1.
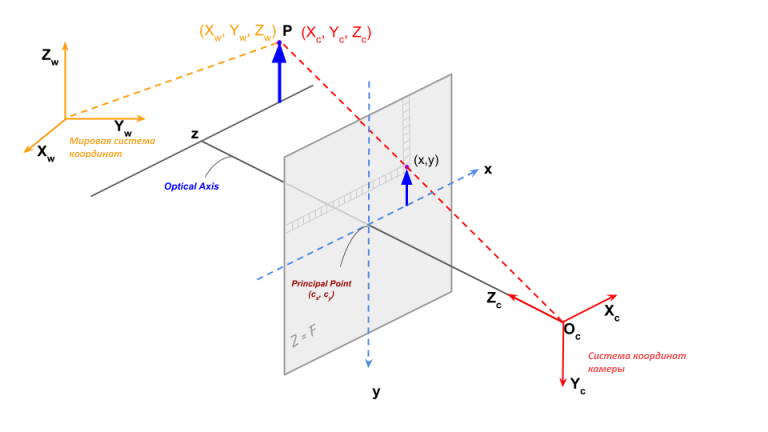
图为P点在图像平面上的投影
2.相机校准
校准是评估相机参数的过程。我们需要获得有关相机的所有信息(规格或设计因素)以确定现实世界中的3D 点与相应的 2D 图像之间的确切关系,即校准相机捕获的图像中的投影(每个像素) 。
需要用到两种参数:
- 相机/镜头系统的内部参数。例如,焦距、光学中心和镜头径向畸变因素。
- 与相机相对于某个世界坐标系的方向(旋转和位移)相关的外部参数。
3.使用opencv校准相机
流程如下:
1).确定已知尺寸的三维棋盘图案点的实际世界坐标。
2).从不同的视角捕捉棋盘的多个图像
3).使用OpenCV的findChessboardConers方法,在不同定位的图像中找到所有三维点(u,v)的像素坐标。
4).使用OpenCV的calibrateCamera方法计算三维和像素的相机特性。
扫描二维码关注公众号,回复:
13648854 查看本文章
