二十六、对称矩阵及正定性
实对称矩阵
实对称矩阵是所有元素均为实数的对称矩阵。具有以下性质:
1、所有特征值均为实数
2、所有特征向量均为实向量
3、不同特征值对应的特征向量之间是正交的
4、具有n个线性无关的特征向量
5、任意实对称阵A都可以用正交阵\(P\)对角化:\(A=Q\Lambda Q^{-1}=Q\Lambda Q^T\)
分析第一条性质
下面证明第1条性质:
因为\(A\)为实对称阵,从而\(\bar A=A,A^T=A\)
\[Ax=\lambda x\]
两边同取共轭:
\[\bar A \bar x=\bar \lambda \bar x \]
两边同时转置:
\[\bar x^T\bar {A^T} =\bar \lambda \bar x^T \]
\[\bar x^T A =\bar \lambda \bar x^T \]
两边同时右乘\(x\)
\[\bar x^T Ax =\bar \lambda \bar x^T x \]
\[\lambda \bar x^T x =\bar \lambda \bar x^T x \]
其中,\(\|x\|^2=\bar x^T x\),又特征向量模长不为0,从而左右同时除去\(\bar x^T x\)便可得到:
\[\bar\lambda=\lambda\]
分析第五条性质
国内线代教材已指出,可通过求出A的每个特征值的特征向量,并对每个特征值的\(n-r(\lambda_iI-A)\)个线性无关的特征向量施密特正交单位化后,得到n个相互正交的单位特征向量,将它们按列排列,即可得到正交阵P=\((q_1,\cdots,q_n)\),\(q_i\)对应于\(\Lambda\)中第i个主对角元,其值为特征向量\(q_i\)对应的特征值
\[A=Q\Lambda Q^T=(q_1,\cdots,q_n)\mathrm{diag}(\lambda_1,\cdots,\lambda_n)(q_1,\cdots,q_n)^T \]
\[A=(q_1,\cdots,q_n)(\lambda_1q_1,\cdots,\lambda_nq_n)^T=\sum_{i=1}^n \lambda_iq_iq_i^T\]
正定矩阵
定义:正定矩阵是特殊的实对称矩阵,其所有特征值均大于0。\(x\neq 0\)时,对应的二次型\(x^TAx\)恒大于0
判断实对称阵是否正定的办法:
1、求出所有特征值,判断是否都大于0
2、n个K阶顺序主子式均大于0
3、通过倍加操作将A化为阶梯型矩阵U后,判断U的所有主元(必须有n个主元)是否全部大于0。更一般地,大于0的主元个数=大于0的特征值个数,小于的主元个数=小于0的特征值个数,
二十七、复数矩阵和快速傅里叶变换
复数向量的内积与模长
对于n维复数列向量\(x,y\in \mathbb{C}^n\),其内积被定义为:
\[x\cdot y=\bar x^T y\]
定义\(\bar x^T=x^H\)(hermitian),则:
\[x\cdot y=x^Hy\]
相应地,n维复数列向量\(x\in \mathbb{C}^n\)的模长被定义为:
\[\|x\|=\sqrt{x·x}=\sqrt{x^Hx}\]
复数矩阵、埃尔米特矩阵与酉矩阵
由复数构成的矩阵称为复数矩阵
类似之前的定义,也有
\[\bar A^T=A^H \]
对于复数方阵\(A\in \mathbb{C^{n\times n}}\),若:
\[A^H=A \]
则称A为埃尔米特矩阵(Hermitian Matrix),可见,埃尔米特矩阵中,与对角线对称的\(a_{i,j}=\bar a_{j,i}\)
若方阵\(A\)有\(A^HA=I\),则称其为酉矩阵,对应于实矩阵里的正交矩阵。类似正交矩阵,在酉矩阵中,任意两个列向量是正交的,\(\alpha^H\beta=0\),同样地,任意两个行向量也是正交的
快速傅里叶变换
傅里叶矩阵
\[F_n=\begin{pmatrix}1 & 1 & 1 & \cdots & 1\\ 1 & w & w^2 & \cdots & w^{n-1}\\ 1 & w^2 & w^4 & \cdots & w^{2(n-1)}\\ \vdots & \vdots & \vdots & \ddots & \vdots\\ 1 & w^{n-1} & w^{2(n-1)} & \cdots & w^{(n-1)^2} \end{pmatrix}_{n \times n}\]
其中,\((F_n)_{i,j}=w^{ij}\),注意傅里叶矩阵的下标是从0开始的,即i,j=0,...,n-1
\(\{1,w,\cdots,w^{n-1}\}\)为n阶单位根,\(w^n=1,w=e^{i\frac {2\pi} n }=\cos(\frac {2\pi} n)+i\sin(\frac {2\pi} n)\)(欧拉公式)
傅里叶矩阵是酉矩阵,\(F_n^HF_n=I\)
给出n维列向量x,x的离散傅里叶变换(DFT)可表示为\(F_nx\),离散傅里叶逆变换为\(F_n^{-1}x\)
正常情况下,这个乘法过程时间复杂度为\(O(n^2)\)
矩阵分解实现快速傅里叶变换
令\(D_n=\mathrm{diag}(1,w,\cdots,w^{n-1})\),则:
\[F_{2n}= \begin{pmatrix}I & D_n\\I & -D_n\end{pmatrix} \begin{pmatrix}F_n & 0\\0 & F_n\end{pmatrix}P_{2n}\]
其中P为奇偶置换阵,将奇数列(行)排在前面,然后将偶数列(行)排在后面。例如:
\[P_4=\begin{pmatrix} 1 &&&\\ &&1&\\ &1&&\\ &&&1 \end{pmatrix}\]
则
\[F_{2n}x= \begin{pmatrix}I & D_n\\I & -D_n\end{pmatrix} \begin{pmatrix}F_n & 0\\0 & F_n\end{pmatrix}P_{2n}x\]
设\(P_{2n}x=(\alpha^T,\beta^T)^T\),其中\(\alpha,\beta\in \mathbb{R}^n\)
\[F_{2n}x= \begin{pmatrix}I & D_n\\I & -D_n\end{pmatrix} \begin{pmatrix}F_n & 0\\0 & F_n\end{pmatrix}(P_{2n}x)\]
\[=\begin{pmatrix}I & D_n\\I & -D_n\end{pmatrix} \begin{pmatrix}F_n & 0\\0 & F_n\end{pmatrix}\begin{pmatrix}\alpha\\ \beta\end{pmatrix}\]
\[=\begin{pmatrix}I & D_n\\I & -D_n\end{pmatrix} \begin{pmatrix}F_n\alpha & 0\\0 & F_n\beta\end{pmatrix}\]
求解\(\begin{pmatrix}I & D_n\\I & -D_n\end{pmatrix} \begin{pmatrix}F_n\alpha & 0\\0 & F_n\beta\end{pmatrix}\)时,计算量最大的是计算\(F_n\alpha,F_n\beta\),这两个计算完成后,其余的n阶矩阵乘法都是在\(O(n)\)时间内完成(因为I和D都是对角阵)
FFT的关键是用这种矩阵分解的方法,递归下去计算\(F_{n}\alpha,F_{n}\beta\)
设计算\(F_nx\)的时间复杂度是\(f(n)\),则
\[f(2n)=f(n)+n\]
\[f(2n)=n+\frac n 2+\frac n 4+\cdots +1= O(nlogn)\]
二十七、正定矩阵和最小值
正定矩阵的定义和判定方法,在国内教材中都有,这里不再赘述
正定二次型的几何意义
对于二次型\(f(x_1,x_2)=x^TAx\)而言,若A正定,则所有点\((x_1,x_2,f(x_1,x_2))\)在直角坐标系中构成了一个开口向上,过原点的碗型(表明当\(x_1,x_2\)不同时为0时,二次型取值一定大于0)。
若在这个碗型,z轴为1处作一个平行于xoy面的平面,可以截得一个椭圆:\(ax_1^2+bx_1x_2+cx_2^2=1\)
Hessian矩阵与极小值判定
定义n元函数f的Hessian矩阵为

当\(H(f)\)正定时,\(f(x)\)在该点取得极小值
正定二次型与主轴定理
对于正定二次型\(x^TAx\),\(x^TAx=1\)是一个椭圆形(x为三维向量则是椭球体),\(A\)的n个线性无关的特征向量代表该几何图形(椭圆、椭球...)的n条主轴的方向,每个特征向量对应的特征值是该主轴的长度
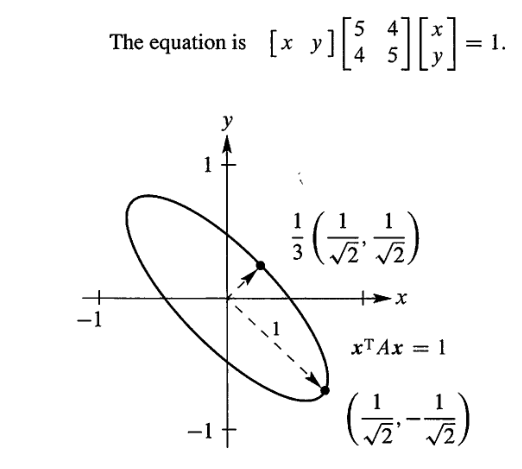
通过将二次型化为标准型\(x^T(P^TAP)x=1\)可以使得该几何图形通过正交变换P,使得所有主轴与各个坐标系平行
将二次型先化为标准形,再化为规范形\(x^T(P^TAP)x=1\),则可以使得该几何图形通过线性变换P,变为标准的圆(球体,...)
二十九、相似矩阵与Jordan标准型
相似矩阵
对于方阵A,B,若存在可逆阵\(P\)使得\(P^{-1}AP=B\),则\(A\sim B\)
注意,若方阵A,B中有一个不可对角化,则A,B有完全相同的特征值也不能得到A和B相似。
只有当A,B有完全相同的特征值,都可对角化为相同的\(\Lambda\)时,才能说A,B相似
Jordan标准型
设n阶方阵A有K个线性无关的特征向量\(x_1,\cdots,x_K\),对应的特征值为\(\lambda_1,\cdots,\lambda_K\),则一定存在可逆阵\(P\)使得
\[P^{-1}AP= \begin{pmatrix} J_1&&\\ &J_2&\\ &&\ddots\\ &&&J_K \end{pmatrix}=J\]
J称为A的Jordan标准型,其中\(J_i\)是一个Jordan块,为方阵,对应于K个线性无关的特征向量里的第i个,其中的\(\lambda_i\)是该特征向量对应的特征值:
\[J_i=\begin{pmatrix} \lambda_1&1&\\ &\lambda_2&1\\ &&\ddots&\ddots\\ &&&\lambda_{r_i} \end{pmatrix}\]
当K=n时,每个Jordan块都是一阶的,J就是对角阵了
若J中对应\(\lambda_i\)的Jordan块有t个,则\(\dim V_{\lambda_i}=t\)
三十、奇异值分解
任意m*n矩阵A都可以通过奇异值分解(singularly valueable decomposition,SVD)被分解为:
\[A=U\Sigma V^T\]
其中,U,V是正交阵,\(U=(u_1,\cdots,u_m)\),\(V=(v_1,\cdots,v_n)\),\(\Sigma\)是\(m\times n\)对角阵
\((u_1,\cdots,u_m)\),\((v_1,\cdots,v_n)\)都是标准正交基,A矩阵可以让n维空间\(C(v_1,\cdots,v_n)\)投射到r(A)维空间中,即,将一组标准正交基\((v_1,\cdots,v_n)\)投射到\((Av_1,\cdots,Av_n)\),而\(\dim (AV)= r(A)\)
计算过程
\[A^TA=V\Sigma^TU^TU\Sigma V^T=V\Sigma^T\Sigma V^T\]
\(r(A^TA)=r(A)\)。
求出n阶对角阵\(A^TA\)全体特征值、特征向量,便可得到\(v_1,\cdots,v_n\),即该对角阵的n个线性无关的特征向量,对应的特征值构成的对角阵\(\Lambda=\Sigma^2=\mathrm{diag}(\lambda_1,\cdots,\lambda_{r(A)},0,\cdots,0)\)
从而\(\lambda_i=\sigma_i^2,\sigma_i=\sqrt {\lambda_i}\)被称为奇异值,由于\(\Lambda\)有r(A)个非零元素,因此奇异值有r(A)个
\[\Sigma= \begin{pmatrix} \sigma_1\\ & \ddots\\ && \sigma_{r(A)}\\ &&& 0 \end{pmatrix}_{m\times n}\]
\[U=(u_1,\cdots,u_{r(A)},u_{r(A)+1},\cdots,u_n)\]
\[V=(v_1,\cdots,v_{r(A)},v_{r(A)+1},\cdots,v_n)\]