Ubuntu18.04 LTS Melodic ROS 教程:使用URDF创建一个虚拟机器人模型
Building a Visual Robot Model with URDF from Scratch
Description: Learn how to build a visual model of a robot that you can view in Rviz
教程描述:学习如何创建一个简单机器人模型方法,并在Rviz中查看
Keywords: URDF
关键词:URDF
Tutorial Level: BEGINNER
教程级别:初学者
创建一个简单模型
1、建立包文件
$ cd ~/catkin_ws/src/
$ catkin_create_pkg myfirst urdf
2、建立urdf文件
在myfirst文件夹下建立urdf文件夹,创建描述文件myfirst.urdf,命令如下:
$ cd ~/catkin_ws/src/myfirst
$ mkdir urdf
$ cd ~/catkin_ws/src/myfirst/urdf
$ sudo gedit myfirst.urdf
拷贝如下代码到gedit新建的myfirst.urdf文件里,保存退出编辑。
<?xml version="1.0"?>
<robot name="myfirst">
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
</visual>
</link>
</robot>3、建立launch文件
$ cd ~/catkin_ws/src/myfirst
$ mkdir launch
$ cd ~/catkin_ws/src/myfirst/launch
$ sudo gedit myfirst.launch
拷贝如下代码到gedit新建的 myfirst.launch文件里,保存退出编辑。
<launch>
<arg name="model" />
<arg name="gui" default="False" />
<param name="robot_description" textfile="$(find myfirst)/urdf/myfirst.urdf" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" />
</launch>
4、运行launch文件:
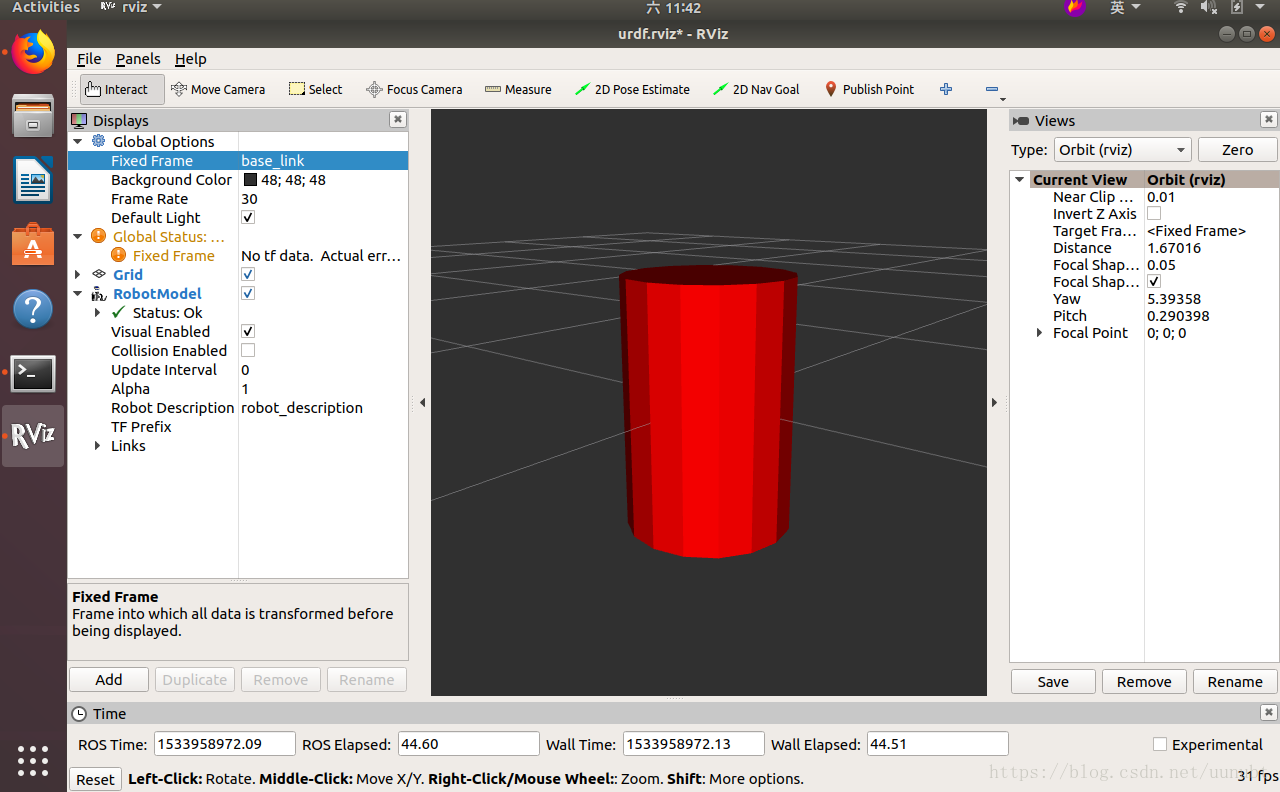
$ roslaunch myfirst myfirst.launch model:=urdf/myfirst.urdf
注意:
1,左下菜单add添加RobotModel
2,Fix Frame调整map为base_link
3,可以尝试更改高度和半径,看看效果。
uu@uu-HP-EliteBook-6930P-Notebook-PC:~$ cd ~/catkin_ws/src/
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src$ catkin_create_pkg myfirst urdf
Created file myfirst/package.xml
Created file myfirst/CMakeLists.txt
Successfully created files in /home/uu/catkin_ws/src/myfirst. Please adjust the values in package.xml.
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src$ cd ~/catkin_ws/src/myfirst
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src/myfirst$ mkdir urdf
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src/myfirst$ cd ~/catkin_ws/src/myfirst/urdf
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src/myfirst/urdf$ sudo gedit myfirst.urdf
[sudo] password for uu:
(gedit:5137): IBUS-WARNING **: 11:17:27.738: The owner of /home/uu/.config/ibus/bus is not root!
** (gedit:5137): WARNING **: 11:17:47.158: Set document metadata failed: Setting attribute metadata::gedit-spell-language not supported
** (gedit:5137): WARNING **: 11:17:47.224: Set document metadata failed: Setting attribute metadata::gedit-encoding not supported
** (gedit:5137): WARNING **: 11:17:50.046: Set document metadata failed: Setting attribute metadata::gedit-position not supported
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src/myfirst/launch$ cd ~/catkin_ws/src/myfirst/launch
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src/myfirst/launch$ sudo gedit myfirst.launch
(gedit:5340): IBUS-WARNING **: 11:41:14.219: The owner of /home/uu/.config/ibus/bus is not root!
** (gedit:5340): WARNING **: 11:41:37.773: Set document metadata failed: Setting attribute metadata::gedit-spell-language not supported
** (gedit:5340): WARNING **: 11:41:37.774: Set document metadata failed: Setting attribute metadata::gedit-encoding not supported
** (gedit:5340): WARNING **: 11:41:40.646: Set document metadata failed: Setting attribute metadata::gedit-position not supported
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src/myfirst/launch$ roslaunch myfirst myfirst.launch model:=urdf/myfirst.urdf
... logging to /home/uu/.ros/log/80bde492-9d18-11e8-953a-00216a949182/roslaunch-uu-HP-EliteBook-6930P-Notebook-PC-5354.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://uu-HP-EliteBook-6930P-Notebook-PC:44559/
SUMMARY
========
PARAMETERS
* /robot_description: <?xml version="1....
* /rosdistro: melodic
* /rosversion: 1.14.2
* /use_gui: False
NODES
/
joint_state_publisher (joint_state_publisher/joint_state_publisher)
robot_state_publisher (robot_state_publisher/state_publisher)
rviz (rviz/rviz)
auto-starting new master
process[master]: started with pid [5364]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 80bde492-9d18-11e8-953a-00216a949182
process[rosout-1]: started with pid [5375]
started core service [/rosout]
process[joint_state_publisher-2]: started with pid [5378]
process[robot_state_publisher-3]: started with pid [5379]
process[rviz-4]: started with pid [5380]
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
^C[rviz-4] killing on exit
[robot_state_publisher-3] killing on exit
[joint_state_publisher-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
uu@uu-HP-EliteBook-6930P-Notebook-PC:~/catkin_ws/src/myfirst/launch$