版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/ferriswym/article/details/60467466
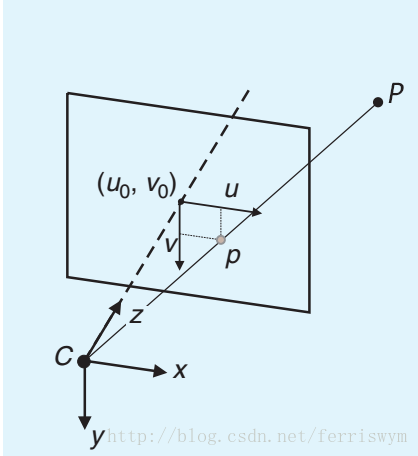
最常用的透视相机模型是假设一个针孔投射系统,图像由来自物体的光线穿过透镜中心(投影中心)的交叉形成,并存在一个焦平面。
记
P=[X,Y,Z]T
为相机坐标系下一个实物点的物理坐标,
p=[u,v]T
为其投影图像的图像坐标(像素),C为相机的光心,即投影中心。
从3D世界到2D图像的映射由透视投影方程给出:
λ⎡⎣⎢uv1⎤⎦⎥=KP=⎡⎣⎢αu000αv0u0v01⎤⎦⎥⎡⎣⎢XYZ⎤⎦⎥(1)
X,Y,Z:
点在相机坐标系下的物理坐标
u,v:
点的投影在图像中的图像坐标(像素)
u0,v0:
投影中心在图像中的图像坐标(像素)
αu,αv:
焦距,在此公式中包含物理坐标对图像坐标的转换,单位为像素
λ:
深度因子,从公式中易看出
λ=z
,即物点距光心的距离
对此公式的理解包含两步:1、3D坐标与2D坐标的转换,2、物理坐标对图像坐标的转换
1、3D坐标转2D坐标
如图,设物理点
Q(X,Y,Z)
在投影图像上的坐标为
q(x,y)
,
f
为物理焦距
不考虑长度与像素的转换以及投射中心的偏移,则有
x=f(XZ)(2)
y=f(YZ)(3)
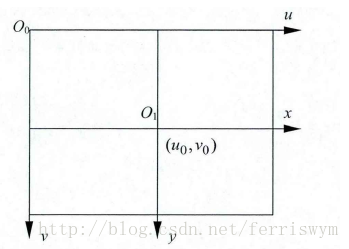
2、物理坐标对图像坐标的转换
如图,
(u,v)
为图像像素坐标(行数和列数),
(u0,v0)
为图像主点的图像坐标,设
(x,y)
为以图像主点为原点的以物理单位表示的坐标。
则有
u=xdx+u0(4)
v=ydy+v0(5)
其中
dx,dy
分别表示每个像素在x轴和y轴上的物理尺寸,单位为毫米/像素。
写成矩阵形式为
⎡⎣⎢uv1⎤⎦⎥=⎡⎣⎢⎢⎢⎢⎢1dx0001dy0u0v01⎤⎦⎥⎥⎥⎥⎥⎡⎣⎢xy1⎤⎦⎥(6)
其逆关系表示为
⎡⎣⎢xy1⎤⎦⎥=⎡⎣⎢dx000dy0−u0dx−v0dy1⎤⎦⎥⎡⎣⎢uv1⎤⎦⎥(7)
综上,从
(1)
中得到
u=αuzX+u0(8)
v=αvzY+v0(9)
结合
(2)(3)(4)(5)(8)(9)
,可得
αu=fdx
αv=fdy
此为对
(1)
中
αu
和
αv
的理解
参考文献:
1. D. Scaramuzza and F. Fraundorfer, “Visual Odometry, Part I: The First 30 Years and Fundamentals [Tutorial],” IEEE RAM, 2011.
2. http://www.360doc.com/content/14/0410/14/10724725_367760675.shtml