说明:大部分内容摘自这个链接http://blog.codinglabs.org/articles/pca-tutorial.html,但是由于打不开了,,,也没联系到博主,若侵权,望谅解,联系我删除,我觉得原文写得非常好所以分享到这里,算法实现部分以及第3点还有少点杂七杂八的是我自己写的。
一.基于最大可分性来解释PCA
(1)简单说明
对于原有的数据我们希望降维后能够尽量的离散,这样能保留原有信息,方差可以衡量离散程度,试想如果有的数据点降维后重叠在一起了,信息就丢失了,如果降低到k维,要做的就是,找到k个方向向量使得把原数据投影到每个方向向量后数据的方差最大,这k个方向向量是k维空间的一组标准正交基
(2)详细说明
一般的,如果我们有M个N维向量,想将其变换为由R个N维向量表示的新空间中,那么首先将R个基按行组成矩阵A,然后将向量按列组成矩阵B,那么两矩阵的乘积AB就是变换结果,其中AB的第m列为A中第m列变换后的结果。
数学表示为:
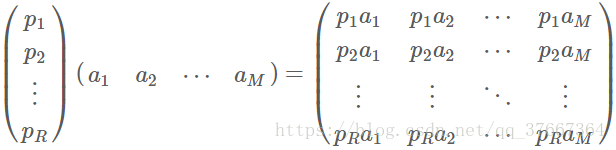
其中pi是一个行向量,表示第i个基,aj是一个列向量,表示第j个原始数据记录。
特别要注意的是,这里R可以小于N,而R决定了变换后数据的维数。也就是说,我们可以将一N维数据变换到更低维度的空间中去,变换后的维度取决于基的数量。因此这种矩阵相乘的表示也可以表示降维变换。
接下来最关键的问题:如何选择基才是最优的。或者说,如果我们有一组N维向量,现在要将其降到K维(K小于N),那么我们应该如何选择K个基才能最大程度保留原有的信息?
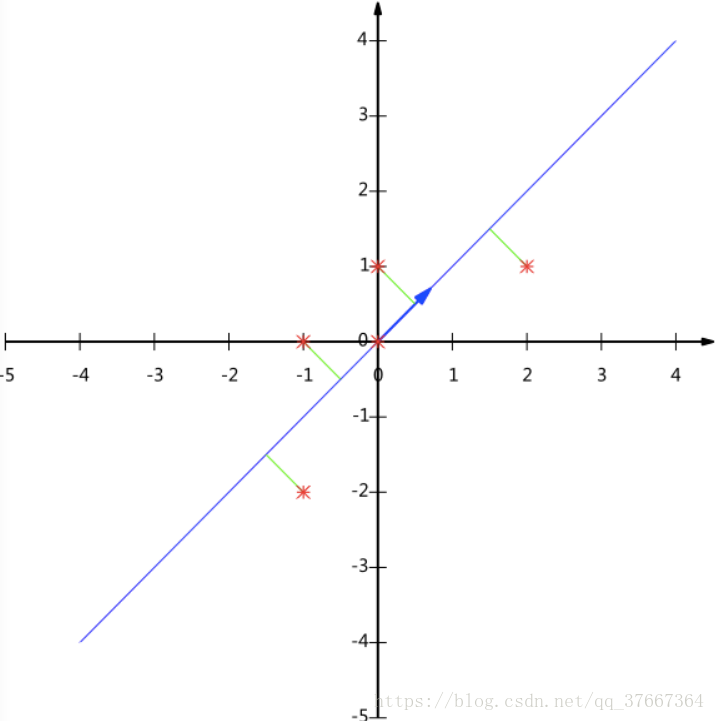
为了避免过于抽象的讨论,我们仍以一个具体的例子展开。假设我们的数据(已经均值归一化)由五条二维记录组成,将它们表示成矩阵形式:
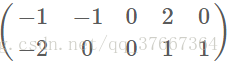
在坐标轴上如图:
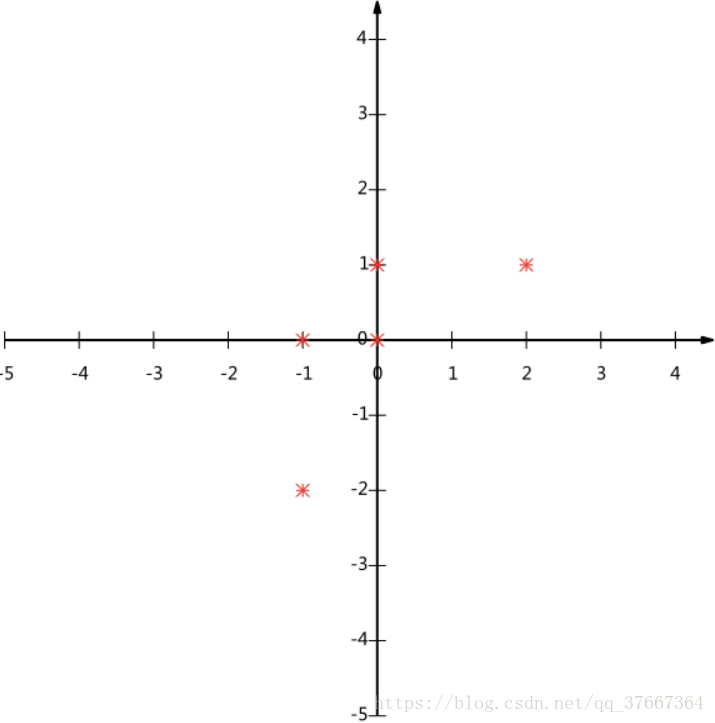
如何选择这个方向(或者说基)才能尽量保留最多的原始信息呢?一种直观的看法是:希望投影后的投影值尽可能分散。
以上图为例,可以看出如果向x轴投影,那么最左边的两个点会重叠在一起,中间的两个点也会重叠在一起,于是本身四个各不相同的二维点投影后只剩下两个不同的值了,这是一种严重的信息丢失,同理,如果向y轴投影最上面的两个点和分布在x轴上的两个点也会重叠。所以看来x和y轴都不是最好的投影选择。我们直观目测,如果向通过第一象限和第三象限的斜线投影,则五个点在投影后还是可以区分的。
现在要做的就是最大化投影后的数据间的方差,由于已经均值归一化了所以方差表示如下:
对于上面二维降成一维的问题来说,找到那个使得方差最大的方向就可以了。不过对于更高维,还有一个问题需要解决。考虑三维降到二维问题。与之前相同,首先我们希望找到一个方向使得投影后方差最大,这样就完成了第一个方向的选择,继而我们选择第二个投影方向。
如果我们还是单纯只选择方差最大的方向,很明显,这个方向与第一个方向应该是“几乎重合在一起”,显然这样的维度是没有用的,因此,应该有其他约束条件。从直观上说,让两个变量尽可能表示更多的原始信息,我们是不希望它们之间存在(线性)相关性的,因为相关性意味着两个变量不是完全独立,必然存在重复表示的信息。
数学上可以用两个变量的协方差表示其相关性,由于已经让每个变量均值为0,则:
可以看到,在变量均值为0的情况下,两个变量的协方差简洁的表示为其内积除以元素数m。
当协方差为0时,表示两个变量完全不相关。为了让协方差为0,我们选择第二个基时只能在与第一个基正交的方向上选择。因此最终选择的两个方向一定是正交的。
至此,我们得到了降维问题的优化目标:将一组N维向量降为K维(K大于0,小于N),其目标是选择K个单位(模为1)正交基,使得原始数据变换到这组基上后,各变量两两间协方差为0,而变量的方差则尽可能大(在正交的约束下,取最大的K个方差)。
接下来就说说应用数学如何解决这个问题:
假设我们只有a和b两个变量,那么我们将它们按行组成矩阵X:
然后我们用X乘以X的转置,并乘上系数1/m:

这个矩阵就是协方差矩阵,对角线上的两个元素分别是两个变量的方差,而其它元素是a和b的协方差。
根据上述推导,我们发现要达到优化目前,等价于将协方差矩阵对角化:即除对角线外的其它元素化为0,并且在对角线上将元素按大小从上到下排列,也就是说哪个特征的方差最大我们就保留它对应的基,这样我们就达到了优化目的。这样说可能还不是很明晰,我们进一步看下原矩阵与基变换后矩阵协方差矩阵的关系:
设原始数据矩阵X对应的协方差矩阵为C,而P是一组基按行组成的矩阵,设Y=PX,则Y为X对P做基变换后的数据。设Y的协方差矩阵为D,我们推导一下D与C的关系:
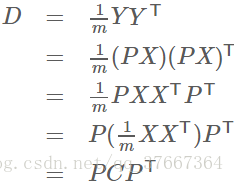
现在事情很明白了!我们要找的P不是别的,而是能让原始协方差矩阵对角化的P。换句话说,优化目标变成了寻找一个矩阵P,满足P*C*PT是一个对角矩阵,并且对角元素按从大到小依次排列,那么P的前K行就是要寻找的基,用P的前K行组成的矩阵乘以X就使得X从N维降到了K维并满足上述优化条件。
由上文知道,协方差矩阵C是一个是对称矩阵,在线性代数上,实对称矩阵有一系列非常好的性质:
1)实对称矩阵不同特征值对应的特征向量必然正交。
2)设特征向量λ重数为r,则必然存在r个线性无关的特征向量对应于λ,因此可以将这r个特征向量单位正交化。
由上面两条可知,一个n行n列的实对称矩阵一定可以找到n个单位正交特征向量,设这n个特征向量为e1,e2,⋯,en,我们将其按列组成矩阵:

则对协方差矩阵C有如下结论:
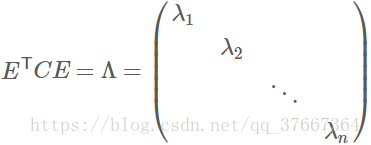
其中Λ为对角矩阵,其对角元素为各特征向量对应的特征值(可能有重复)
以上结论不再给出严格的数学证明,对证明感兴趣的朋友可以参考线性代数书籍关于“实对称矩阵对角化”的内容。
到这里,我们发现我们已经找到了需要的矩阵P:

P是协方差矩阵的特征向量单位化后按行排列出的矩阵,其中每一行都是C的一个特征向量。如果设P按照Λ中特征值的从大到小,将特征向量从上到下排列,则用P的前K行组成的矩阵乘以原始数据矩阵X,就得到了我们需要的降维后的数据矩阵Y。
最后再说说pca在做的就是:假如我们有m个n维的样本数据,那么我们做的就是先挑出第一个特征,这组特征投影到一个基向量后方差最大,再挑出第二个特征,投影到一个与之前基向量正交的基向量后方差最大,直到第k个,也就是降维为只有m个k维的样本
总结一下PCA的算法步骤:
设有m条n维数据。
1)将原始数据按列组成n行m列矩阵X
2)将X的每一行(代表一个属性变量)进行零均值化,即减去这一行的均值
3)求出协方差矩阵C=1/mXXT
4)求出协方差矩阵的特征值及对应的特征向量
5)将特征向量按对应特征值大小从上到下按行排列成矩阵,取前k行组成矩阵P
6)Y=PX即为降维到k维后的数据
下面是一个例子:将下面这个矩阵降到一维
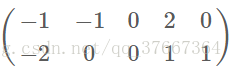
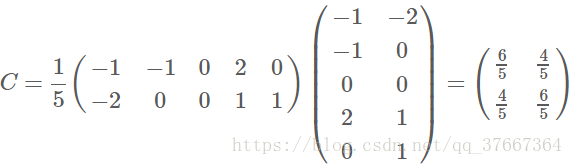
直接求协方差矩阵:
求解后特征值为:

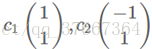
对应的特征向量分别是:
标准化后特征向量为:
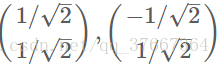
因此我们的矩阵P是:
最后我们用P的第一行乘以数据矩阵,就得到了降维后的表示:

投影后为:
(3) 注:降维后保留了原特征的数据的百分之多少(也可称为解释率)可以由下面的公式计算:
一般而言,设λ1,λ2,λ3…λn表示协方差矩阵的特征值(按由大到小顺序排列),使得λj为对应于特征向量uj的特征值。那么如果我们保留前k个成分,则保留的方差百分比可计算为:

二.PCA与SVD
SVD(Singular Value Decomposition奇异值分解)是一种矩阵分解的方法,目的很明确,就是将矩阵A分解为三个矩阵UΣVT的乘积的形式,我们不妨接着PCA的步骤往下做。 我们有A=BVT,我们将B写成归一化的形式,其拆开成B=UΣ,其中U的每一列是单位向量,而Σ=diag{σ1,σ2,⋯,σn}则是B中每个向量的模长且σ1>σ2>⋯>σn。而B中每一列的模长为|Avi|,由于vi是 的特征向量,对应特征值为λi,那么Avi平方为
= ,这是特征向量的定义
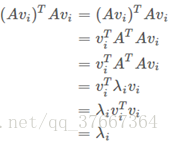
所以有|Avi|= ,所以将B写成B=UΣ的形式后,U是正交矩阵,而Σ是一个对角阵,其每一个元素σi= 。 我们再来看SVD的图示:
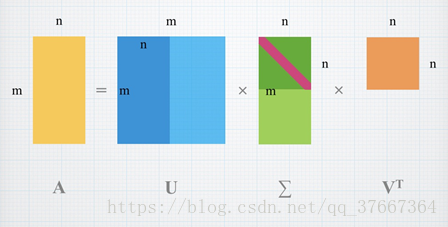
从图中看出,中间的奇异值矩阵由大到小排列,越后面的值对结果的影响越小,因此,如果只保留较大的奇异值和其对应的U、V中的向量,对于矩阵压缩则能起到很好的作用。在该例子中,m>n,能通过

可以看出,中间那个U消掉了,这也能部分反映SVD和PCA间的关系。
实际上:
假如我们有m个n维特征的样本,构成矩阵X,PCA就是在对X的协方差矩阵进行特征分解,而SVD直接对X进行分解,SVD不用先求出协方差矩阵
三.为何要引入SVD?
之前我也在想这个问题,既然方阵都能特征分解,而在PCA中我们分解的就是一个协方差方阵,那还使用SVD干嘛?用特征分解实现pca算法时我才知道,对于有的协方差矩阵特征值会是虚数,这种情况算法会失效,而SVD奇异值分解得到的奇异值一定是非负实数,可以解决之前的情况!矩阵的知识不是很扎实,没有详细学过svd,有时候总感觉不明不白的。。。
四.python实现
算法细心一点也挺好写的,但是我没写svd分解的版本,只是简单写了特征分解的版本。
# coding: utf-8
'''
特征向量分解实现PCA算法
如果特征值出现复数该算法会失效,这就引入了SVD,奇异值分解,
奇异值类比于特征值,但是奇异值一定是非负实数,不存在之前的情况
'''
import numpy as np
class PCA(object):
m = 0
n = 0
#降维所需的基向量
base_vectors = None
#均值归一化
def mean_normalization(self,X):
for j in range(self.n):
me = np.mean(X[:,j])
X[:,j] = X[:,j] - me
return X
#r为降低到的维数
def fit(self,X,r):
self.m = X.shape[0]
self.n = X.shape[1]
#均值归一化
X = self.mean_normalization(X)
Xt = X.T
#协方差矩阵
c = (1/self.m) * Xt.dot(X)
print(c)
#求解协方差矩阵的特征向量和特征值
eigenvalue,featurevector=np.linalg.eig(c)
#对特征值索引排序 从大到小
aso = np.argsort(eigenvalue)
indexs = aso[::-1]
print("特征值:",eigenvalue)
print("特征向量:",featurevector)
print("降为",r,"维")
eigenvalue_sum = np.sum(eigenvalue)
self.base_vectors = []
for i in range(r):
print("第",indexs[i],"特征的解释率为:",(eigenvalue[indexs[i]] / eigenvalue_sum))
self.base_vectors.append(featurevector[:,indexs[i]])#取前r个特征值大的特征向量作为基向量
self.base_vectors = np.array(self.base_vectors)
return
def transform(self,X):
#r*n的P乘以n*m的矩阵转置后为m*r的矩阵
return self.base_vectors.dot(X.T).T
def fit_transform(self,X,r):
self.fit(X, r)
return self.transform(X)
#测试
from sklearn import datasets
iris = datasets.load_iris()
X = iris.data.T
pca = PCA()
X_transformed = pca.fit_transform(X, r=1)