本文为目前机器学习最好公开课——吴恩达机器学习的学习总结。
这篇文章我们来回顾机器学习中线性代数相关的知识。
矩阵和向量
矩阵和向量有关知识相信大家在线性代数中已经打好了基础,这里不再详细介绍,仅总结一些需要注意的地方防止出错。
- 矩阵的维数表示为行数×列数,例如 表示一个 3 行 4 列的矩阵;
- 向量可以理解为只有 1 列的矩阵,向量的维数=向量中的元素个数;
- 关于下标索引从 1 开始还是从 0 开始,在今后的文章中,我们会默认从 1 开始,如有特例将会说明;
矩阵的加法和标量乘法
略,详细讲解见《线性代数》
矩阵向量乘法
矩阵与向量的乘法为矩阵与矩阵相乘的特例,直接略过,这里仅讲解一个小技巧。
假设我们有 4 个房屋的面积,房屋价格与房屋面积的公式如下图右边所示,我们可以通过构造矩阵与向量相乘的方式快速求解。
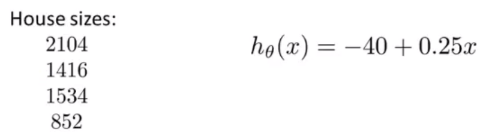
首先我们构造房屋大小的矩阵,其中第一列用来计算公式中的常数,第二列代表公式中的第二项
。
再由公式构造向量:
矩阵和向量相乘得到的矩阵的每一行即为我们要求的解:
这样做有两个好处:
-
编程实现时代码更佳简洁。从原来的一个循环可以简化为只有一行代码(示例为 Octave)。并且如 Matlab 等软件是以矩阵为基础进行计算的。
prediction = datamatrix * parameters -
编程实现时,矩阵相乘的效率在数据量很大的时候远远高于循环求解。
矩阵与矩阵乘法
矩阵与矩阵的乘法可以在线性回归模型中计算参数 ,从而替代梯度下降算法。其实矩阵与矩阵的乘法也可以看作是矩阵与很多列向量相乘的结果,其过程可以参考《线性代数》。我们同样只讲解一个小技巧。
和前面矩阵与向量相乘的例子相同,但这次我们有 3 个假设函数,我们可以通过矩阵与矩阵相乘一次运算算出所有的解。
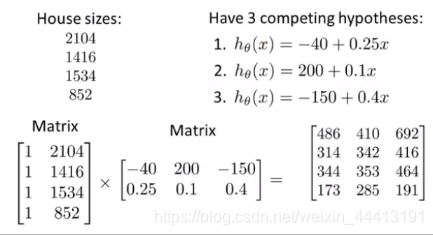
用左边的矩阵与右边矩阵的第一列向量相乘,得到等号右边矩阵的第一列,即第一个假设函数对应的 3 个预测值。我们用了一次运算,就计算出了 12 个结果,并且现在许多编程语言都提供了十分高效的线性代数库,它们都经过了高度优化,包括你计算机的 SIMD 并行,这些都可以很好地满足我们的一切需求。
矩阵乘法特征
这里我们只需要知道矩阵乘法满足结合律但不满足交换律,且单位矩阵的维度通常暗含的上下文中即可,不过多介绍。详细的讲解可参考《线性代数》。
逆和转置
矩阵的逆和转置的运算及定义不再详细介绍,具体可参考《线性代数》。但在机器学习中,对于矩阵的逆,我们需要做一些说明。
当今很多的编程语言都提供了矩阵的逆的求解,例如在 Octave 中可以用 pinv(A) 求解矩阵的逆,其中有圆整误差。
不是所有矩阵都有逆矩阵,例如元素都为 0 的方阵就没有逆矩阵,还有一些类似的矩阵也没有逆矩阵,可以将它们理解为接近 0 矩阵的矩阵。这种不存在逆矩阵的矩阵称为奇异矩阵或退化矩阵。
至此,我们简单的回顾了机器学习中矩阵相关的内容,如果你有线性代数的基础,那这些知识再简单不过了。接下来我们会运用这些工具构建更多的线性回归,并且推导一些强大的学习算法。