一、旋转矩阵
在机器人运动的过程当中,我们通常会设定一个惯性坐标系(或者叫世界坐标系),姑且认为这个坐标系是固定不动的。例如:,
,
是固定不动的世界坐标系,
,
,
是机器人坐标系。存在一个向量
,在世界坐标系下的坐标是
,在移动机器人坐标系下的坐标是
,通常情况下,我们通过传感器已知移动机器人坐标系统下的坐标
,来求
在世界坐标系下的坐标
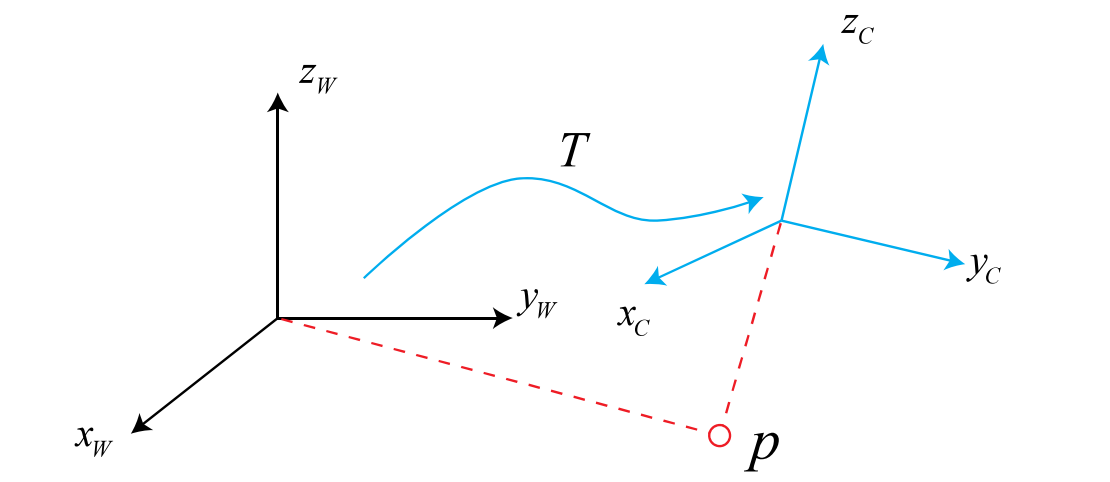
为了求,我们必须知道机器人坐标系
,
,
相对与世界坐标
,
,
做了哪些变换。我们定义世界坐标系经过变换矩阵
之后得到机器人坐标系(这可以通过计算里程和IMU的数据进行测量出来)(这也就说明了为什么在机器人刚刚启动的时候odom和base_link坐标系必须是重合的,不然没有办法计算旋转矩阵),另外一般情况下,移动机器人运动是一个刚体运动,也就是说机器人的形状和大小不会因为坐标系不同而改变,这种变换叫做欧式变换。一个欧式变换可以由旋转和平移两个部分组成。首先我们考虑旋转问题,假设在世界坐标系下的单位正交基
,在移动机器人坐标系下的单位正交基
,那么,根据向量
的模可知:
因此,,我们将
记做旋转矩阵
,因此上面的表达式可以简化为
。接下来是平移部分,假设平移部分是
经过平移向量
后得到
,那么可以得到
。所以通过旋转矩阵
和平移向量
,我们可以描述从世界坐标系到移动机器人坐标系的坐标变换。但是这种表达方式存在一个问题,对于连续的位置变换,例如机器人坐标系是随着时间在不断变换的,上面这种表达方式并不是一个线性的表达方式,假设我们经历了两次变换
,
和
,
且满足:从
到
的变换
,从
到
的变换
,那么从
到
的变换是
.并不是我们希望的的形式
(然后我们采用齐次坐标的方式进行表达,详细的部分参考李群李代数).
二、欧拉角
旋转本身就是一个很直观的现象。欧拉角可以提供一种非常直观的方式。他利用3个分离的转角,把一次旋转分解成3次绕不同的轴进行旋转。例如先绕x轴旋转,再绕y轴旋转,最后绕z轴旋转,这样就得到一个xyz轴的旋转。在欧拉角中一个常用的是“航偏-俯仰-翻滚”(yaw-pitch-roll)。可以简单记忆rpy-xyz。其中roll-对应着绕x轴旋转后的翻滚角。Pitch对应着绕y轴旋转后的俯仰值,yawd对应着绕z轴旋转后的航偏值。那么旋转部分就可以通过roll-pitch-yaw这三个量来描述。

在使用欧拉角这种表达方式的时候,会存在万象锁的问题。也就是一旦旋转pitch为90度,就会导致第一次旋转和第三次转换等价,丢失了一个表示维度。万象锁现象如下图所示

三、四元数
旋转矩阵用9个量来描述3自由度的旋转,具有冗余性;欧拉角虽然用3个量来描述3自由度的旋转,但是具有万向锁的问题,因此我们选择用四元数,(ROS当中描述转向的都是采用的四元数)。一个四元数拥有一个实部和三个虚部组成。

三个虚部满足以下关系

写成矩阵的样子就是,其中
,从欧拉角到四元数的公式:

从四元数转化到欧拉角公式

四、不同运动描述转换的程序实现
C++(转自https://blog.csdn.net/zhuoyueljl/article/details/70789472)
//欧拉角转换到四元数
Eigen::Quaterniond euler2Quaternion(double roll, double pitch, double yaw)
{
Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitZ());
Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitY());
Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitX());
Eigen::Quaterniond q = rollAngle * yawAngle * pitchAngle;
return q;
}
//四元数转换到欧拉角
Eigen::Vector3d Quaterniond2Euler(const double x,const double y,const double z,const double w)
{
Eigen::Quaterniond q;
q.x() = x;
q.y() = y;
q.z() = z;
q.w() = w;
Eigen::Vector3d euler = q.toRotationMatrix().eulerAngles(2, 1, 0);
return euler;
}
//旋转矩阵转换到四元数
Eigen::Quaterniond rotationMatrix2Quaterniond(Eigen::Matrix3d R)
{
Eigen::Quaterniond q = Eigen::Quaterniond(R);
q.normalize();
return q;
}
//四元数转换到旋转矩阵
Eigen::Matrix3d Quaternion2RotationMatrix(const double x,const double y,const double z,const double w)
{
Eigen::Quaterniond q;
q.x() = x;
q.y() = y;
q.z() = z;
q.w() = w;
Eigen::Matrix3d R = q.normalized().toRotationMatrix();
return R;
}
//欧拉角转换到旋转矩阵
Eigen::Matrix3d euler2RotationMatrix(const double roll, const double pitch, const double yaw)
{
Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitZ());
Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitY());
Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitX());
Eigen::Quaterniond q = rollAngle * yawAngle * pitchAngle;
Eigen::Matrix3d R = q.matrix();
return R;
}
//旋转矩阵转换到欧拉角
Eigen::Vector3d RotationMatrix2euler(Eigen::Matrix3d R)
{
Eigen::Matrix3d m;
m = R;
Eigen::Vector3d euler = m.eulerAngles(0, 1, 2);
return euler;
}
参考
https://www.cnblogs.com/21207-iHome/p/6894128.html
https://blog.csdn.net/zhuoyueljl/article/details/70789472
中国大学MOOC———《机器人操作系统入门》