,它的坐标为
,在世界坐标系下面看,它的坐标是
,这两个坐标之间是如何转换的呢?
这就是这一小节要研究的问题了。
整体思路:先得到该点针对移动坐标系的坐标值,再根据机器人位姿转换到世界坐标系中,这个转换关系可以用一个矩阵来描述。
欧式变换:相机运动是一个刚体运动,它保证了一个向量在各个坐标系下的长度和夹角都不会发生变化,这种变换就是~。
想象一下:如果把手机抛到空中,在手机落地摔碎之前,只可能有空间位置和姿态的变化,而手机的长度、各个面的角度这些性质都不会发生变化。
这样一个欧式变换由一个旋转和一个平移组成。
下面来寻找变换关系:
首先考虑旋转关系:
我们设某个单位正交基,经过旋转变成了
。
那么,对于同一个向量(注意它没有因为坐标系的旋转而发生变化),设它在两个坐标系的坐标分别为
和
。
根据坐标的定义,有下列关系:
写成矩阵的形式就是:
上述等式的两边同时左乘

得到下列关系式:

我们将中间的3*3的矩阵单独拿出来,定义成一个矩阵R。可以看到,这个矩阵是由两个坐标系的两组基之间的内积组成,刻画了旋转前后同一个向量的坐标变换关系。
只要旋转是一样的,那么这个矩阵R就是一样的,因此可以说矩阵R描述了旋转本身,因此也将矩阵R称为旋转矩阵。
旋转矩阵有两个性质:(1)行列式为1;(2)旋转矩阵是正交矩阵。
所以,可以把旋转矩阵的集合定义如下:
下面来寻找平移关系:
考虑世界坐标系中的向量,经过一次旋转(用R描述)和一次平移
后,得到了
,
把旋转和平移合到一起,就得到了:。
相比于旋转,平移部分只需要把这个平移量加到旋转之后的坐标上,非常简单。通过上式,我们就可以用一个旋转矩阵
和一个平移向量
来完整的描述一个欧式空间得坐标变换关系。
这一讲暂时学到这里,都是一些理论。下一讲是变换矩阵和齐次坐标。