文章目录
奇异值分解SVD 原理+作业
1. 简介
1.1 简介
矩阵分解在机器学习领域有着广泛应用,是降维相关算法的基本组成部分。
矩阵分解的定义
把一个矩阵表示成多个矩阵连乘的形式。
矩阵分解主要有两个作用
- 分解后的每个小矩阵能够更容易的求逆
- 分解后的每个小矩阵有特殊的物理意义
常见的矩阵分解方式有以下两种
-
特征分解Eigendecomposition, 也叫作谱分解Spectral decomposition
-
奇异值分解Singular Value decompositon(SVD)
特征值分解是一个提取矩阵特征很不错的方法,可是它只是对方阵而言的,在现实的世界中,咱们看到的大部分矩阵都不是方阵,好比说有 N N N个学生,每一个学生有 M M M科成绩,这样造成的一个 N × M N\times M N×M的矩阵就不多是方阵,咱们怎样才能描述这样普通的矩阵呢的重要特征呢?奇异值分解能够用来干这个事情,奇异值分解是一个能适用于任意的矩阵的一种分解的方法:
想要理解SVD,必须理解的数学知识
1.2 正交变换
正交变换公式
X = U Y X=UY X=UY
上式表示: X X X是 Y Y Y的正交变换,其中 U U U是正交矩阵, X X X和 Y Y Y为列向量。
下面用─个例子说明正交变换的含义∶
假设有两个单位列向量 a a a和 b b b,两向量的夹角为 θ \theta θ,如下图:

现对向量a,b进行正交变换:
a ⃗ ′ = U ⋅ a ⃗ b ⃗ ′ = U ⋅ b ⃗ \vec{a}^\prime=U\cdot \vec{a} \\ \vec{b}^\prime=U\cdot \vec{b} a′=U⋅ab′=U⋅b
a ⃗ ′ , b ⃗ ′ \vec{a}^\prime,\vec{b}^\prime a′,b′的模:
∣ ∣ a ⃗ ′ ∣ ∣ = ∣ ∣ U ⋅ a ⃗ ∣ ∣ = ∣ ∣ U ∣ ∣ ⋅ ∣ ∣ a ⃗ ∣ ∣ = ∣ ∣ a ⃗ ∣ ∣ = 1 ∣ ∣ b ⃗ ′ ∣ ∣ = ∣ ∣ U ⋅ b ⃗ ∣ ∣ = ∣ ∣ U ∣ ∣ ⋅ ∣ ∣ b ⃗ ∣ ∣ = ∣ ∣ b ⃗ ∣ ∣ = 1 ||\vec{a}^\prime||=||U\cdot \vec{a}||=||U||\cdot||\vec{a}||=||\vec{a}||=1 \\ ||\vec{b}^\prime||=||U\cdot \vec{b}||=||U||\cdot||\vec{b}||=||\vec{b}||=1 ∣∣a′∣∣=∣∣U⋅a∣∣=∣∣U∣∣⋅∣∣a∣∣=∣∣a∣∣=1∣∣b′∣∣=∣∣U⋅b∣∣=∣∣U∣∣⋅∣∣b∣∣=∣∣b∣∣=1
由上式可知 a ⃗ ′ , b ⃗ ′ \vec{a}^\prime,\vec{b}^\prime a′,b′的模为1
a ⃗ ′ \vec{a}^\prime a′和 b ⃗ ′ \vec{b}^\prime b′的内积为
a ⃗ ′ T ⋅ b ⃗ ′ = ( U ⋅ a ⃗ ) T ⋅ ( U ⋅ b ⃗ ) = a ⃗ T U T U b ⃗ ⇒ a ⃗ ′ T ⋅ b ⃗ ′ = a ⃗ T ⋅ b ⃗ {\vec{a}^{\prime}}^T \cdot \vec{b}^\prime=(U\cdot \vec{a})^T\cdot (U\cdot \vec{b})=\vec{a}^TU^TU\vec{b} \\ \Rightarrow{\vec{a}^{\prime}}^T\cdot \vec{b}^\prime=\vec{a}^T\cdot \vec{b} a′T⋅b′=(U⋅a)T⋅(U⋅b)=aTUTUb⇒a′T⋅b′=aT⋅b
由上式可知,正交变换前后的内积相等。
a ⃗ ′ \vec{a}^\prime a′和 b ⃗ ′ \vec{b}^\prime b′的夹角 θ ′ \theta^\prime θ′
cos θ ′ = a ⃗ ′ T ⋅ b ⃗ ′ ∣ ∣ a ⃗ ′ T ∣ ∣ ⋅ ∣ ∣ b ⃗ ′ ∣ ∣ cos θ = a ⃗ T ⋅ b ⃗ ∣ ∣ a ⃗ T ∣ ∣ ⋅ ∣ ∣ b ⃗ ∣ ∣ \cos \theta^\prime=\frac{
{\vec{a}^{\prime}}^T \cdot \vec{b}^\prime}{||{\vec{a}^{\prime}}^T||\cdot || \vec{b}^\prime||} \\ \cos \theta= \frac{\vec{a}^T\cdot \vec{b}}{||\vec{a}^T||\cdot ||\vec{b}||} cosθ′=∣∣a′T∣∣⋅∣∣b′∣∣a′T⋅b′cosθ=∣∣aT∣∣⋅∣∣b∣∣aT⋅b
正交变换前后的夹角相等,即 θ ′ = θ \theta^\prime=\theta θ′=θ
因此,正交变换的性质可用下图来表示:
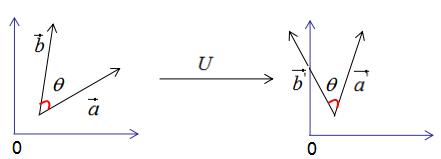
正交变换的两个重要性质:
1)正交变换不改变向量的模。
2)正交变换不改变向量的夹角。
如果向量 a ⃗ \vec{a} a和 b ⃗ \vec{b} b是基向量,那么正交变换的结果如下图:

基向量正交变换后的结果仍是基向量 。基向量是表示向量最简洁的方法,向量在基向量的投影就是所在基向量的坐标,我们通过这种思想去理解特征值分解和推导SVD分解。
正交变换只是将变换向量用另一组正交基表示,在这个过程中并没有对向量做拉伸,也不改变向量的空间位置,假如对两个向量同时做正交变换,那么变换前后这两个向量的夹角显然不会改变。
1.3 特征值和特征向量
我们首先回顾下特征值和特征向量的定义如下:
A x = λ x Ax=\lambda x Ax=λx
A A A是一个 n × n n\times n n×n的矩阵, x x x是一个 n n n维向量,则我们说 λ \lambda λ是矩阵 A A A的一个特征值,而 x x x是矩阵 A A A的特征值 λ \lambda λ所对应的特征向量。
求出特征值和特征向量有什么好处呢?
我们可以将矩阵 A A A特征分解,如果我们求出了矩阵 A A A的 n n n个特征值 λ 1 ≤ λ 2 ≤ ⋯ ≤ λ n \lambda_1\le \lambda_2\le \cdots\le \lambda_n λ1≤λ2≤⋯≤λn,以及这 n n n个特征值对应的特征向量 { w 1 , w 2 , ⋯ , w n } \{w_1,w_2,\cdots,w_n\} {
w1,w2,⋯,wn},如果这 n n n个特征向量线性无关,那么矩阵 A A A就可以用下式的特征分解表示
A = W Σ W − 1 A=W\Sigma W^{-1} A=WΣW−1
其中 W W W是这 n n n个特征向量所张成的 n × n n\times n n×n维矩阵,而 Σ \Sigma Σ为这 n n n个特征值为主对角线的 n × n n\times n n×n维矩阵。
为了可视化特征值分解,假设 A A A是 2 × 2 2\times 2 2×2的对称矩阵, U = ( u 1 , u 2 ) , Σ = ( λ 1 , λ 2 ) U=(u_1,u_2),\Sigma=(\lambda_1,\lambda_2) U=(u1,u2),Σ=(λ1,λ2)。把上式展开
A u 1 = λ 1 u 1 A u 2 = λ 2 u 2 Au_1=\lambda_1u_1 \\ Au_2=\lambda_2u_2 Au1=λ1u1Au2=λ2u2
用图形表示为
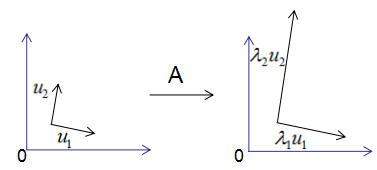
由上图可知,矩阵A没有旋转特征向量,它只是对特征向量进行了拉伸或缩短(取决于特征值的大小),因此,对称矩阵对其特征向量(基向量)的变换仍然是基向量(单位化) 。
特征向量和特征值的几何意义:若向量经过矩阵变换后保持方向不变,只是进行长度上的伸缩,那么该向量是矩阵的特征向量,伸缩倍数是特征值。
一般我们会把 W W W的这个 n n n个特征向量标准化,即满足 ∣ ∣ w i ∣ ∣ 2 = 1 ||w_i||_2=1 ∣∣wi∣∣2=1,或者说 w i ⋅ w i T = 1 w_i\cdot w_i^T=1 wi⋅wiT=1.此时 W W W的 n n n个特征向量为标准正交基。满足 W T W = I W^TW=I WTW=I,即 W T = W − 1 W^T=W^{-1} WT=W−1,也就是说 W W W为酉矩阵,在实数矩阵中,酉矩阵指的是转置矩阵与逆矩阵相等的矩阵;在复数矩阵中,酉矩阵指的是共轭转置矩阵(矩阵中各元素实部不变,虚部相反数)与逆矩阵相等的矩阵。
这样我们的特征分解表达式可以写成:
A = W Σ W T A=W\Sigma W^T A=WΣWT
注意到要进行特征分解,矩阵A必须为方阵。那么如果A不是方阵,即行和列不相同时,我们还可以对矩阵进行分解吗?答案是可以,此时我们的SVD登场了。
1.4 SVD
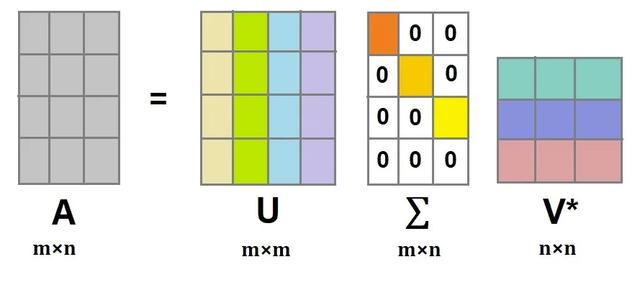
假设 A A A是一个 m × n m\times n m×n的矩阵,那么可以定义 A A A的SVD为
A = U Σ V T A=U\Sigma V^T A=UΣVT
其中, Σ m × n \Sigma_{m\times n} Σm×n对角矩阵,主对角线上的元素为奇异值, V n × n V_{n\times n} Vn×n和 U m × m U_{m\times m} Um×m都是酉矩阵,即满足 U T U = I , V T V = I U^TU=I,V^TV=I UTU=I,VTV=I
证明如下
先回顾一下正交变换的思想:基向量正交变换后的结果仍是基向量 。
我们用正交变换的思想来推导SVD分解:
假设 A A A是 M × N M\times N M×N的矩阵,秩为 K K K, R a n k ( A ) = k Rank(A)=k Rank(A)=k。
存在一组正交基V:
V = ( v 1 , v 2 , ⋯ , v k ) V=(v_1,v_2,\cdots,v_k) V=(v1,v2,⋯,vk)
矩阵对其变换后仍是正交基,记为 U U U:
U = ( A v 1 , A v 2 , ⋯ , A v k ) U=(Av_1,Av_2,\cdots,Av_k) U=(Av1,Av2,⋯,Avk)
由正交基定义,得:
( A v i ) T ( A v j ) = 0 (Av_i)^T(Av_j)=0 (Avi)T(Avj)=0
上式展开:
v i T A T A v j = 0 v_i^TA^TAv_j=0 viTATAvj=0
如果我们将 A T A^T AT和 A A A做矩阵乘法,那么会得到 n × n n\times n n×n的一个方阵 A T A A^TA ATA.既然 A T A A^TA ATA是方阵,那么我们就可以进行特征分解,得到特征向量 v i v_i vi和特征向量 λ \lambda λ。当 v i v_i vi是 A T A A^TA ATA的特征向量时,有:
( A T A ) v i = λ v i (A^T A)v_i=\lambda v_i (ATA)vi=λvi
根据 v i T A T A v j = 0 v_i^TA^TAv_j=0 viTATAvj=0,得到
λ v i T v j = 0 \lambda v_i^Tv_j=0 λviTvj=0
即假设成立 。
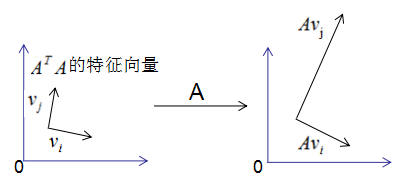
图形表示如下:
正交向量的模:
∣ ∣ A v i ∣ ∣ 2 = ( A v i ) T ( A v i ) ⇒ ∣ ∣ A v i ∣ ∣ 2 = v i T A T A v ⇒ ∣ ∣ A v i ∣ ∣ 2 = λ i v i T v = λ i ∴ ∣ ∣ A v i ∣ ∣ 2 = λ i ||Av_i||^2=(Av_i)^T(Av_i) \\ \Rightarrow ||Av_i||^2=v_i^TA^TAv \\ \Rightarrow ||Av_i||^2=\lambda_iv_i^Tv=\lambda_i \\ \therefore ||Av_i||^2=\sqrt{\lambda_i} ∣∣Avi∣∣2=(Avi)T(Avi)⇒∣∣Avi∣∣2=viTATAv⇒∣∣Avi∣∣2=λiviTv=λi∴∣∣Avi∣∣2=λi
单位化正交向量,得:
u i = A v i ∣ ∣ A v i = 1 λ i A v i ⇒ A v i = λ i u i u_i=\frac{Av_i}{||Av_i}=\frac{1}{\sqrt{\lambda_i}}Av_i \\ \Rightarrow Av_i=\sqrt{\lambda_i}u_i ui=∣∣AviAvi=λi1Avi⇒Avi=λiui
结论:当基向量是 A A A^A AA的特征向量时,矩阵A转换后的向量也是基向量 。用矩阵的形式表示为
A V = U Σ AV=U\Sigma AV=UΣ
其中 V = ( v 1 , v 2 , ⋯ , v k ) , Σ = [ σ 1 σ 2 ⋱ σ k ] , U = ( u 1 , u 2 , ⋯ , u k ) , σ i = λ i V=(v_1,v_2,\cdots ,v_k),\Sigma=\begin{bmatrix}\sigma_1&&&\\ &\sigma_2&&\\ &&\ddots& \\ &&&\sigma_k \end{bmatrix},U=(u_1,u_2,\cdots,u_k),\sigma_i=\sqrt{\lambda_i} V=(v1,v2,⋯,vk),Σ=⎣⎢⎢⎡σ1σ2⋱σk⎦⎥⎥⎤,U=(u1,u2,⋯,uk),σi=λi
V是 N ∗ K N*K N∗K矩阵,U是 M ∗ K M*K M∗K矩阵, Σ \Sigma Σ是M*K的矩阵,需要扩展成方阵形式:
A V = U Σ AV=U\Sigma AV=UΣ
两式右乘 V T V^T VT可得矩阵的奇异值分解
A = U Σ V T A=U\Sigma V^T A=UΣVT
2. 流程
用一个简单的例子来说明矩阵是如何进行奇异值分解的。矩阵A定义为:
A = [ 0 1 1 1 1 0 ] A=\begin{bmatrix} 0&1 \\ 1&1 \\ 1&0 \end{bmatrix} A=⎣⎡011110⎦⎤
首先求出 A T A A^TA ATA和 A A T AA^T AAT
A T A = [ 0 1 1 1 1 0 ] [ 0 1 1 1 1 0 ] = [ 2 1 1 2 ] A A T = [ 0 1 1 1 1 0 ] [ 0 1 1 1 1 0 ] = [ 1 1 0 1 2 1 0 1 1 ] A^TA=\begin{bmatrix}0&1&1\\ 1&1&0\end{bmatrix}\begin{bmatrix}0&1\\ 1&1\\ 1&0\end{bmatrix}=\begin{bmatrix}2&1\\ 1&2\end{bmatrix} \\ AA^T=\begin{bmatrix}0&1\\ 1&1 \\ 1&0\end{bmatrix}\begin{bmatrix}0&1&1\\ 1&1&0\end{bmatrix}=\begin{bmatrix}1&1&0 \\ 1&2&1\\ 0&1&1\end{bmatrix} ATA=[011110]⎣⎡011110⎦⎤=[2112]AAT=⎣⎡011110⎦⎤[011110]=⎣⎡110121011⎦⎤
求 A T A A^TA ATA的特征向量 V V V和特征值 λ \lambda λ
V = [ 1 2 − 1 2 1 2 1 2 ] V=\begin{bmatrix}\frac{1}{\sqrt{2}}&-\frac{1}{\sqrt{2}}\\ \frac{1}{\sqrt{2}}&\frac{1}{\sqrt{2}}\end{bmatrix} V=[2121−2121]
对应的特征值为 λ 1 = 3 , λ 2 = 1 \lambda_1=3,\lambda_2=1 λ1=3,λ2=1,对应的平方根 σ 1 = 3 , σ 2 = 1 \sigma_1=\sqrt{3},\sigma_2=1 σ1=3,σ2=1
求 A A T AA^T AAT的特征向量 U U U
U = [ 1 6 1 2 1 3 2 6 0 − 1 3 1 6 − 1 2 1 3 ] U=\begin{bmatrix} \frac{1}{\sqrt{6}}&\frac{1}{\sqrt{2}}&\frac{1}{\sqrt{3}} \\ \frac{2}{\sqrt{6}}&0&-\frac{1}{\sqrt{3}} \\ \frac{1}{\sqrt{6}}&-\frac{1}{\sqrt{2}}&\frac{1}{\sqrt{3}} \end{bmatrix} U=⎣⎢⎡616261210−2131−3131⎦⎥⎤
所以 A A A的奇异值分解
A = [ 1 6 1 2 1 3 2 6 0 − 1 3 1 6 − 1 2 1 3 ] [ 3 0 0 1 0 0 ] [ 1 2 − 1 2 1 2 1 2 ] A=\begin{bmatrix} \frac{1}{\sqrt{6}}&\frac{1}{\sqrt{2}}&\frac{1}{\sqrt{3}} \\ \frac{2}{\sqrt{6}}&0&-\frac{1}{\sqrt{3}} \\ \frac{1}{\sqrt{6}}&-\frac{1}{\sqrt{2}}&\frac{1}{\sqrt{3}} \end{bmatrix} \begin{bmatrix}\sqrt{3}&0\\ 0&1\\ 0&0\end{bmatrix} \begin{bmatrix}\frac{1}{\sqrt{2}}&-\frac{1}{\sqrt{2}}\\ \frac{1}{\sqrt{2}}&\frac{1}{\sqrt{2}}\end{bmatrix} A=⎣⎢⎡616261210−2131−3131⎦⎥⎤⎣⎡300010⎦⎤[2121−2121]
3. 作业
3.1 手动实现SVD
要求
根据课堂讲授的SVD分解方法,用 Python 语言编程实现矩阵的SVD 分解和 thin SVD 表达。
要求:
代码要有规范的注释, 输出以下两个测试例的结果
A = [ 1 0 0 0 2 0 0 3 0 0 0 0 0 0 0 0 4 0 0 0 ] A=\begin{bmatrix} 1&0&0&0&2 \\ 0&0&3&0&0 \\ 0&0&0&0&0 \\ 0&4&0&0&0 \end{bmatrix} A=⎣⎢⎢⎡10000004030000002000⎦⎥⎥⎤
第二个
A = [ 2 0 0 1 2 0 − 1 2 ] A=\begin{bmatrix} 2&0 \\ 0&\frac{1}{\sqrt{2}} \\ 0&\frac{-1}{\sqrt{2}} \end{bmatrix} A=⎣⎡2000212−1⎦⎤
代码
import numpy as np
def get_data2():
return np.array([[2, 0],
[0, 1 / np.sqrt(2)],
[0, 1 / np.sqrt(2)], ])
def get_data():
return np.array([[1, 0, 0, 0, 2],
[0, 0, 3, 0, 0],
[0, 0, 0, 0, 0],
[0, 4, 0, 0, 0]])
def get_eigenvalue(A):
return np.linalg.eigvals(A)
def get_U(A):
return np.linalg.eig(A.dot(A.T))
def get_V(A):
return np.linalg.eig(A.T.dot(A))
def SVD():
sigma, V = get_V(A)
sigma, V, length = bubble_sort(sigma, V)
sigma2, U = get_U(A)
sigma, U, _ = bubble_sort(sigma2, U)
S = np.zeros((m, n))
for i in range(length):
S[i][i] = np.sqrt(sigma[i])
# print(S)
# U = np.zeros((m, m))
# print(U.shape)
for i in range(length):
# print((1 / np.sqrt(sigma[i])) * np.dot(A, V[:, i]))
U[:, i] = (1 / np.sqrt(sigma[i])) * np.dot(A, V[:, i])
return U, S, V
def bubble_sort(sigma, B):
"""
对奇异值进行排序
:param sigma:
:param B:
:return:
"""
length = len(sigma)
for i in range(length - 1):
# i表示比较多少轮
for j in range(length - i - 1):
if sigma[j] < sigma[j + 1]:
sigma[j], sigma[j + 1] = sigma[j + 1], sigma[j]
B[:, [j, j + 1]] = B[:, [j + 1, j]]
temp = 0
for i in range(length):
if sigma[i] > 0:
temp = temp + 1
return sigma, B, temp
# 获取数据
A = get_data2()
m = A.shape[0]
n = A.shape[1]
k = min(m, n)
U, S, V = SVD()
temp2 = np.dot(np.dot(U, S), V.T)
print("SVD-- \n U=\n{}\n Z=\n{}\n V=\n{}".format(U, S, V))
print("*" * 10)
print(temp2)
结果
SVD--
U=
[[ 1. 0. 0. ]
[ 0. 0.70710678 0.70710678]
[ 0. 0.70710678 -0.70710678]]
Z=
[[2. 0.]
[0. 1.]
[0. 0.]]
V=
[[1. 0.]
[0. 1.]]
**********
[[2. 0. ]
[0. 0.70710678]
[0. 0.70710678]]
3.2 人脸识别
要求
作业2:实现基于奇异值分解的人脸识别。
要求:
- 提交可运行的python源码(包括数据集、运行代码、运行结果)。
- 撰写WORD文档,说明与分析所用人脸识别方法、原理,实现,测试
数据集介绍
数据集如下:ORL数据集
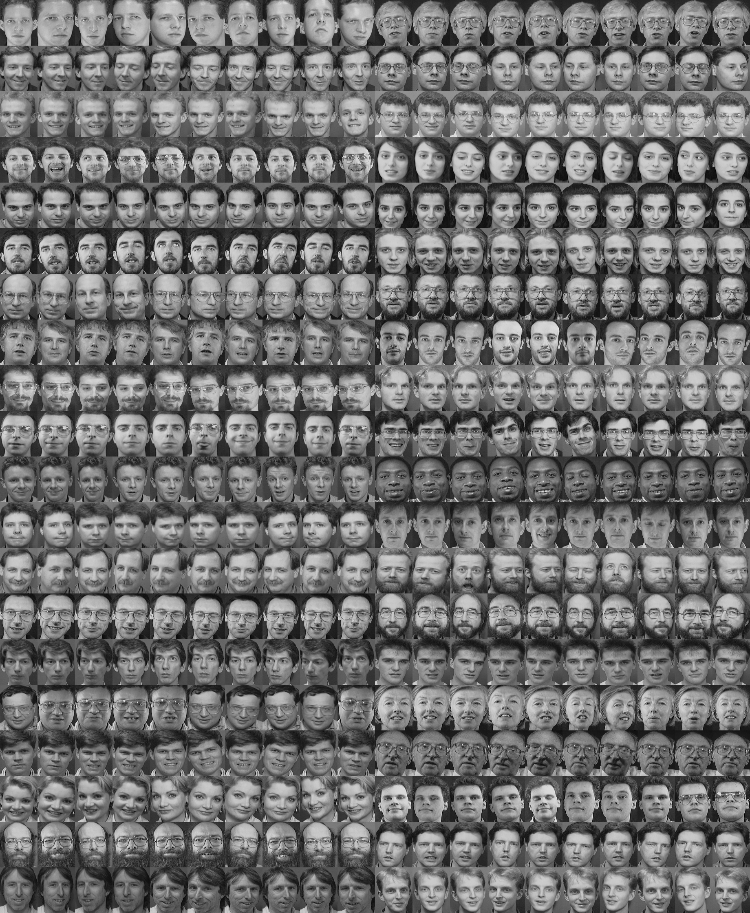
目录结构如下
数据集下载
我自己上传的 ORL数据集attrface | Kaggle
官网网址,貌似不能用了https://www.cl.cam.ac.uk/research/dtg/attarchive/facedatabase.html
代码
# 人脸识别是一个分类问题
# svc 支持向量解决分类问题
import cv2
import numpy as np
import os
data_path = r"att_faces"
train_data = []
test_data = []
image = []
sigma_data = []
# 使用50个特征值作为该图像的特征信息
K = 80
print("选取了{}个特征".format(K))
def read_image():
"""
加载图片信息
:return:
"""
global train_data, test_data
root_path = os.listdir(data_path)
for d in root_path:
s_path = os.path.join(data_path, d)
for idx, image_path in enumerate(os.listdir(s_path)):
# 因为是二维图,所以是二维的 [112,92]
img = cv2.imread(os.path.join(s_path, image_path), cv2.IMREAD_GRAYSCALE)
image.append(img)
train_data = image[0::2]
test_data = image[1::2]
def train():
"""
进行训练,训练的目的就是把40 张图片的所有 特征值提取出来,放进sigma_data
:return:
"""
for image in train_data:
# 数据进行展示
u, sigma, v = np.linalg.svd(image)
# 对sigma 从小到大排序
sigma = np.sort(sigma)
# 选取特征值K个最大特征值作为Sm_i的特征值
sigma_data.append(sigma[-K:])
print("训练结束")
def test():
"""
用提前准备好的图片 做最近邻算法的比较,和谁的最近邻 小
:return:
"""
# 分类正确的个数
acc = 0
for idx, image in enumerate(test_data):
u, sigma, v = np.linalg.svd(image)
# 对sigma 从小到大排序
sigma = np.sort(sigma)
# 选取特征值K个最大特征值作为Sm_i的特征值
sigma = sigma[-K:]
m = get_index(sigma)
raw = int(idx / 5) + 1
predict = int(m / 5) + 1
if raw == predict:
acc += 1
print("这张图预测为{},预测正确".format(predict, raw))
else:
print("这张图预测为{},预测错误,本来是{}".format(predict, raw))
print("最终准确率{}%,--[{}/{}]".format(100 * acc / len(test_data), acc, len(test_data)))
# 使用
def get_index(sigma):
"""
求出最小近邻的 所在是索引值
:param sigma: 测试图像的前 K 个最大特征值
:return:
"""
index = []
for i in sigma_data:
# 最小近邻,其实就是求第二范数
index.append(np.linalg.norm(i - sigma))
return np.argmin(index)
# 加载数据
read_image()
# print(test_data)
# 训练
train()
# 测试
test()
结果如下
这张图预测为21,预测错误,本来是38
这张图预测为38,预测正确
这张图预测为39,预测正确
这张图预测为39,预测正确
这张图预测为39,预测正确
这张图预测为39,预测正确
这张图预测为39,预测正确
这张图预测为34,预测错误,本来是40
这张图预测为40,预测正确
这张图预测为40,预测正确
这张图预测为40,预测正确
这张图预测为40,预测正确
最终准确率73.0%,--[146/200]
参考资料