本文仅用于记录自己在实现镭神C32激光雷达和PC机进行NTP同步时的一些总结。
吐槽在先,镭神的文档写极其不完善,很多都只是提了一句,但并没有完整的说应该具体怎么做。前前后后折腾了三四天,在一知半解的官方技术支持和实验室大佬的帮助下,最终完成了。
0. 激光雷达的同步
根据镭神使用说明书V2.6版,时间同步共有3种:GPS同步、NTP同步、外PPS同步。
 如果不用同步,在ROS下的驱动中,将
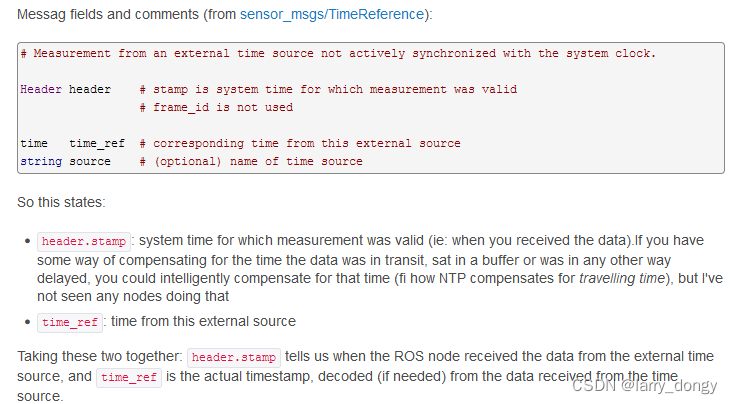
如果不用同步,在ROS下的驱动中,将time_synchronization设置为false则在驱动的lslidar_c32_driver.cpp中的poll()下每次打上ROS自己的时间戳。若开启了同步,则会发布一个名为sync_header的topic。这个消息类型是ROS的sensor_msgs::TimeReference类型,具体可查看相关说明,附截图如下:
- 其中GPS同步需要有一个GPS提供
GPRMC信息。此时雷达根据该信息设置雷达内部的UTC时间,并由自身的FPGA计时器获取微秒部分; - NTP同步,是每隔4s获取服务器的NTP授时,得到整数秒的部分,然后用自身的FPGA计时器获取微秒部分;
- PPS外同步是输出收到PPS信号后的us,此时没有UTC时间;
- 雷达内部计时,即上述所说的FPGA计时器,从上电后开始计时,最大到360e6,即1h。
了解完基本同步方式后,我选用NTP同步。
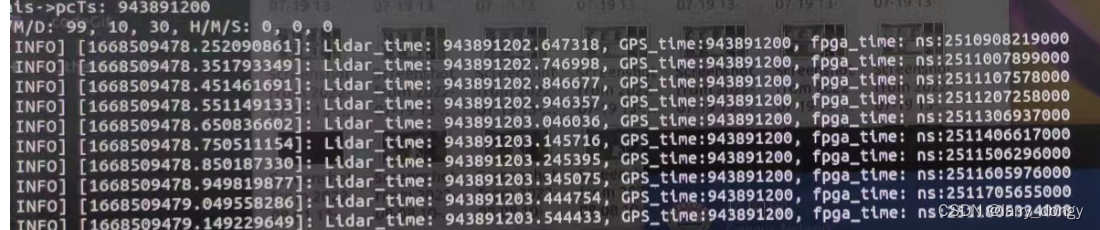
然而,单纯的将雷达launch文件中的time_synchronization设置为true后,得到的时间戳很奇怪,转化为UTC时间发现永远是一个恒定的数943891200(unix时间戳),对应UTC时间是1999年10月30日?并且每隔4秒会重置一次,确实是符合说明书中所说的“4s获取一次NTP授时,中间用FPGA计数”
 那接下来就要解决,如何获取真正的NTP时间,这个问题。
那接下来就要解决,如何获取真正的NTP时间,这个问题。
1. 关于NTP
关于NTP的内容,参考了这两个资料:
NTP原理-博客园
NTP服务介绍、配置、使用-bilibili
安装ntp相关内容
sudo apt install ntp
sudo apt install ntpstat
修改/etc/ntp.conf相关文件:
driftfile /var/lib/ntp/drift # 这个是将ntp参数临时存储的路径,保留当前状态,下次启动时可以载入;实测没什么太大的影响;
# 开放本机的任何访问
restrict 127.0.0.1 # restrict关键词是允许相应的ip访问,127.0.0.1是本机的
restrict -6 ::1
# 开放其他ip的访问
restrict 192.168.1.200 # 允许192.168.1.200这个ip访问本机的ntp,直接设置为雷达的对应ip
restrict 192.168.1.0 mask 255.255.255.0 # 直接允许192.168.1.0-255这个区间的ip访问
# 设置NTP同步时采用的服务器,按照顺序依次访问
# server IP 或 server 网址,两种写法均可,例如
server 114.118.7.161 # 采用中国国家授时中心的NTP
server 203.107.6.88 # 采用阿里的NTP
server ntp.aliyun.com # 采用阿里的NTP
# 上述指令最后可能存在 `nomodify` `notrap` `noquery`等词,表示禁止修改xxx,连接速度次数等限制,不加也不影响使用
server 127.127.1.0 # 采用本地时间作为时间服务;上述失效(例如没有联网时)将使用到这个。也可以把其他的都取消,只保留本地,在局域网内NTP,此时误差极小;
fudge 127.127.1.0 stratum 10 # 将本地server的层级设置为10,这是一个默认的数值,一般建议局域网设置为10以上。国家授时中心的层级是1,阿里的层级是2。
# 其他的参数暂时不用调整
修改后,需要重新启动ntp服务:
service ntp restart
经过5分钟(实测大概几十秒)后,能够通过ntpstat指令查看NTP同步的情况,如果刚重启,此时会显示 not synchronized,稍等片刻即可。此时同步到了local的ntp,层级是10+1:

除此之外,还可以用:
service ntp status # 查看NTP服务的状态,如果出现 active(running)则认为服务是启动正常的
ntpq -p # 查看NTP各个节点的同步状态。
完成本地NTP配置后,其他客户端连接到该PC,可以通过
ntpdate 192.168.1.102 # 102是本机PC的ip
指令同步到该机器的NTP时钟,并输出相关信息。至此,完成了PC段的NTP服务配置。
2. 镭神雷达端的配置
这部分坑我好惨。上述设置完,雷神雷达连接后,依旧是99年10月30日。于是,我开始去查源码。
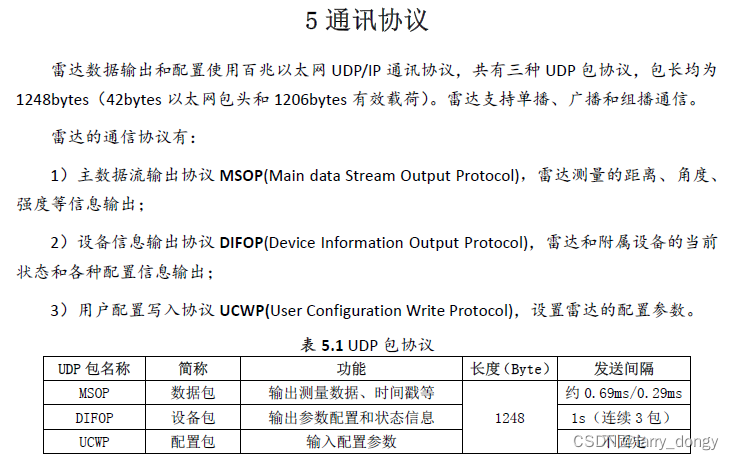
根据手册,镭神雷达共有3种UDP包协议,长度均为1248bytes,分别是:
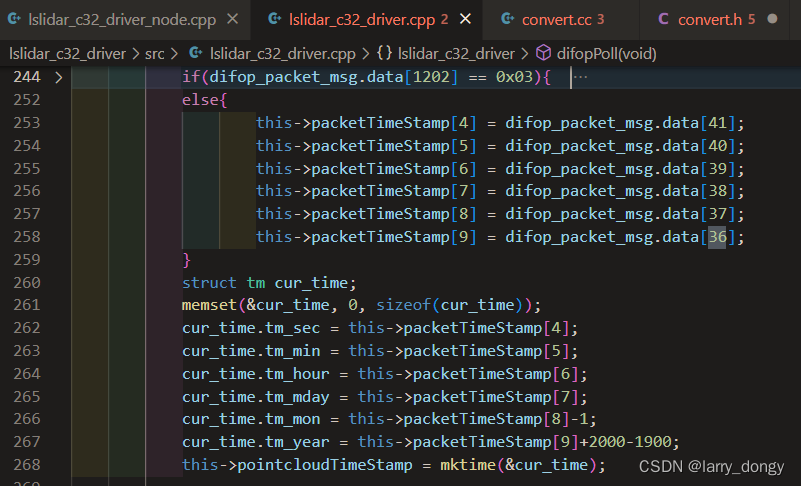
时间戳这块来自于DIFOP设备包,查看设备包的定义:

可以看到,里面是包含了UTC时间的,即数据部分的36-41,在代码中可以看出,确实是从36-41提取了UTC,然后mktime转化为了当前点云的时间戳。可以看出,1202位表示版本,我们用的是2.6版,代码中0x03我推测是3.0版,此时的协议用了预留的52-57字段。但问题是,此时的UTC时间,没有读取到我PC的NTP时间。
显然此时是没有读取到NTP的时间,此时我又看到下图中以太网配置存在“NTP服务器地址”,怀疑是不是这个NTP服务器地址并没有设置?
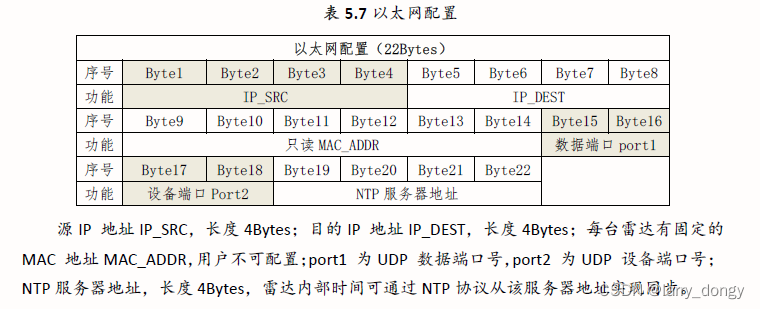
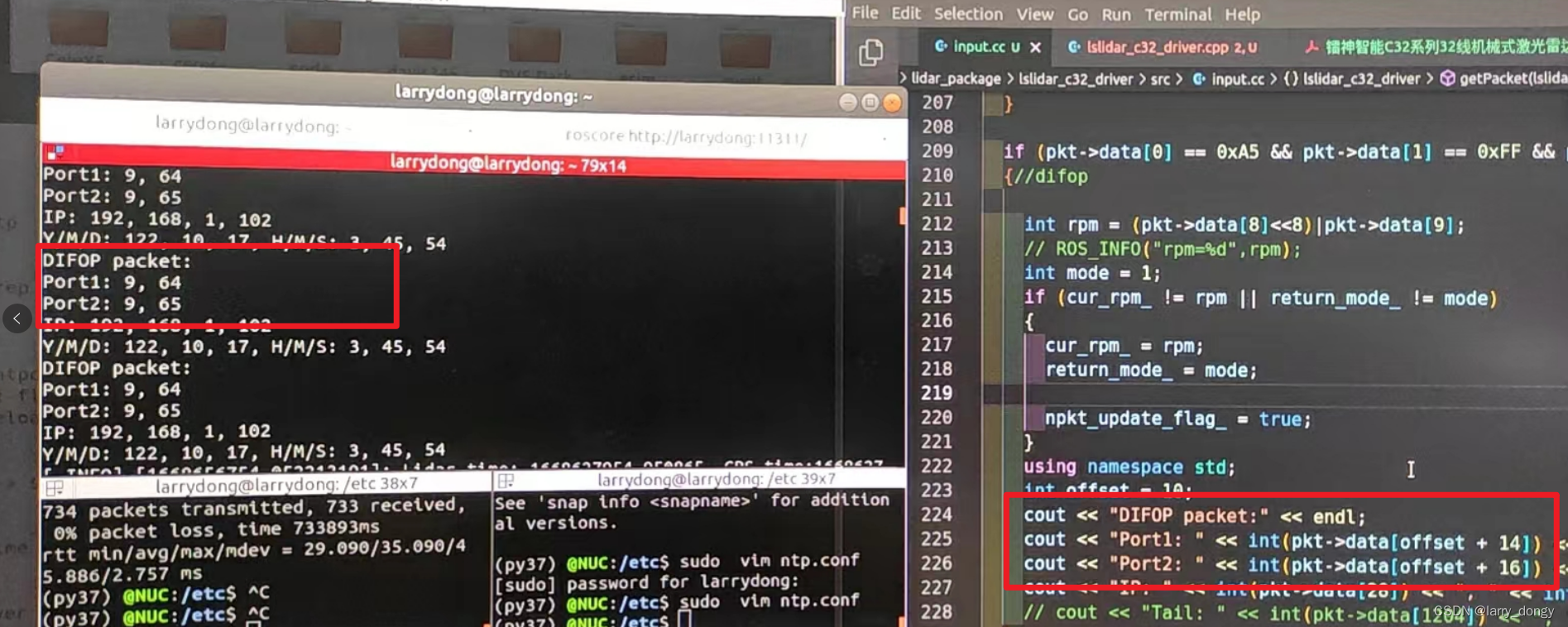
于是我在对应代码接收设备包的部分,输出了NTP的服务器地址,发现是 0,0,0,0(下图中我是我已经改了NTP服务器地址,改为了192.168.1.102后的截图)。同时我输出了端口port1和port2,发现是“9 64”和“9 65”,即大端模式下2368和2369,这证明我这22字节的以太网配置读取没问题。
 所以,此时需要修改NTP服务器地址!NTP服务器地址的修改,需要PC端发送配置包如下:
所以,此时需要修改NTP服务器地址!NTP服务器地址的修改,需要PC端发送配置包如下:

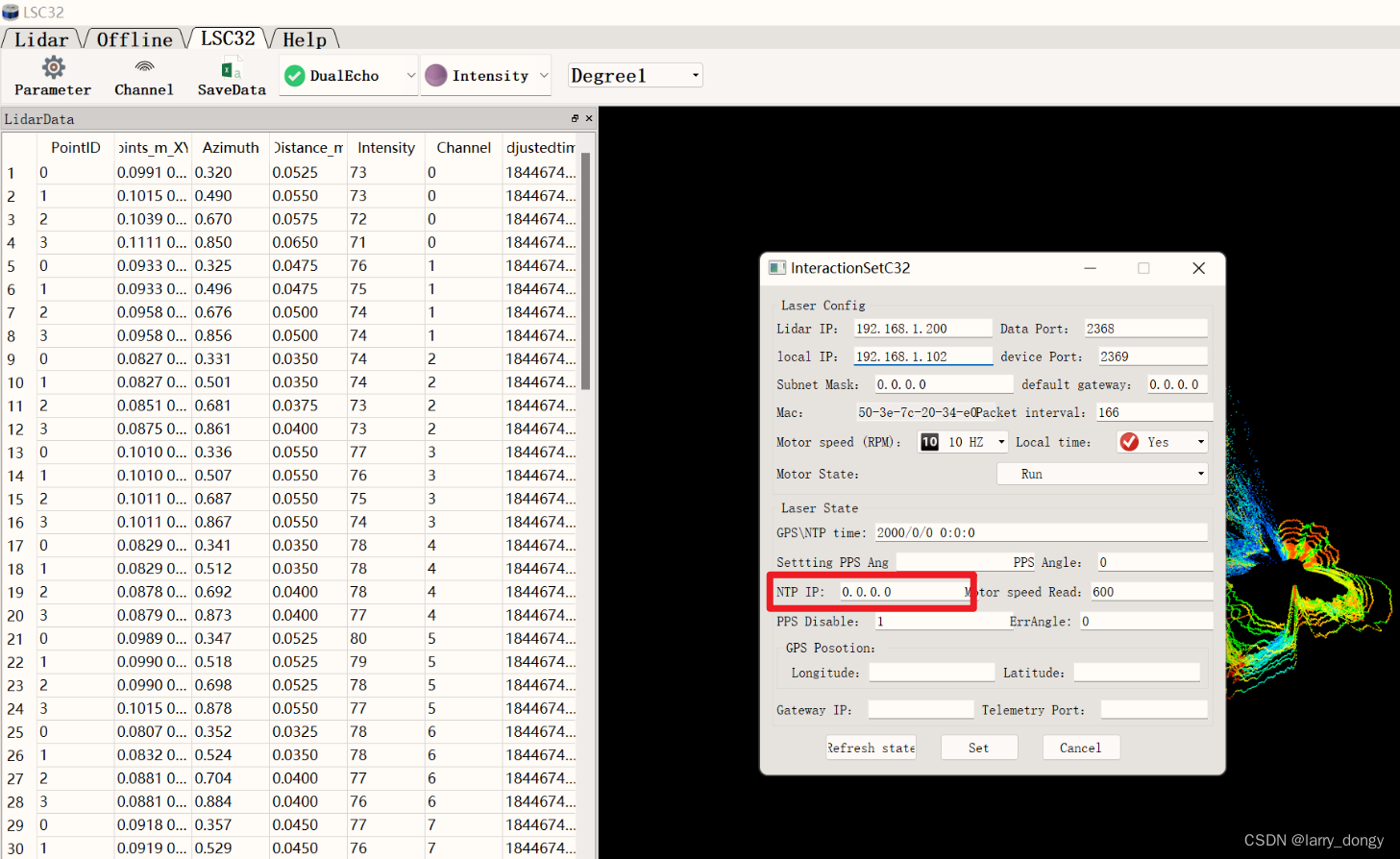
然而ROS下驱动并没有提供配置包的发送例程,因为镭神手册中写到:“推荐用户通过Win点云软件配置雷达,禁止客户自行打包配置雷达参数”,所以也就是不能用ROS改了。于是,打开了win下软件,在配置中找了下,果然有一个NTP的地址,而且默认了四个0,于是修改这个为192.168.1.102后,再插回ROS的PC机,同步成功。
但需要注意的是,雷达返回的UTC时间戳并不是+8区,而PC机本身存在+8,所以时间不完全一致(上面输出DIFOP的截图中,时间是122(即1900+122=2022)年(10+1)月17日凌晨3点45分54秒,实际上是中午11点45。这个后面再调吧,小问题。
小结
折腾了半天,学习了NTP,仔细翻阅了雷达驱动源码,收获颇多。