版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/you1314520me/article/details/78856322
此博客停止更新迁移至SnailDove’s Blog ,查看本文点击 此处 清华大学线性代数2笔记汇总:线性代数总结
**提示:**如果文中图片看不清文字,请右键单击鼠标,选择在新窗口打开图片,然后放大图片(这边上传之前都是可以看清的,由于网页正文部分大小固定,因此图片被自动缩小以便适配网页),截图部分是课堂ppt老师随手的板书。
矩阵特征值的正负在求解微分方程和差分方程时,会影响解是否收敛,例如上图如果
λ
i
<
0
\lambda_i < 0
λ i < 0
e
λ
i
t
e^{\lambda_i t}
e λ i t
t
→
∞
,
e
λ
i
t
→
0
t\rightarrow \infty, e^{\lambda_it}\rightarrow0
t → ∞ , e λ i t → 0
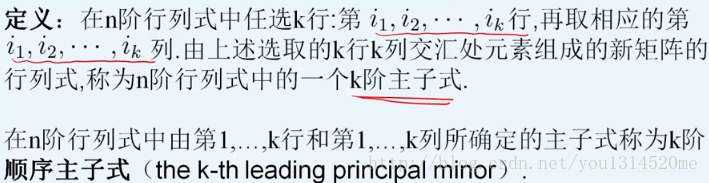
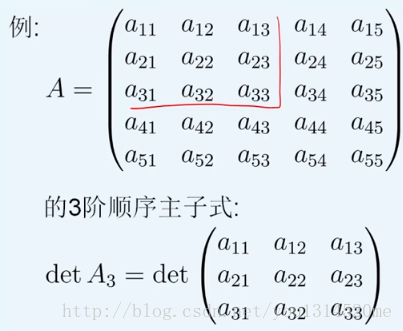
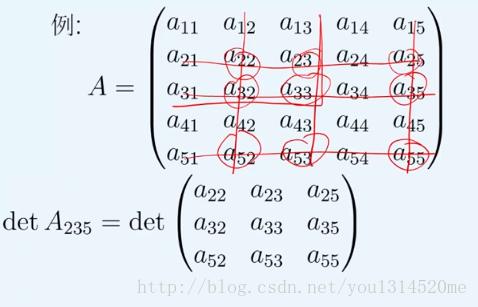
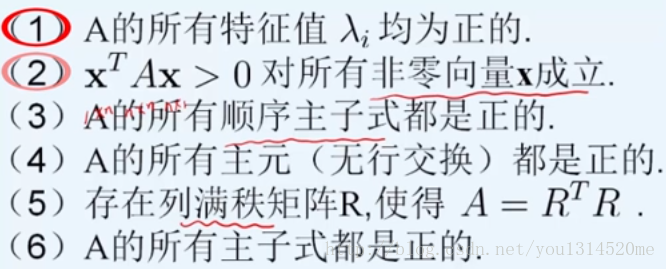
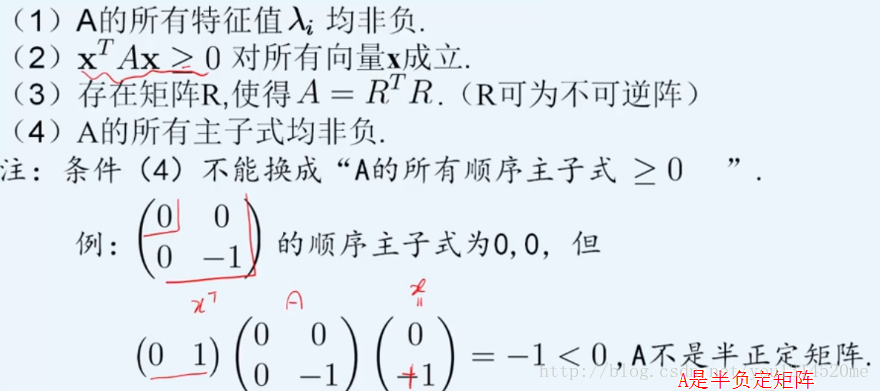
下列6项条件,满足任意一项即可判定实对称矩阵
A
A
A
###证明
(
1
)
⇒
(
2
)
:
(1)\Rightarrow(2):
( 1 ) ⇒ ( 2 ) :
A
A
A
Q
Q
Q
A
Q
=
Q
Λ
→
A
=
Q
Λ
Q
T
AQ=Q\Lambda \rightarrow A=Q\Lambda Q^T
A Q = Q Λ → A = Q Λ Q T
Λ
=
d
i
a
g
(
λ
1
,
 
.
.
.
 
,
λ
n
)
\Lambda=diag(\lambda_1,\,...\,,\lambda_n)
Λ = d i a g ( λ 1 , . . . , λ n ) 任意非零向量
x
x
x ,有
x
T
A
x
=
x
T
Q
Λ
Q
T
x
=
y
T
Λ
y
=
λ
1
y
1
2
+
 
.
.
.
 
+
λ
n
y
n
2
>
0
,
y
=
Q
T
x
=
(
y
1
,
 
.
.
.
 
,
y
n
)
≠
0
⃗
x^TAx=x^TQ\Lambda Q^Tx=y^T \Lambda y=\lambda_1 {y_1}^2+\,...\,+\lambda_n {y_n}^2>0, y=Q^Tx=(y_1,\,...\,,y_n) \ne\vec{0}
x T A x = x T Q Λ Q T x = y T Λ y = λ 1 y 1 2 + . . . + λ n y n 2 > 0 , y = Q T x = ( y 1 , . . . , y n ) ̸ = 0
(
2
)
⇒
(
1
)
:
(2)\Rightarrow(1):
( 2 ) ⇒ ( 1 ) :
A
x
=
λ
x
(
x
≠
0
)
Ax=\lambda x(x\ne0)
A x = λ x ( x ̸ = 0 )
0
<
x
T
A
x
=
x
T
λ
x
=
λ
∣
∣
x
∣
∣
2
0<x^TAx=x^T\lambda x=\lambda||x||^2
0 < x T A x = x T λ x = λ ∣ ∣ x ∣ ∣ 2
λ
i
>
0
\lambda_i>0
λ i > 0
(
2
)
⇒
(
3
)
:
(2)\Rightarrow(3):
( 2 ) ⇒ ( 3 ) :
(
2
)
⇒
(
1
)
⇒
(
3
)
d
e
t
A
=
λ
1
 
.
.
.
 
λ
n
>
0
(2)\Rightarrow(1)\Rightarrow (3)det A=\lambda_1\,...\,\lambda_n>0
( 2 ) ⇒ ( 1 ) ⇒ ( 3 ) d e t A = λ 1 . . . λ n > 0
(
2
)
 
0
<
(
x
k
T
0
)
(
A
k
∗
∗
∗
)
(
x
k
0
)
=
x
k
T
A
k
x
k
=
x
k
T
(
λ
1
.
.
.
λ
k
)
x
,
 
(
1
≤
k
≤
n
)
⇒
(
1
)
λ
i
>
0
,
(
1
≤
i
≤
k
,
1
≤
k
≤
n
)
⇒
(
3
)
d
e
t
A
k
>
0
,
(
1
≤
k
≤
n
)
(2)\, 0<\begin{pmatrix}x_k^T&0\end{pmatrix} \begin{pmatrix}A_k&*\\*&*\end{pmatrix}\begin{pmatrix}x_k\\0\end{pmatrix}={x_k}^T A_k x_k = {x_k}^T \begin{pmatrix} \lambda_1&\\&.\\&&. \\&&&. \\ &&&&\lambda_k \end{pmatrix} x,\, (1 \le k \le n) \\\Rightarrow (1) \lambda_i > 0,(1\le i \le k, 1 \le k \le n) \Rightarrow (3) detA_k>0, (1 \le k \le n)
( 2 ) 0 < ( x k T 0 ) ( A k ∗ ∗ ∗ ) ( x k 0 ) = x k T A k x k = x k T ⎝ ⎜ ⎜ ⎜ ⎜ ⎛ λ 1 . . . λ k ⎠ ⎟ ⎟ ⎟ ⎟ ⎞ x , ( 1 ≤ k ≤ n ) ⇒ ( 1 ) λ i > 0 , ( 1 ≤ i ≤ k , 1 ≤ k ≤ n ) ⇒ ( 3 ) d e t A k > 0 , ( 1 ≤ k ≤ n )
(
3
)
⇒
(
4
)
(3)\Rightarrow(4)
( 3 ) ⇒ ( 4 )
d
k
=
d
e
t
A
k
d
e
t
A
k
−
1
d_k={det A_k \over det A_{k-1}}
d k = d e t A k − 1 d e t A k
(
3
)
⇒
(
4
)
 
d
k
>
0
(3) \Rightarrow (4)\,d_k > 0
( 3 ) ⇒ ( 4 ) d k > 0
A
k
A_k
A k
k
k
k
(
4
)
⇒
(
2
)
(4) \Rightarrow (2)
( 4 ) ⇒ ( 2 )
A
=
L
D
L
T
A=LDL^T
A = L D L T
D
=
d
i
a
g
(
d
1
,
 
.
.
.
 
d
n
)
D=diag(d_1,\,...\,d_n)
D = d i a g ( d 1 , . . . d n )
L
L
L
L
T
L^T
L T
L
L
L
L
T
L^T
L T
L
T
L^T
L T
(
4
)
:
d
1
,
 
.
.
.
 
,
d
n
(4):d_1,\,...\,,d_n
( 4 ) : d 1 , . . . , d n
x
≠
0
⇒
y
=
L
T
x
≠
0
⇒
x
T
A
x
=
x
T
L
D
L
T
x
=
y
T
D
y
=
d
1
y
1
2
+
.
.
.
+
d
n
y
n
2
>
0
x\ne 0\Rightarrow y=L^Tx\ne 0\Rightarrow x^TAx=x^TLDL^Tx=y^TDy=d_1y_1^2+...+d_ny_n^2>0
x ̸ = 0 ⇒ y = L T x ̸ = 0 ⇒ x T A x = x T L D L T x = y T D y = d 1 y 1 2 + . . . + d n y n 2 > 0
可逆矩阵齐次方程只有零解
(
2
)
⇒
(
5
)
(2)\Rightarrow(5)
( 2 ) ⇒ ( 5 )
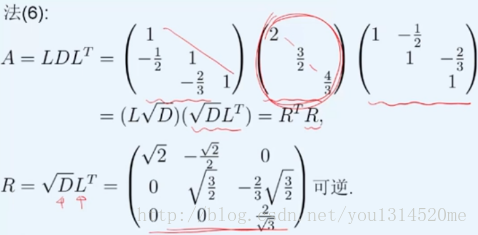
A
=
L
D
L
T
=
L
D
D
L
T
=
(
D
L
T
)
T
(
D
L
T
)
A=LDL^T=L\sqrt{D}\sqrt{D}L^T=(\sqrt{D}L^T)^T(\sqrt{D}L^T)
A = L D L T = L D
D
L T = ( D
L T ) T ( D
L T )
R
=
D
L
T
R=\sqrt{D}L^T
R = D
L T
D
,
L
T
\sqrt{D}, L^T
D
, L T
(
2
)
⇒
(
3
)
⇒
(
4
)
(2)\Rightarrow(3)\Rightarrow(4)
( 2 ) ⇒ ( 3 ) ⇒ ( 4 )
D
>
0
\sqrt{D}>0
D
> 0
∣
L
T
∣
>
0
|L^T|>0
∣ L T ∣ > 0
根据行列式性质:$ |A||B|=|AB|
,
当
, 当
, 当
∣
A
∣
>
0
,
∣
B
∣
>
0
→
∣
A
B
∣
>
0
|A|>0, |B|>0 \rightarrow |AB|>0
∣ A ∣ > 0 , ∣ B ∣ > 0 → ∣ A B ∣ > 0
A
B
AB
A B
或者:
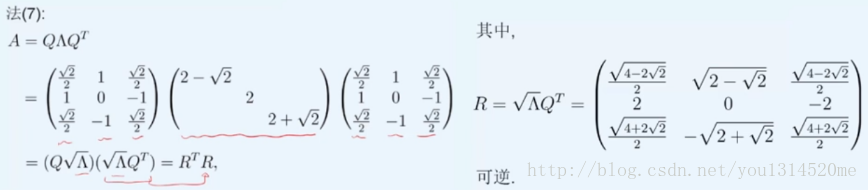
A
=
Q
Λ
Q
T
=
Q
Λ
Λ
Q
T
=
(
Λ
Q
T
)
(
Λ
Q
T
)
A=Q\Lambda Q^T=Q\sqrt{\Lambda}\sqrt{\Lambda}Q^T=(\sqrt{\Lambda}Q^T)(\sqrt{\Lambda}Q^T)
A = Q Λ Q T = Q Λ
Λ
Q T = ( Λ
Q T ) ( Λ
Q T )
R
=
Λ
Q
T
R=\sqrt{\Lambda}Q^T
R = Λ
Q T
(
5
)
⇒
(
2
)
(5)\Rightarrow(2)
( 5 ) ⇒ ( 2 )
A
=
R
T
R
⇒
x
T
A
x
=
x
T
R
T
R
x
=
(
R
x
)
T
R
x
=
∣
∣
R
x
∣
∣
2
≥
0
A=R^TR\Rightarrow x^TAx=x^TR^TRx=(Rx)^TRx=||Rx||^2 \ge 0
A = R T R ⇒ x T A x = x T R T R x = ( R x ) T R x = ∣ ∣ R x ∣ ∣ 2 ≥ 0
R
R
R
x
=
0
x=0
x = 0
x
T
A
x
=
∣
∣
R
x
∣
∣
2
>
0
x^TAx=||Rx||^2 > 0
x T A x = ∣ ∣ R x ∣ ∣ 2 > 0
(
5
)
⇒
(
2
)
(5)\Rightarrow(2)
( 5 ) ⇒ ( 2 )
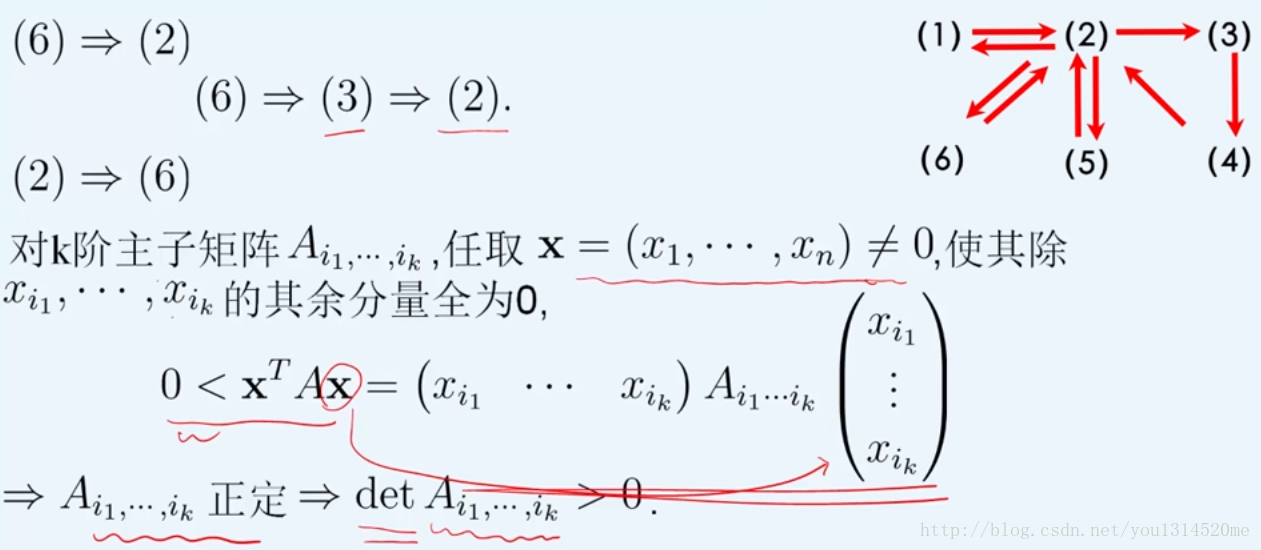
(
6
)
⇐
⇒
(
2
)
(6)\Leftarrow\Rightarrow(2)
( 6 ) ⇐ ⇒ ( 2 )
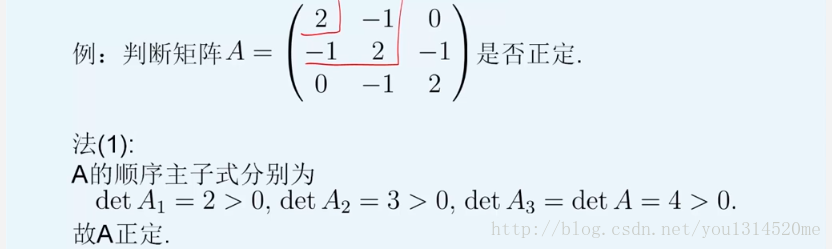
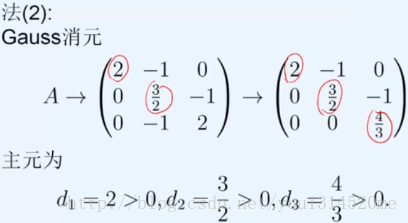
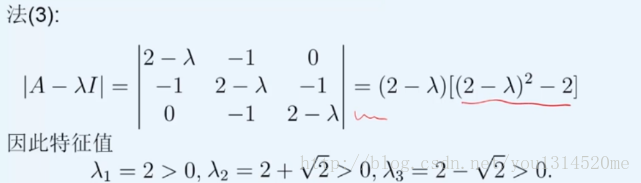
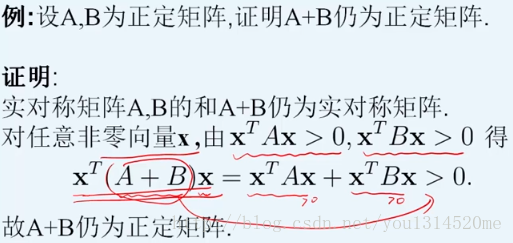
####典型例子
###如果
A
,
B
A,B
A , B
A
+
B
A+B
A + B
###如果
A
A
A
C
C
C
A
=
C
2
A=C^2
A = C 2
###如果
A
A
A
A
A
A
###如果
A
A
A
C
C
C
B
=
C
T
A
C
B=C^TAC
B = C T A C
注:其实B称为A的合同矩阵
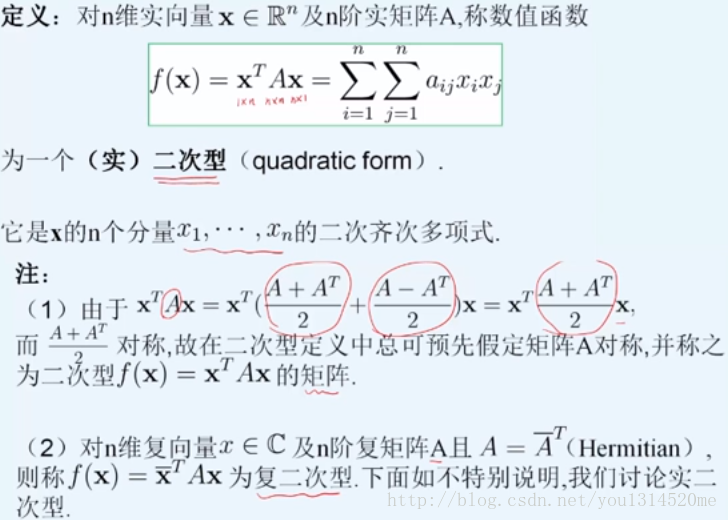
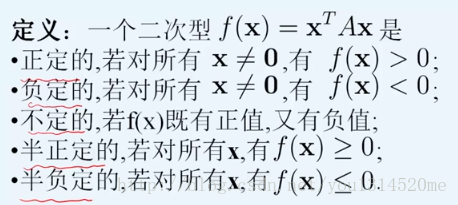
##二次型
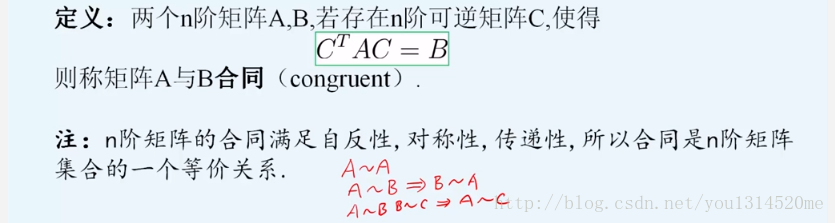
###定义
注意:这里证明里面
A
−
A
T
2
{A-A^T\over 2}
2 A − A T
x
T
A
−
A
T
2
x
=
0
x^T{A-A^T\over 2}x=0
x T 2 A − A T x = 0
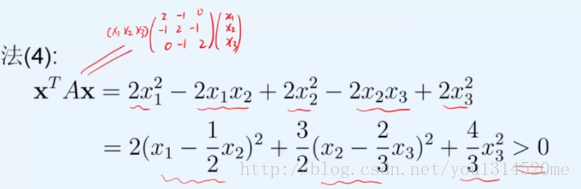
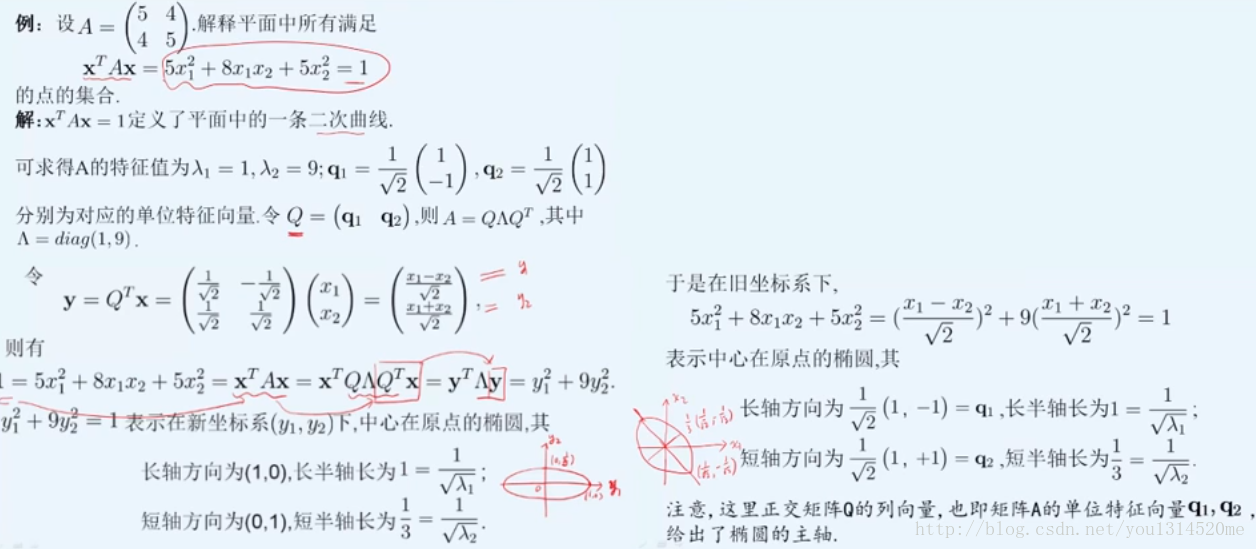
###例子
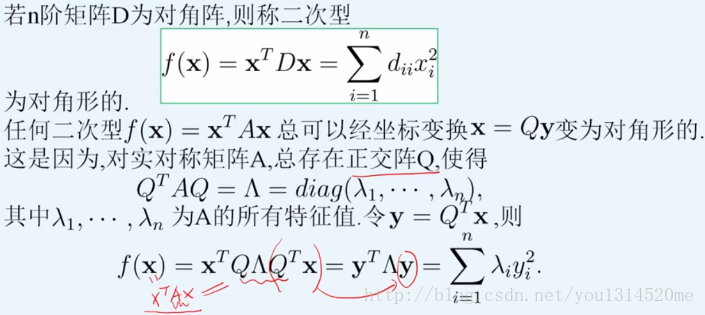
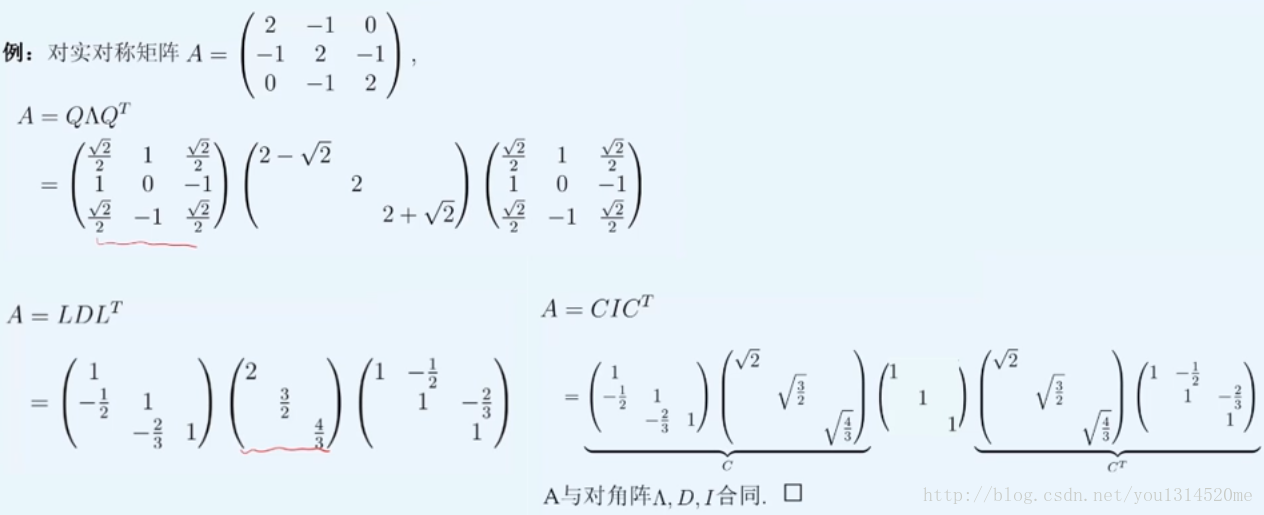
####二次型化成对角形
注:由于实对称矩阵
A
A
A
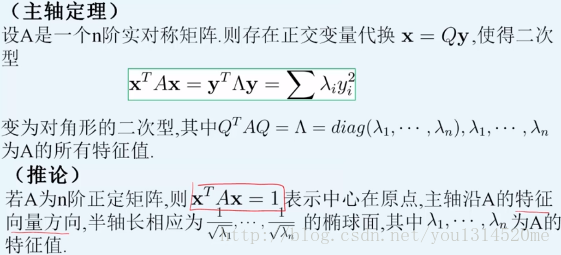
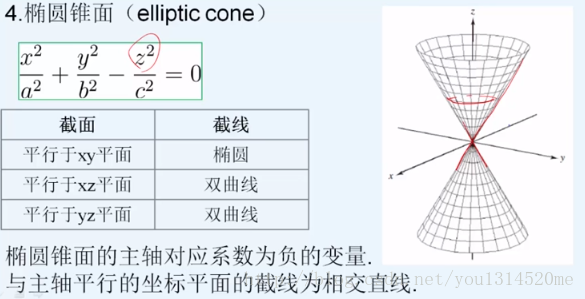
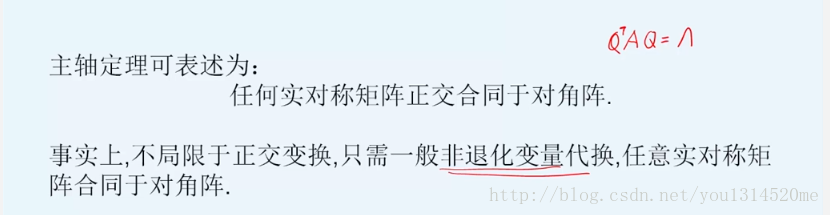
###主轴定理principal axis theorem
R
3
R^3
R 3
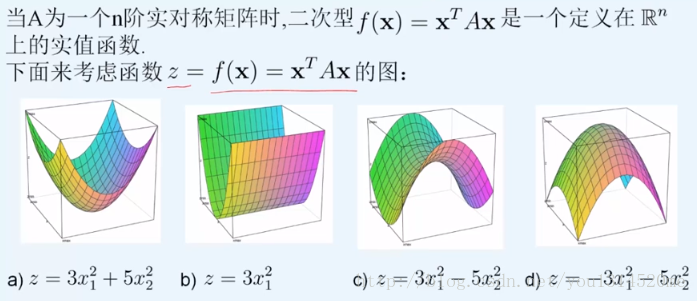
a
11
x
2
+
a
22
y
2
+
a
33
z
2
+
2
a
12
x
y
+
2
a
13
x
z
+
2
a
23
y
z
+
b
1
x
+
b
2
y
+
b
3
z
+
c
=
0
a_{11}x^2+a_{22}y^2+a_{33}z^2+2a_{12}xy+2a_{13}xz+2a_{23}yz+b_{1}x+b_{2}y+b_{3}z+c=0
a 1 1 x 2 + a 2 2 y 2 + a 3 3 z 2 + 2 a 1 2 x y + 2 a 1 3 x z + 2 a 2 3 y z + b 1 x + b 2 y + b 3 z + c = 0
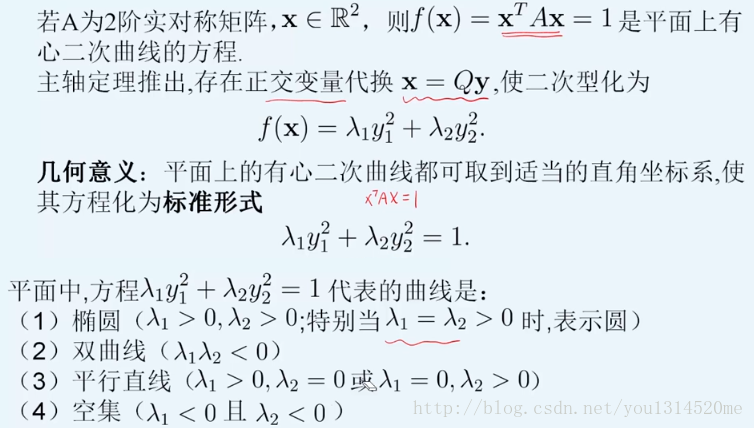
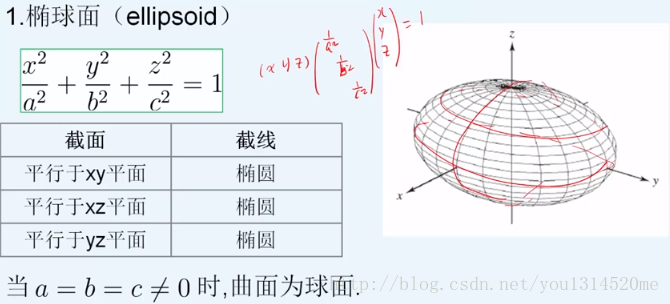
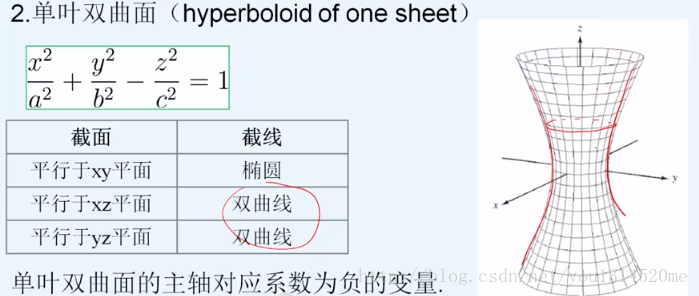
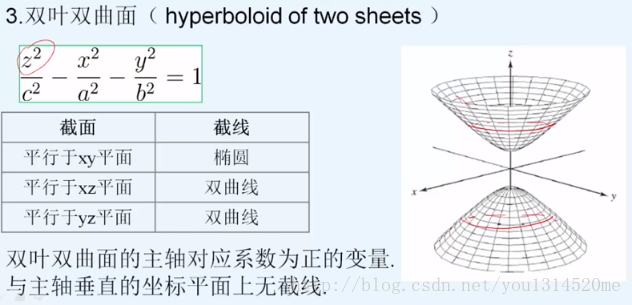
注:由于二次型可以与实对称对称矩阵一一对应,二次型里面又包括二次曲面,所以实对称矩阵可以跟二次曲面对应起来。
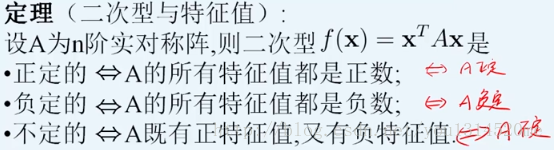
###二次型与特征值
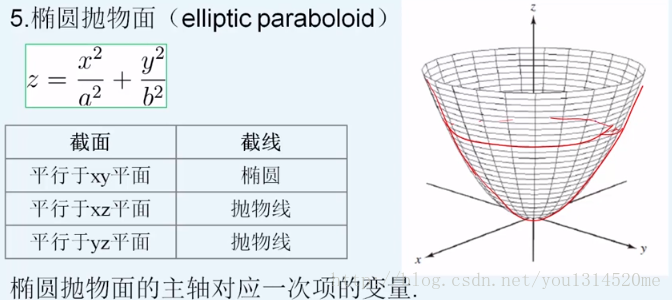
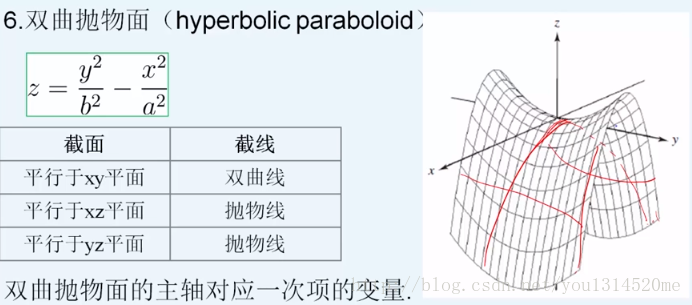
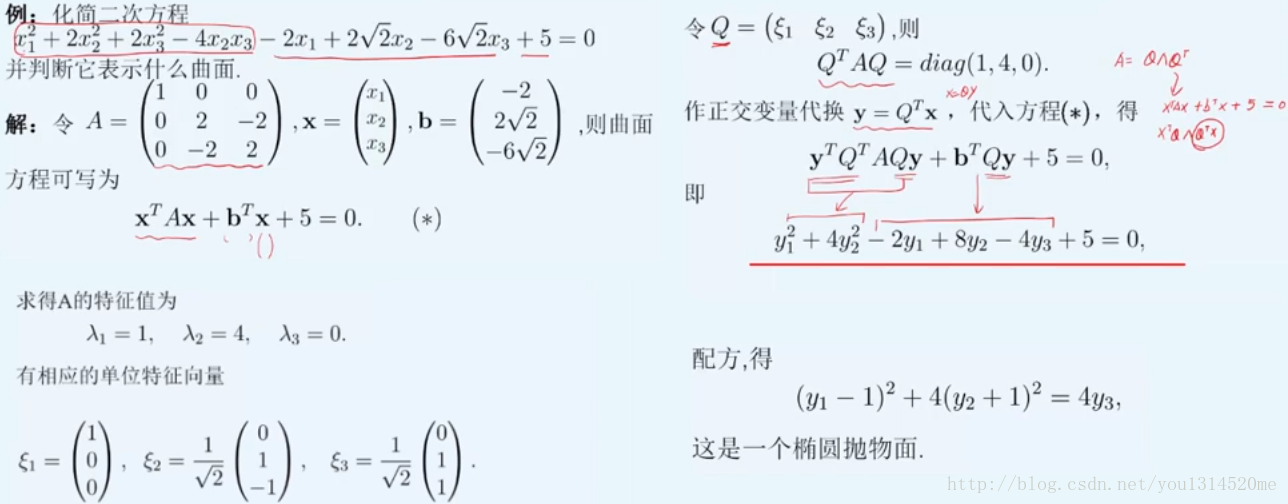
把二次型的部分去化成对角形的标准型,相应的这个一次项也作了变换,于是再做配方然后去跟基本的形状做比较得出这个曲面的几何形状,这是二次型的一个应用。
####前言
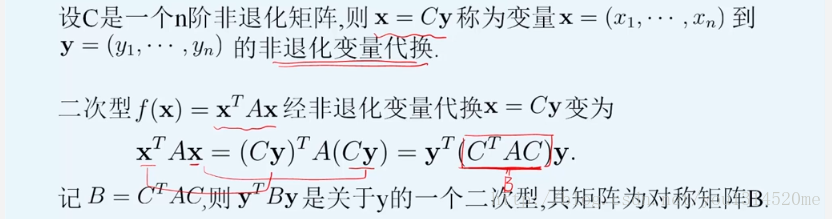
注:非退化矩阵即满秩矩阵
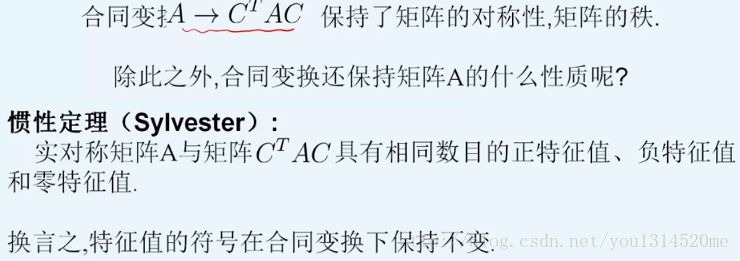
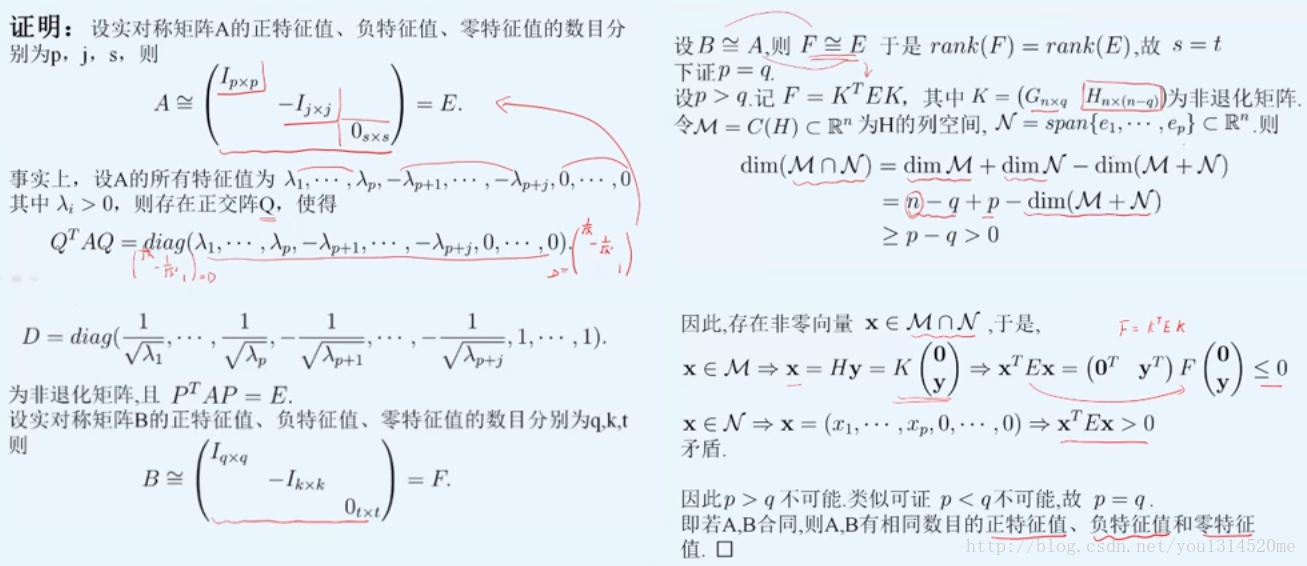
####合同的性质
证明:
A
A
A
C
T
C^T
C T
C
C
C
A
A
A
1.利用初等变换不改变矩阵的秩,因为可逆矩阵可以表示为初等矩阵的乘积,而A乘初等矩阵相当于对A作初等变换,所以A的秩不变-。这个方法包括了可逆矩阵左乘A,右乘A,或是左右同时乘A
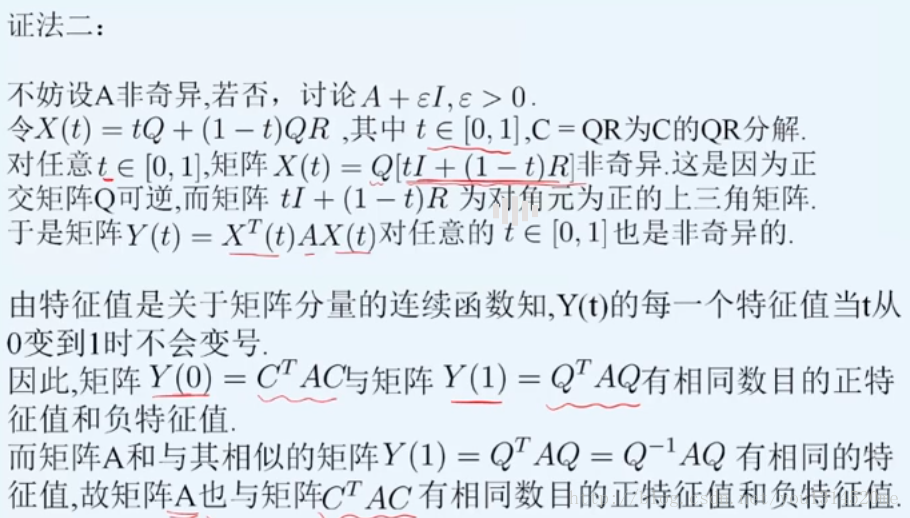
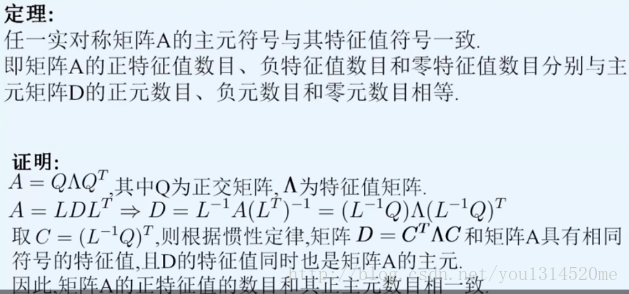
###惯性定理Sylvester’s law of inertia的证明
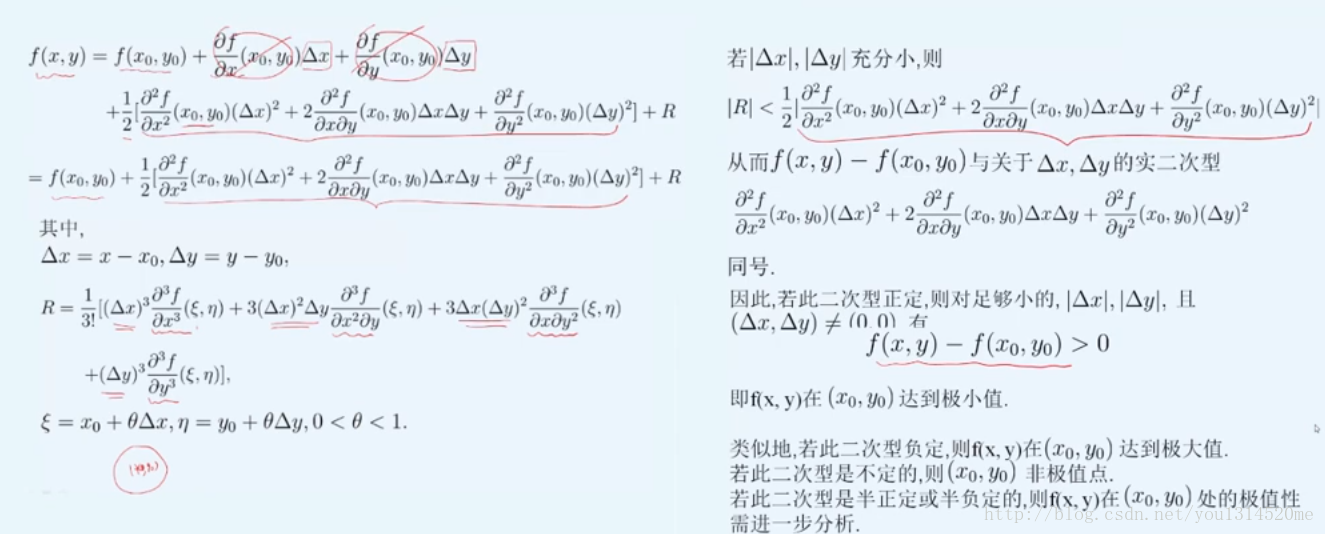
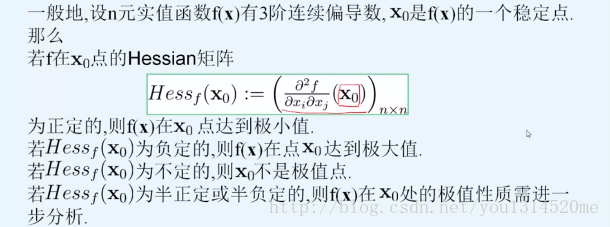
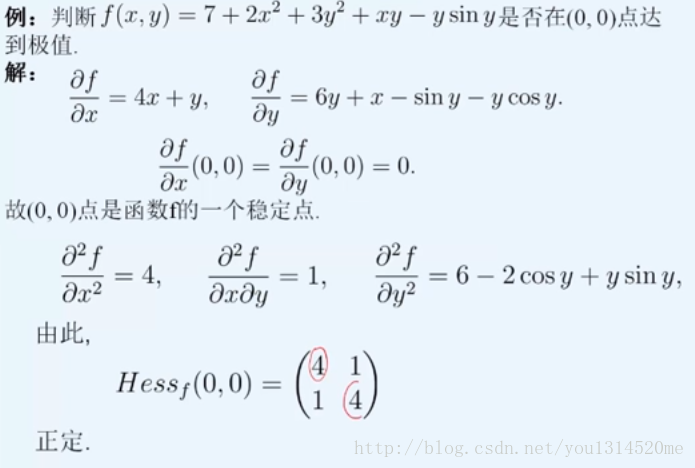
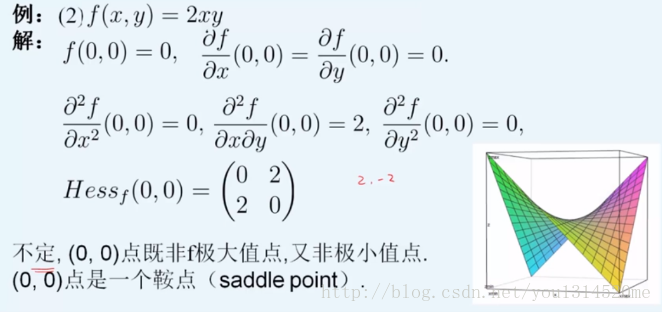
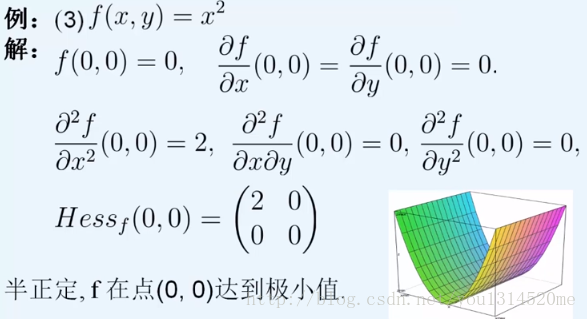
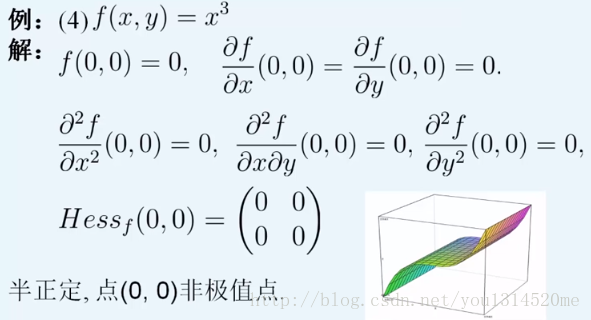
###正负定矩阵在函数极值中的应用
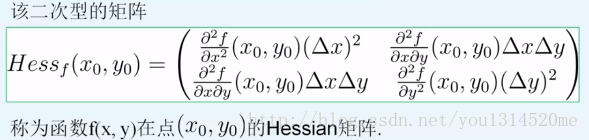
以二元函数
f
(
x
,
y
)
f(x,y)
f ( x , y )
(
x
0
,
y
0
)
(x_0,y_0)
( x 0 , y 0 )
f
(
x
,
y
)
f(x,y)
f ( x , y )
∂
f
∂
x
(
x
0
,
y
0
)
=
∂
f
∂
y
(
x
0
,
y
0
)
=
0
\frac{\partial f}{\partial x}(x_0,y_0)={\partial{f}\over \partial{y}}(x_0,y_0)=0
∂ x ∂ f ( x 0 , y 0 ) = ∂ y ∂ f ( x 0 , y 0 ) = 0
f
(
x
,
y
)
f(x,y)
f ( x , y )
(
x
0
,
y
0
)
(x_0,y_0)
( x 0 , y 0 )
f
(
x
,
y
)
f(x,y)
f ( x , y )
(
x
0
,
y
0
)
(x_0,y_0)
( x 0 , y 0 )
####黑塞Hessian矩阵
黑塞矩阵(Hessian Matrix),又译作海森矩阵、海瑟矩阵、海塞矩阵等,是一个多元函数的二阶偏导数构成的方阵,描述了函数的局部曲率。黑塞矩阵最早于19世纪由德国数学家Ludwig Otto Hesse提出,并以其名字命名。黑塞矩阵常用于牛顿法 解决优化问题,利用黑塞矩阵可判定多元函数的极值问题。在工程实际问题的优化设计中,所列的目标函数往往很复杂,为了使问题简化,常常将目标函数在某点邻域展开成泰勒多项式来逼近原函数,此时函数在某点泰勒展开式的矩阵形式中会涉及到黑塞矩阵。