Ubuntu16.04+ROS Kinetic
激光雷达型号:北洋(hoku) URG-04LX-UG01
一、读取激光雷达数据
参考:ROS Kinetic通过hokuyo_node驱动从USB读取URG-04LX-UG01雷达数据
Hokuyo的ROS驱动有urg_node和hokuyo_node两种,但其中的 hokuyo_node驱动包并没有提供kinetic版本的deb包,因此无法通过apt-get install的方式直接安装,本文通过从源代码编译的方式在Kinetic安装hokuyo_node驱动包。
第一步:打开一个新终端,配置ROS环境变量;
source ~/catkin_ws/devel/setup.bash第二步:从github下载源代码到~/catkin_ws/src文件夹下并通过catkin_make编译;
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/driver_common.git
cd ..
catkin_make
cd src
git clone https://github.com/ros-drivers/hokuyo_node.git
cd ..
catkin_make
第三步:修改串口权限;
sudo chmod a+rw /dev/ttyACM0第四步:打开一个新终端,运行roscore;
source ~/catkin_ws/devel/setup.bash
roscore再打开一个新终端,运行hokuyo_node节点;
source ~/catkin_ws/devel/setup.bash
rosrun hokuyo_node hokuyo_node第五步:打开一个新终端,查看是否正常接收雷达数据;
source ~/catkin_ws/devel/setup.bash
rostopic echo /scan第五步成功的话应该显示如下结果:

第六步:在rviz中显示/laser_scan消息包含雷达数据点;
(1)如果没安装rviz,根据ROS官网的教程安装一下http://wiki.ros.org/rviz/UserGuide;
(2)打开一个新终端,运行rviz;
source ~/catkin_ws/devel/setup.bash
rosrun rviz rviz
(3)添加/laser_scan消息并以点云的形式显示出来;
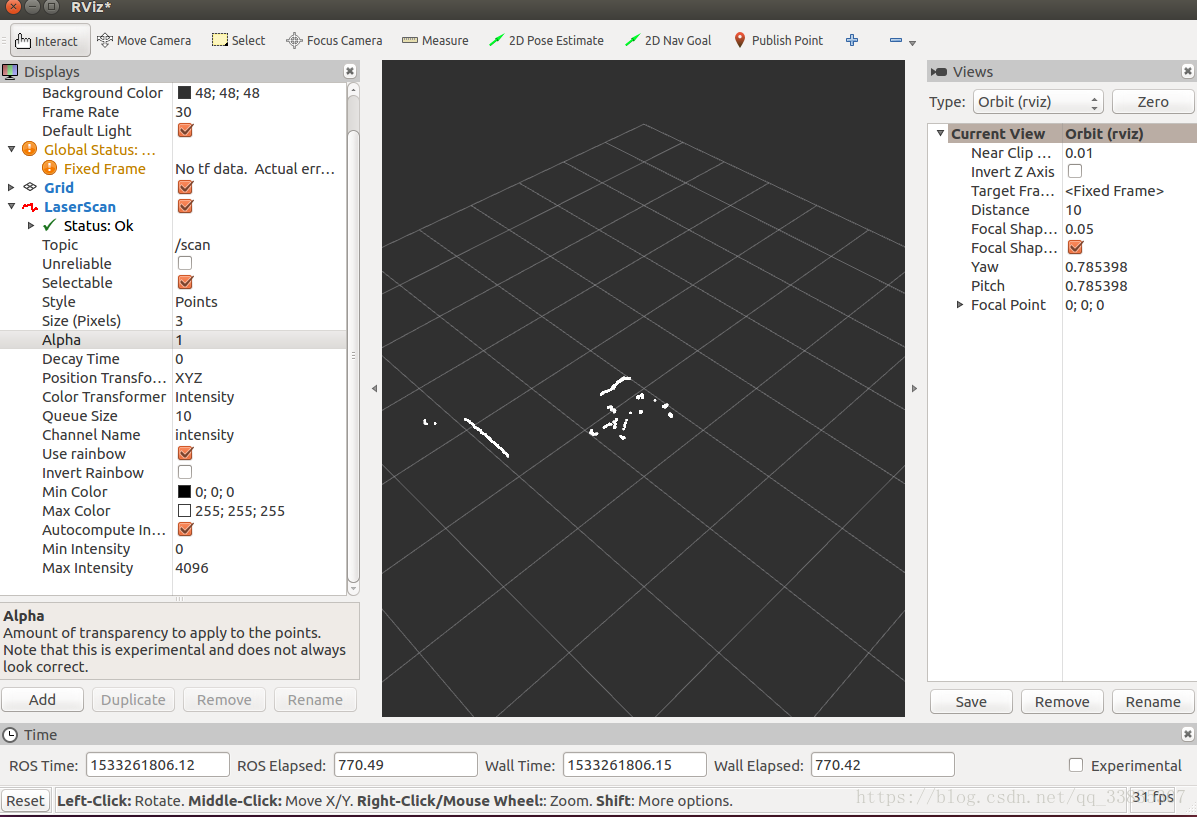
(1)点击rviz左下角Add,添加LaserScan;
(2)点击Global Option下方的Fixed Frame,将右边的参数改为laser;
(3)点击LaserScan下面的Topic,改为/scan;
(4)点击LaserScan下面的Style,改为Point;
一切正常的话结果如上图所示。
https://answers.ros.org/question/251060/how-to-use-an-usb-hokuyo-laserscanner-in-ros-kinetic/
http://wiki.ros.org/rviz/UserGuide
https://blog.csdn.net/Changer_sun/article/details/77618611