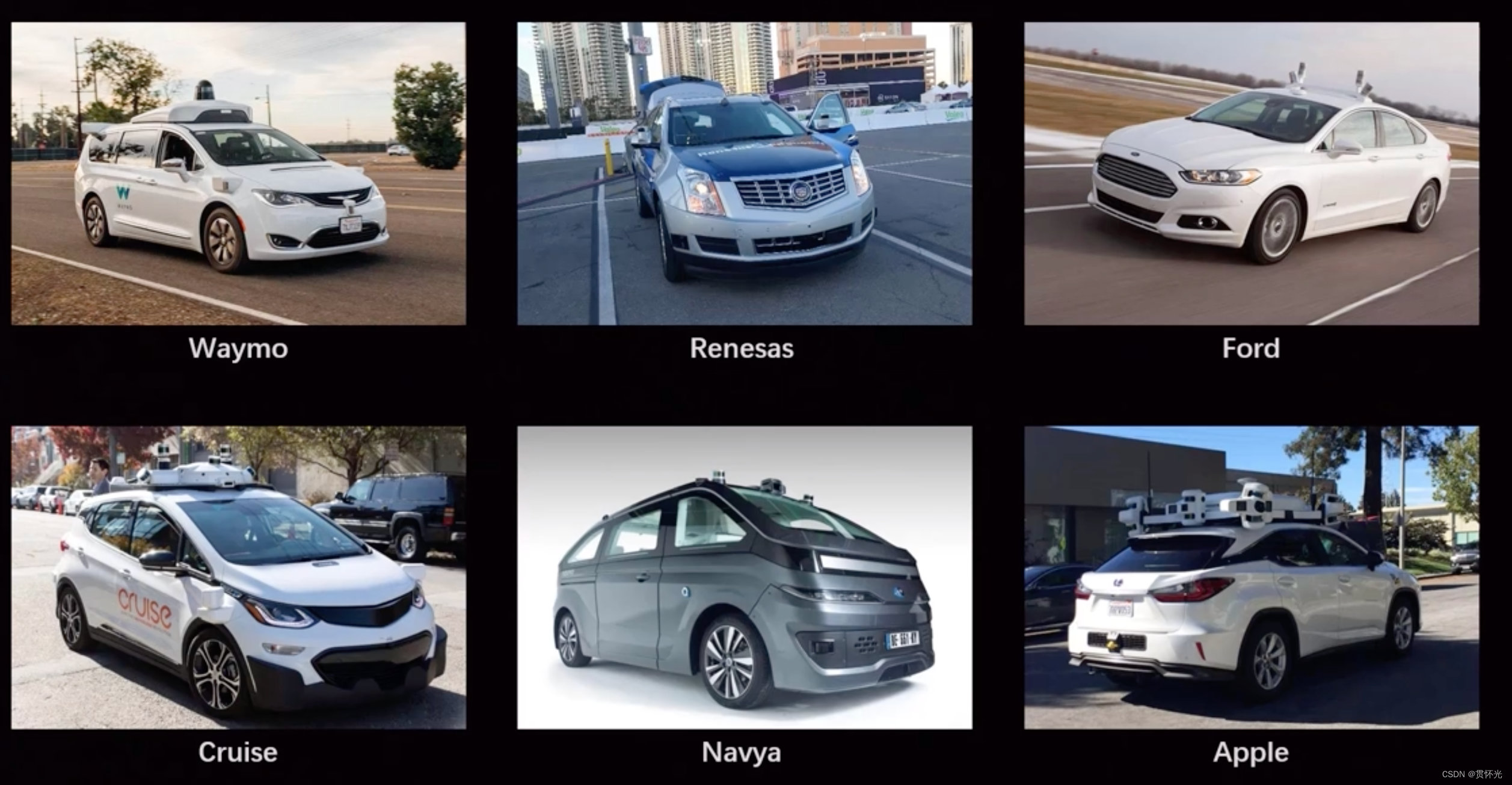
激光雷达的应用方案
激光雷达硬件平台
激光雷达:速腾聚创,以他们的自动驾驶的设计来进行讲解。更好的把握前沿。依赖于自动驾驶厂商来搭建自动驾驶的系统。
如商汤、百度也好也都依赖于自动驾驶的厂商,提供什么方案来进行研制产品
- 整个系统包括:激光雷达、图像、双边线的GPS、GNSS和IMU惯性导航系统,并且为了方便使用,我们连在同一个刚体结构之中。以这个来作为自己的实验平台。

LIDAR在智能化驾驶中的应用案例
在量产车上和常用车上

SCALA在L3级进行一个很好的应用:目前很多主机厂在如主动安全,车道线的功能做了一些量产,后面会有很多只能
系统方案集成:
-
超声波传感器:基于声波,多路径效应比较长,对于倒车雷达时足够的,因为他距离越长发展效应越明显。
-
相机:有些主机厂,前装已经有了,需要在侧面,后视镜的脚下加入相机,可以获取全景/鸟瞰图的图像,可以防护周围的安全。但是他的范围比较狭窄:如车道线等
-
前视相机:可以参考特斯拉的方案,前面放入三个相机(广角、超长距、中距)。因为相机方案获取的信息最多,前视相机也具有一个盲区的问题
-
LiDAR:毫米波雷达,相对于激光雷达的优点是可以进行测速。毫米波雷达,他可以工作在一个平面上,探测距离长,可以很好的客服雨雾天气,可以很好的主动安全,可以很好的前置跟踪。
-
LiDAR:雷达
-
高精度的地图
-
360度的相机旋转
激光雷达主要传感器的对比
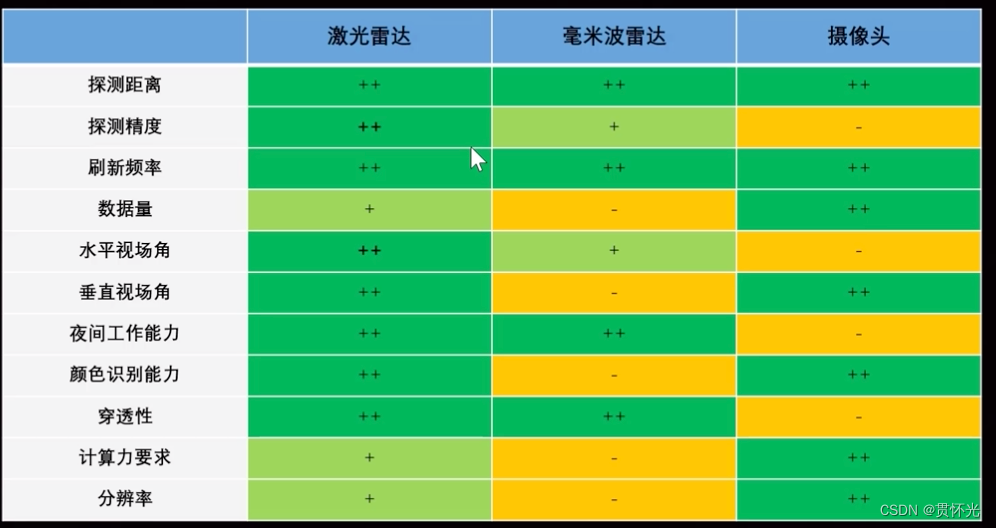
对比激光雷达、毫米波雷达、摄像头等
- 激光雷达和毫米波是主动探测,相机是被动探测,相机的工况是比较好的。
- 在距离上来说,激光雷达和毫米波是比较好的,毕竟超过200米的范围是比较高的。另外一点,相机也是比较好的,比如焦距我们可以采用超长焦,来去探测很远的。如图森卡车视觉系统新突破,最大测距达到1000米,激光雷达的测距一般在200-300米,测绘领域的激光一般是单线激光。
雷达的应用
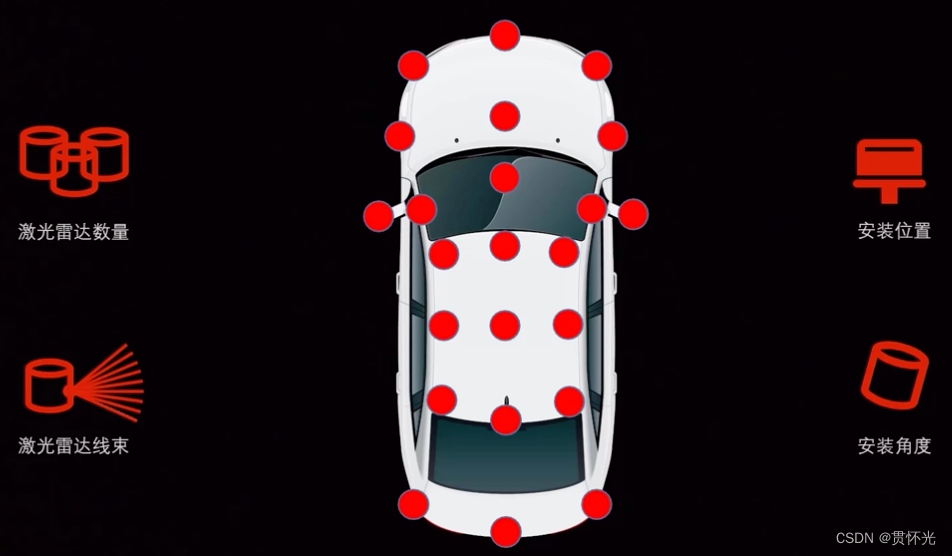
默认的在顶部,比如360度的视角。可以感知周围,激光雷达安装是需要考虑数量,如单线耦合的用。如4个16线的可以达到128线的效果。另外安装的位置,线束可以达到很好的效果。
激光雷达可以做
如何提高激光雷达感知能力:激光雷达也是受到视角的影响,同一个感知物体在不同方面是局部的,激光雷达可以采用少线多个来进行多个耦合,可以弥补更更好的陈
多传感器数据融合
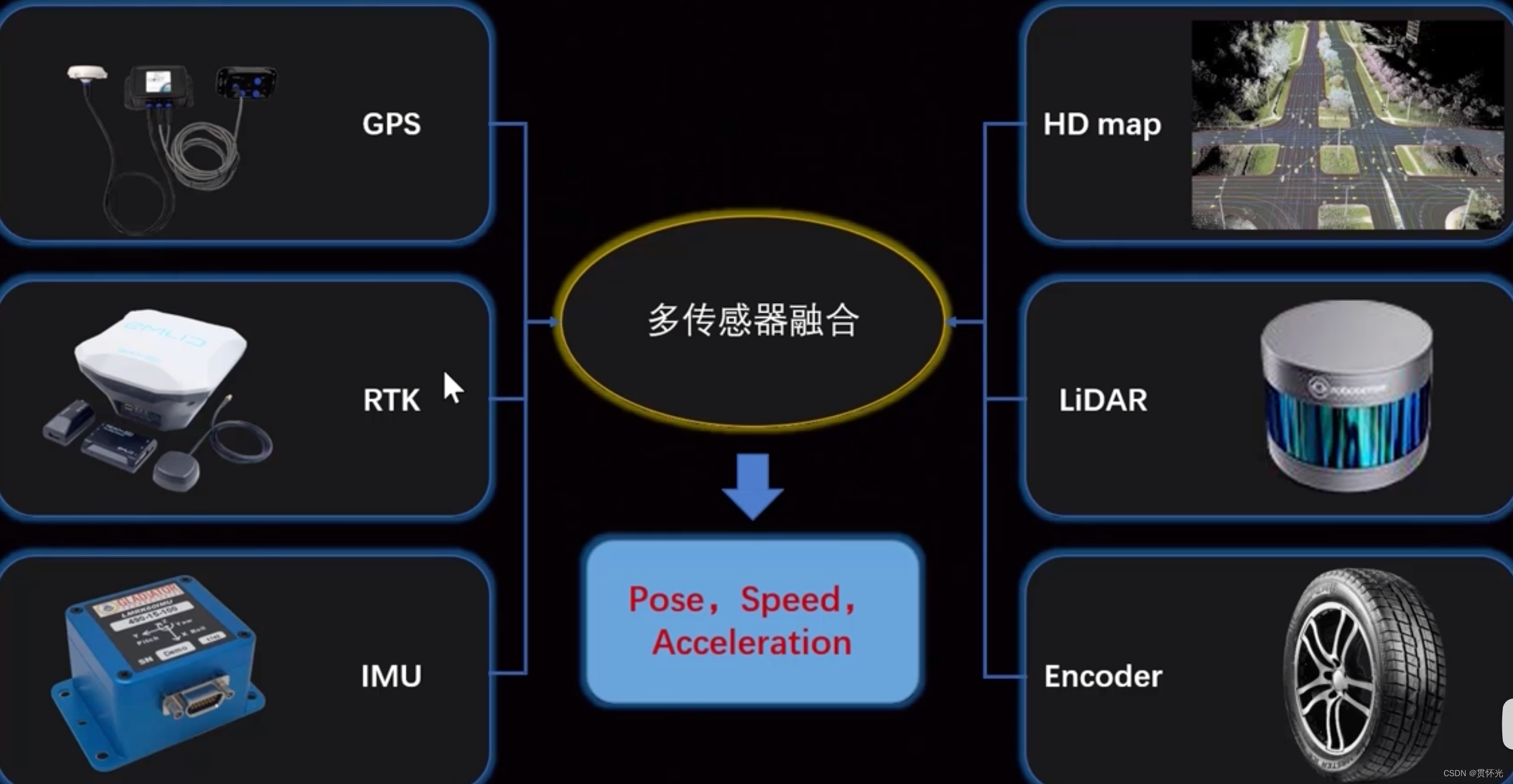
是并不可少的话题,如何融合更多的信息来获取更鲁邦的感知和定位能力,可以通过高精地图等获取其:位姿、速度、加速度来进行更好的定位
激光雷达系统方案
单线激光雷达有很大盲区,整个时常角肯定是受限的。肯定不能商用的,需要进行耦合的系统,来进行实现的。
速腾提出两个方案P3和P5的方案:

上图是RS-Fusion-P3:
通过32线来进行主视雷达,两个16线来进行侧视雷达,来弥补车的两边的盲区,以及拿到更精密一个点云稠密度。以及很强大的工控机作为硬件平台。
如何进行挑选激光雷达
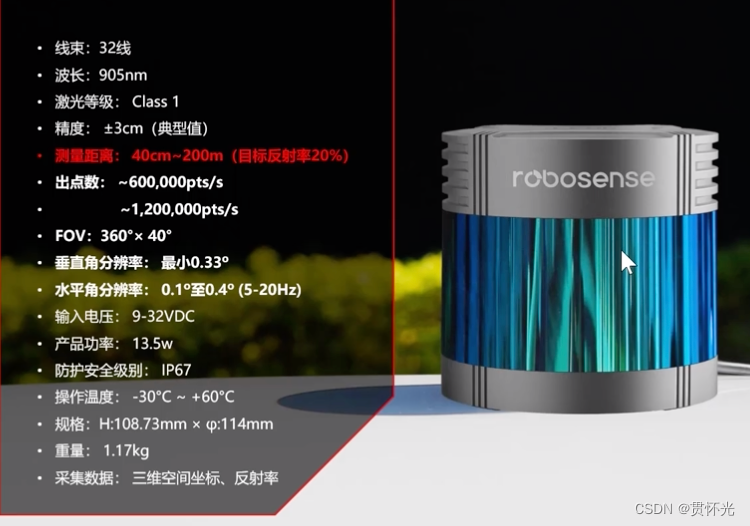

- 我们平常说的是线束:16线、32线、128线、300-500线。线束的增加可以提高更好的光束操控的能力。可以提高发射光阻的模组的增加。
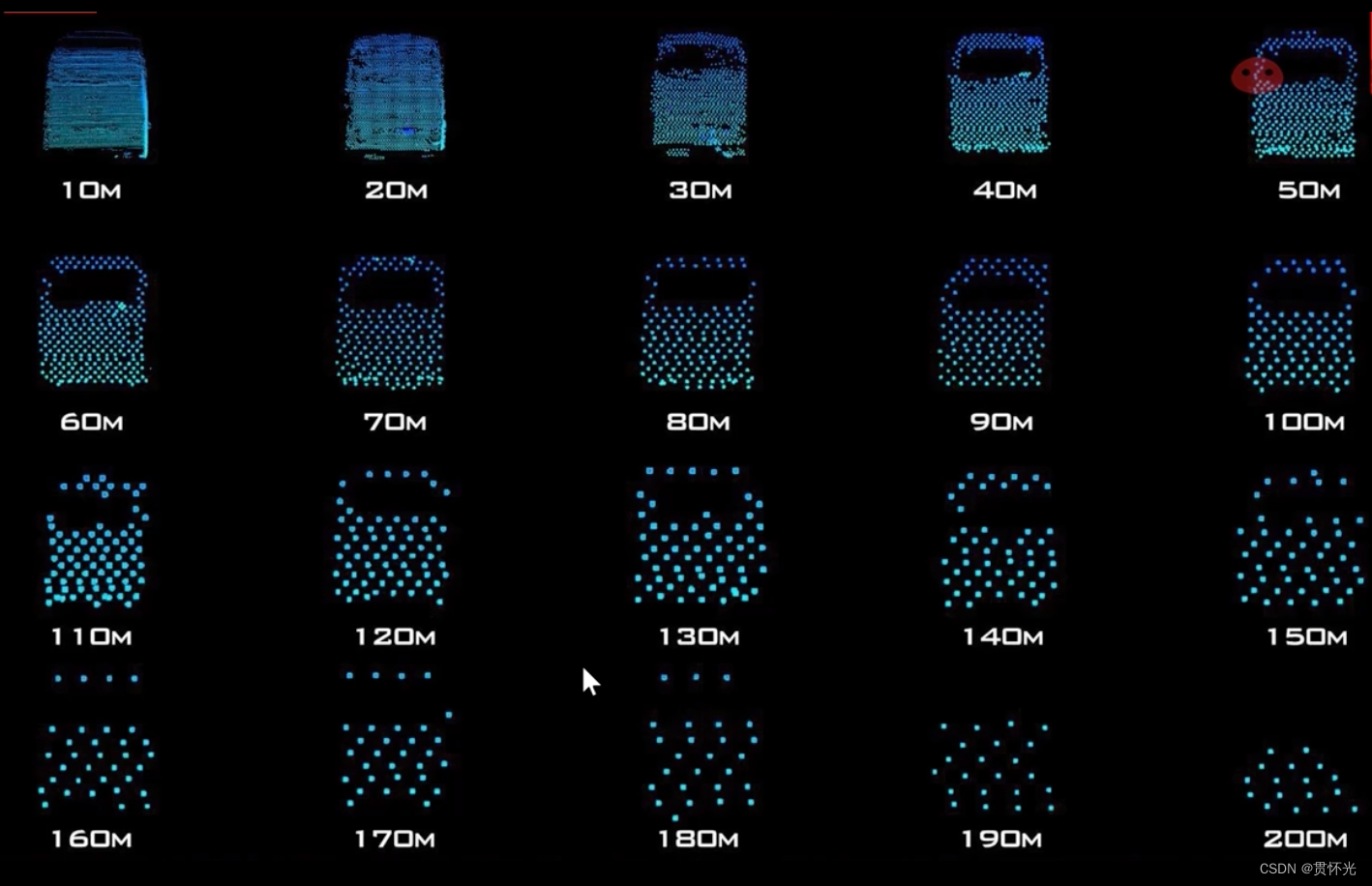
- 精度和测量范围:上图的测量范围是40cm-200m。因为光速近距离的感知能力依赖于时间测量精度,越近距离感知能力误差越大。更远距离依赖于感测器,接受光阻的,依赖于发生光祖的分辨率和接受光祖的分辨率。也是有一定的影响。在实际应用中,200米的实际遮挡不会达到200米。如高速城市场景。并且200米会存在很多噪点等等。
- 一般情况激光雷达输出刷新频率是10HZ,10Hz也控制了电机的转速,电机的转速也控制了出点数等。基本上在60w-100w的点
- 分辨率:激光雷达有个特性是他的时常角,通过扇形面进行扫射出去,扫射的最关键部分是中间部分。上下的不同角度会比较稀疏,前面的是比较集中的。垂直分辨率是0.33
16线价格甚至可以可以到千元/百元
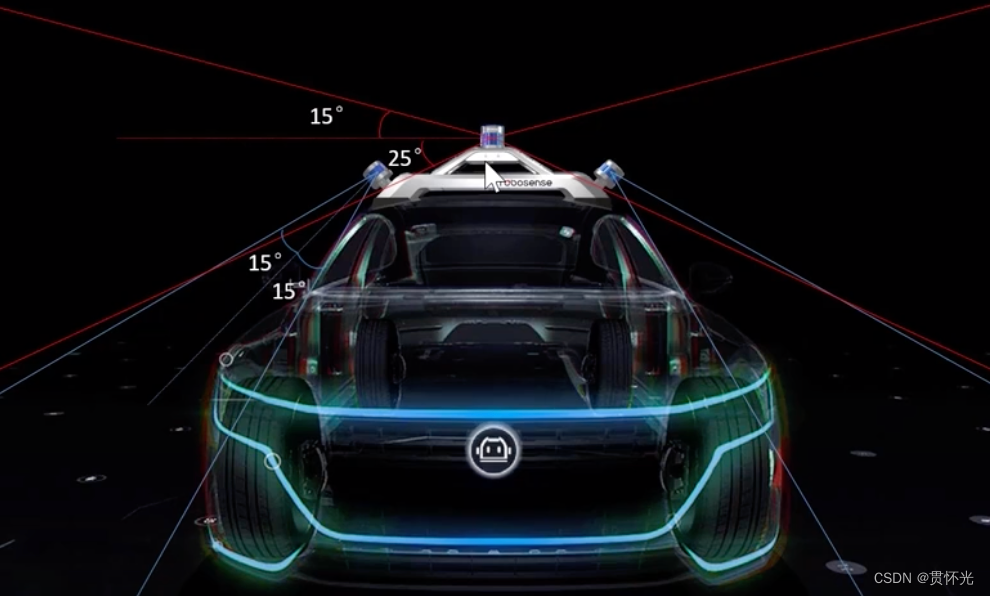
- 时常角:一般情况是40度,40度意味着是上15度,下25度。因为激光雷达更关心路面的场景
- 16线的一般是上15度,下15度来进行具体的感知。这样的话也就是说一辆车的安装高度决定着他周围的感知能力。这样的话,相比于摄像头的视野会更加狭窄,需要买比较广角的才你可以拿到比较广角的效果。平常都在30-40度。
- 鱼眼相机的感知会更多,但是需要做更多的去畸变等操作。

耦合平台的效果是正常的,而周围的16线可以更好的弥补周围的安全感知,因为周围的安全感知是更加重要的额,也是坚固了一些盲区。16线完全在车周围,效果也是比较明显的。
RS-Fusion-P5:RoboTaxi激光雷达解决方案
比较新颖的方案,也是根据自动驾驶的场景来进行适配。
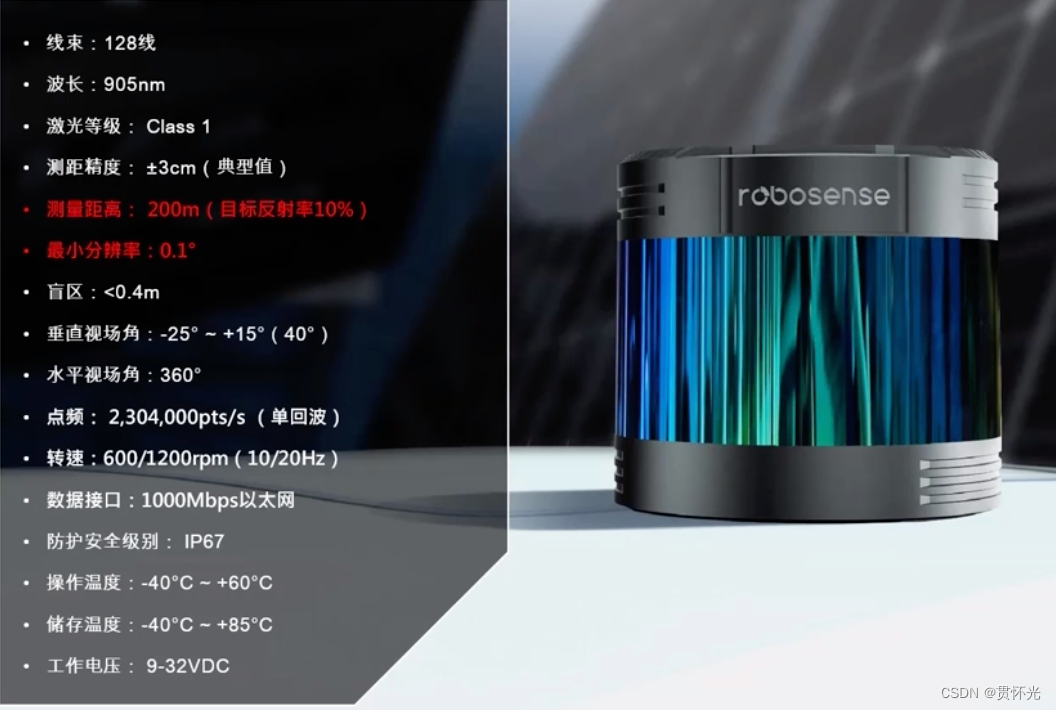
通过128线的Ruby的激光雷达作为主视雷达,包括他的探测的距离和线束都是比较稠密的,解决盲区问题。
对比16线的雷达,128的探测距离是比较远的,16线的只能感知比较远的。但是16基本感知能力也就是在周围。如何适配近距离的雷达比较好的
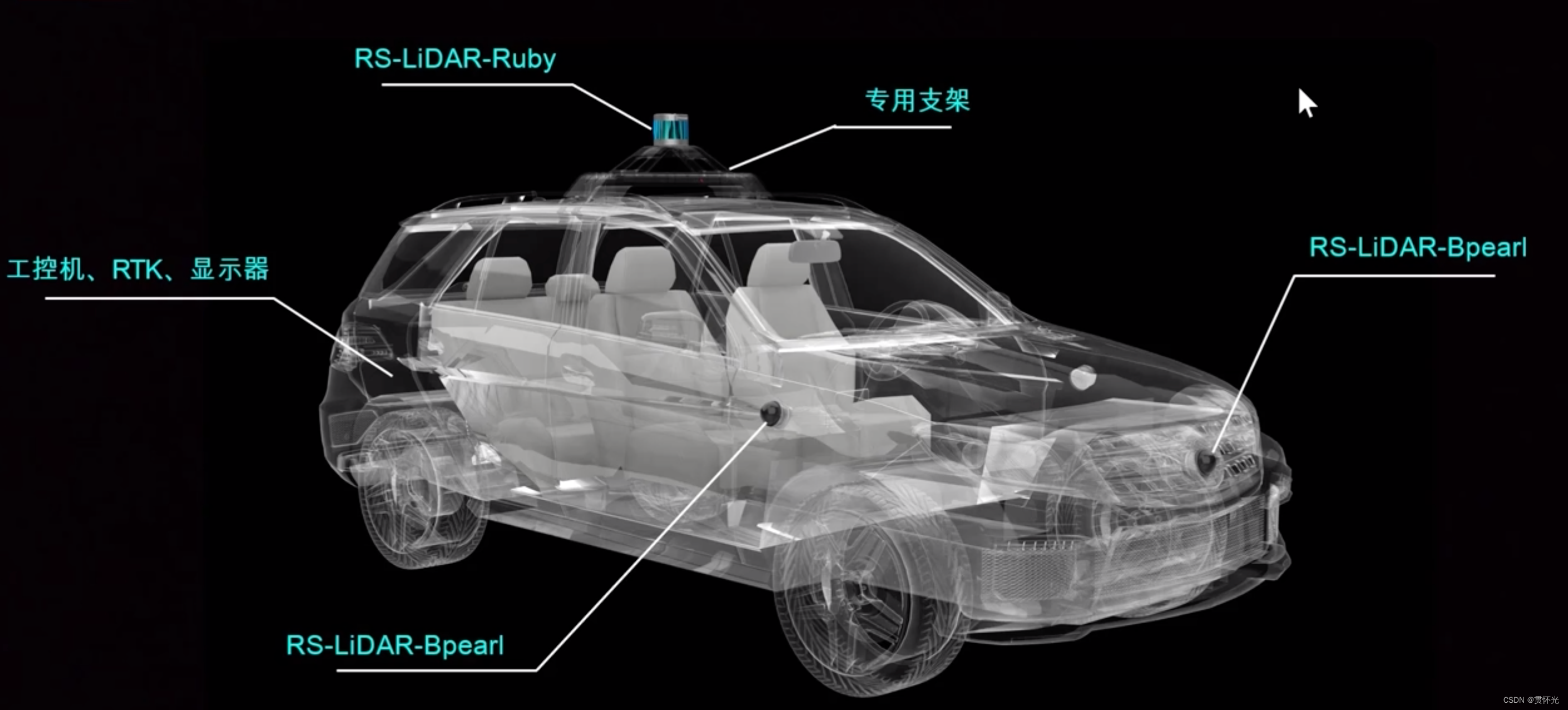
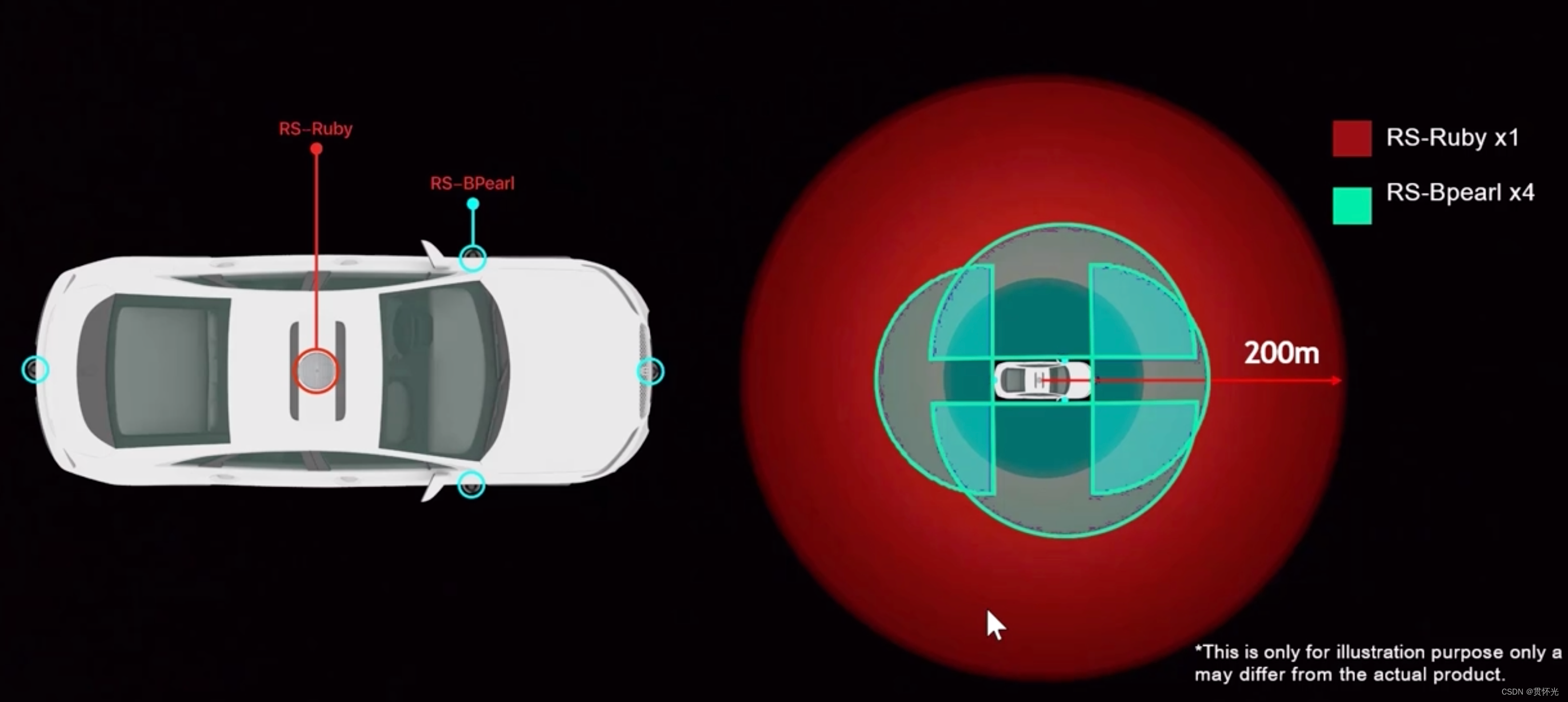
其感知RUby范围是200m,通过四个Bpeal雷达,对于车道线,行人可以更好的进行检测是否存在,主视雷达的感知范围是上15度下25度
这种范围内的很明显的感受到激光雷达发展迅速。超过200米的感知范围,得到的点云是非常稠密的。
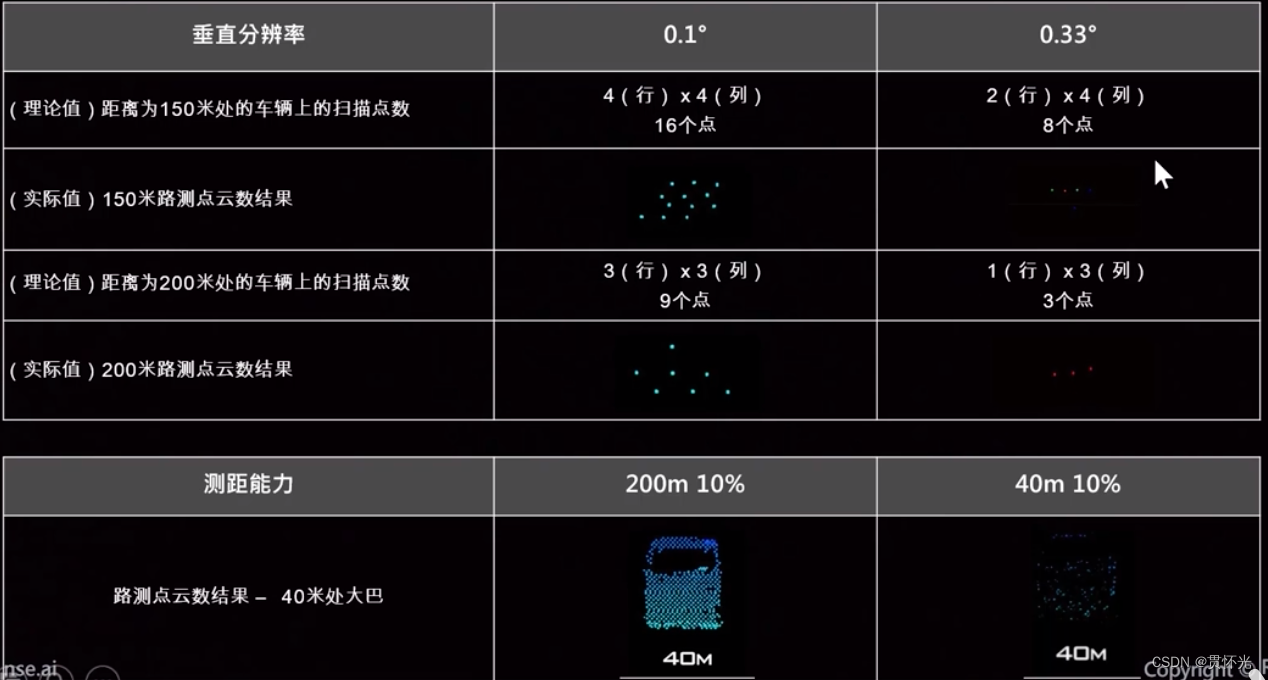
趋于像素级的垂直分辨率:0.1
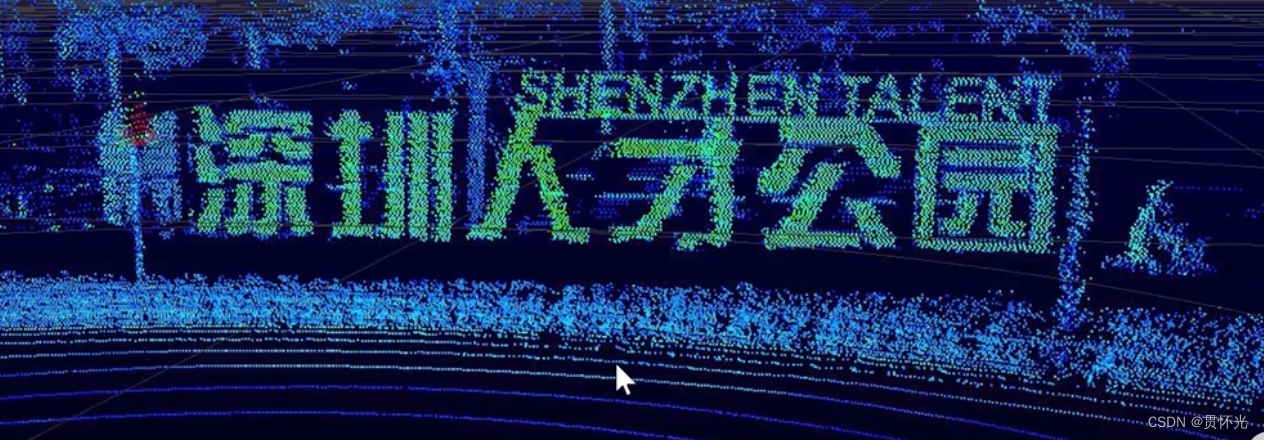 趋于像素级的垂值分辨率:0.1°
趋于像素级的垂值分辨率:0.1°
得益于独特的光学设计,Ruby 的垂值分辨率突破极限,实现 100 多个激光通道在 0.1°垂直间距下,不串扰、不失真。我们独特的技术处理,使得 Ruby 激光光斑的发散角足够小,保证在 200 远处两个相邻光斑能量集中区域合理分配,准确检测障碍物。

人在激光里面是非常难检测的,比如在商用的领域非常依赖于传统的方案。肯定使用几个人来检测。
赋予识别“材料和颜色”能力的反射强度信息
目前研究激光雷达:抗多雷达对射干扰+抗强光干扰。激光雷达厂商也在考虑激光雷达相互干扰的问题,激光相互干扰的性能比较差
另外一点,以后的自动驾驶每个车都顶着一个激光雷达,如何保证激光雷达相互干扰的问题。在图像里面有对抗生成,存在欺骗的因素。也有一些激光里面有一些对抗生成工作。(如何欺骗激光雷达,是需要一些数据的)
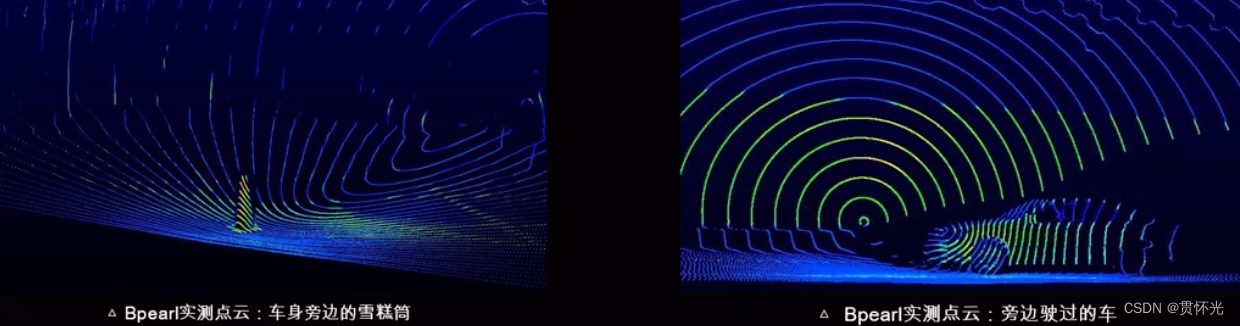
近距离补盲激光雷达RS-Bpearl

近距离补盲线束不是很多,可以做一些很密集的周围的检测,比较明显可以检测周围的障碍物。这种情况下如何做检测,点云的组织方式改变了。很大情况依赖于点云技术的滤波和拟合,通过这些:我们可以采取更好的感知。
行人来检测,人可以非常自由的。
硬件部分
多传感器最先发展的是**高精地图:**高精地图往往被认为是自动驾驶的基建。只有建立了高精地图才能进行车道型规划。并且通过高精地图进行辅助定位,并且判断哪里有交通灯。
**数字孪生:**平行驾驶也是
在车辆控制中主要依赖于编码器,IMU(加速度计和陀螺仪),自动驾驶场景RPY,航向角是很难推算的。GPS有很多RTK技术可以获得更好的定位效果。
多个传感器之间就要考虑传感器标定
-
时间同步,保证多个雷达的时间处于同一个时间计时标准(不进行时间同步时,每个雷达以启动时刻计时,使用自身内部独立的计时系统)
-
外部时间源:GPS 或网络时间源
-
时间输入:
GPS 通过 UART 串口接入雷达,发送 GPRMC 消息;PPS( 秒脉冲)通过 IO 接入雷达,发送 1PPS 脉冲信号网络时间通过以太网 UDP
指令发送时间,进行同步
-
空间同步,保证所有的雷达数据转换到一个统一的坐标系下(不同雷达扫描到的同一个目标具有同样的坐标位置)
-
统一坐标系:选择位置最核心的一个雷达的坐标系作为雷达耦合的统一坐标系理论上可以选择任意坐标系作为统一坐标系)
地图坐标系、相机坐标系
- 空间位置标定
平移量- (x, y, z)
旋转量- (rol, pitch, yaw)
(平移量可以通过测量安装距离来标定初值,且有些安装方式是无法直接测距的,但是旋转量无法测量)
通过标定版,进行相机边缘进行标定。
软件部分
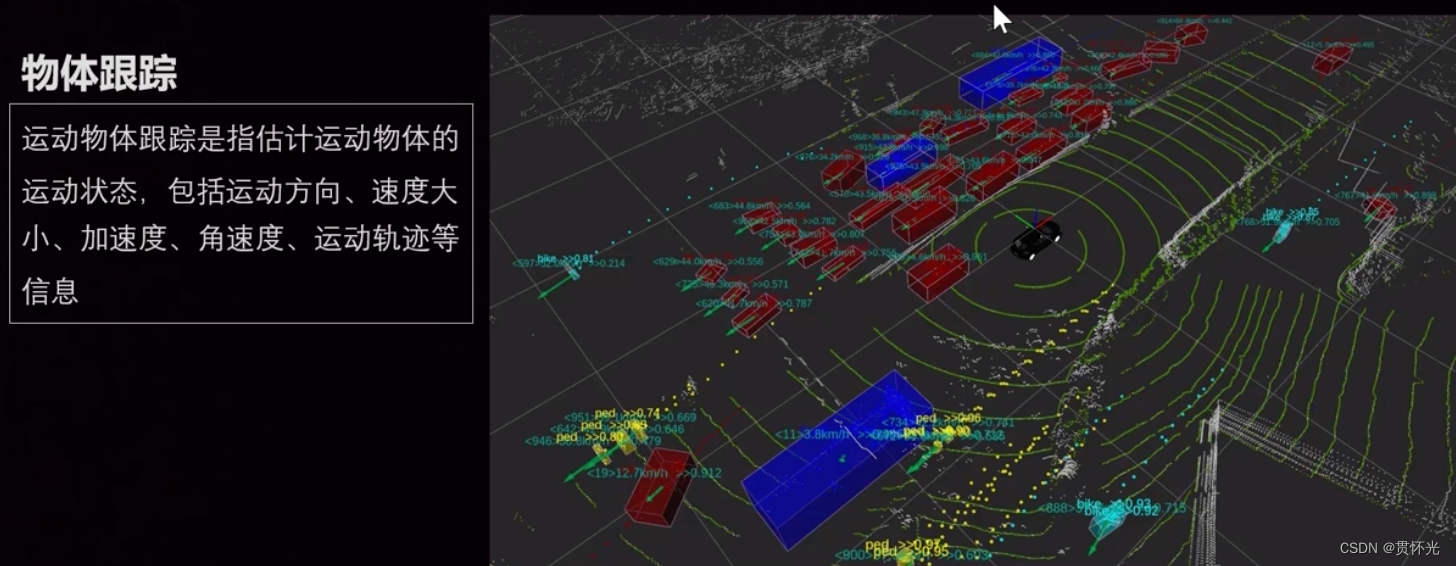
障碍物检测
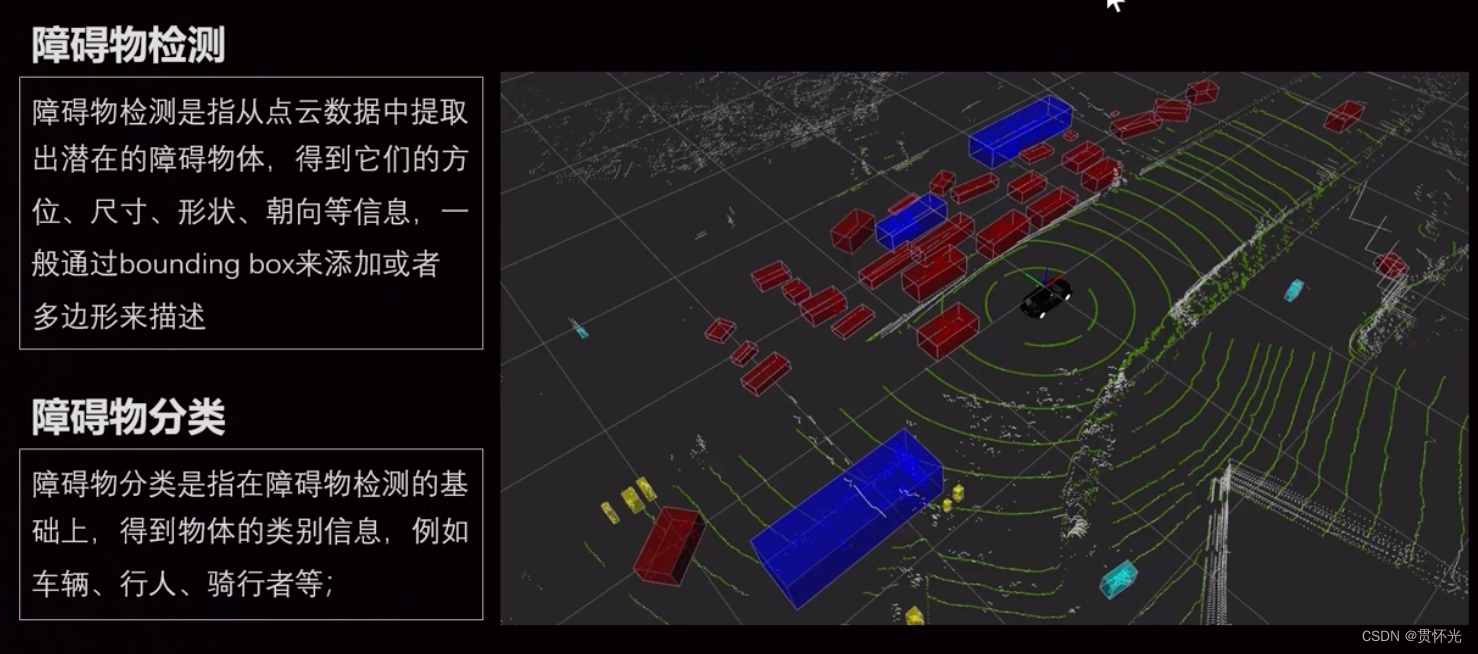
三维检测的任务,往往是多任务的检测,比如车辆的朝向、车辆的分类、车辆的运动来测量速度。聚类算法:来进行测绘、拟合高维平面的信息。
对于自动驾驶来讲,融合才是重要的。有些就依赖于自身的状态的因素
可以进行估计平面估计,通过法向量的计算来很好的判断那个
比视觉相比是更容易的,SLAM感知范围怎么融合得到更有修的的结果
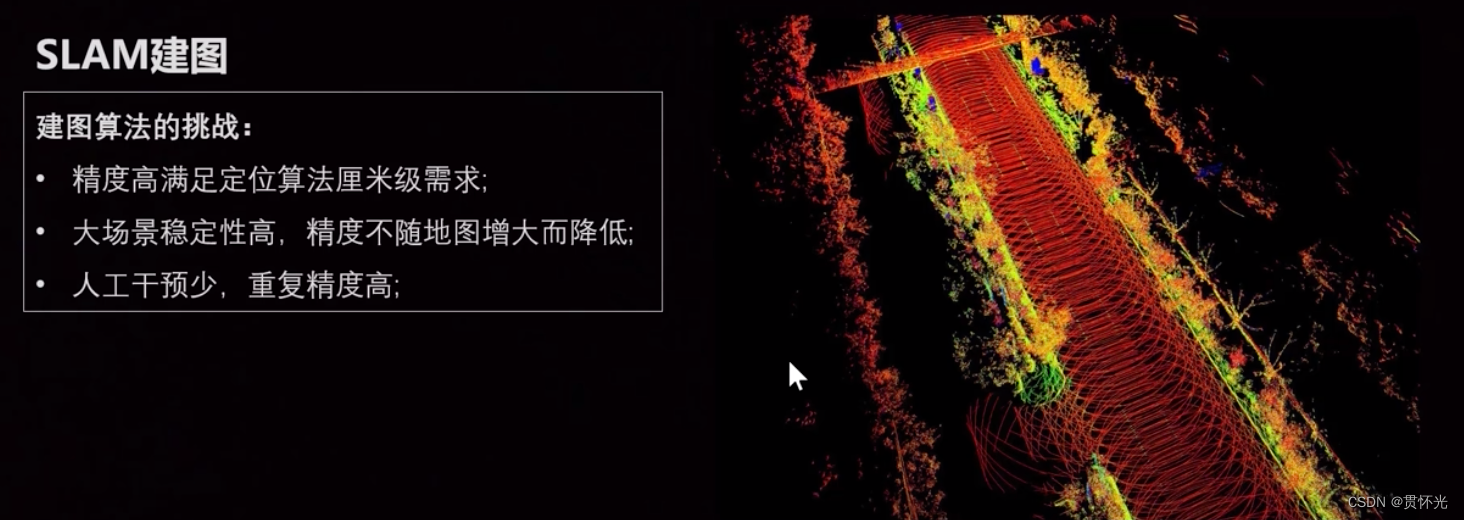
建图算法方案
-
采用图优化结合闭环检测,相比传统粒子滤波方法在大场景下仍能保证精度
结合雷达、里程计、IMU 和 GPS 实现多传感器融合,增加冗余度,保证复杂场景下的可靠度:
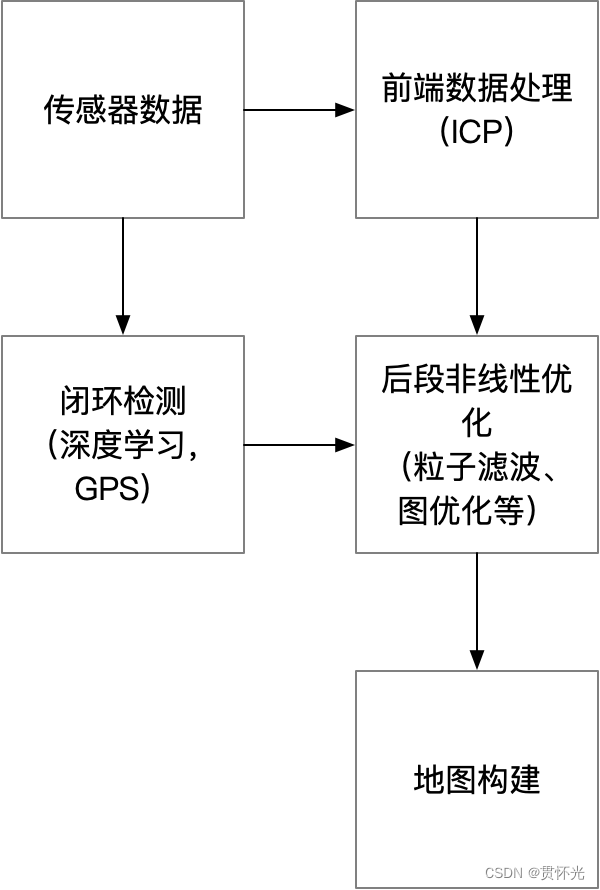
通过ICP完成可以做统一优化,也可以经过机器人运动。来去得其效果,如取关键点,可以计算特征算子。
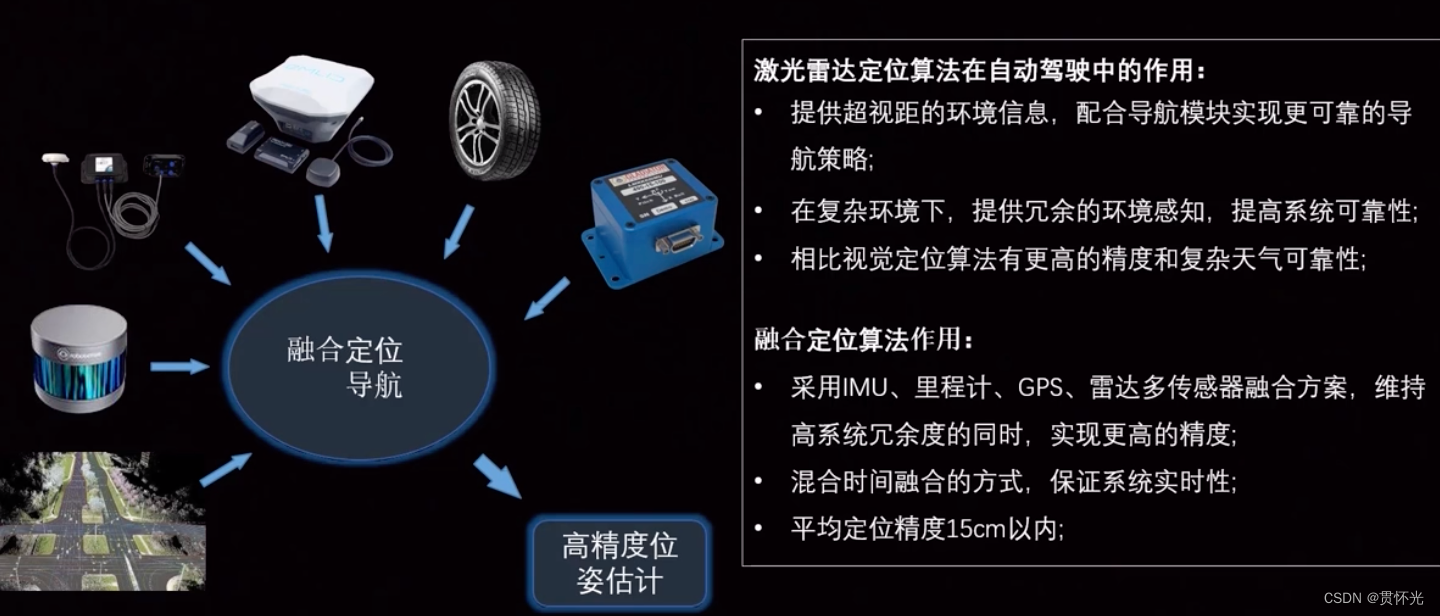
定位
重定位
- 定位场景展示:小型移动机器人。特点:经常发生、灵活机动、角速度较大、视角比较低
- 定位场景展示:开放城市道路。特点:速度较快、会出现被大车包围的情况
自动驾驶里数据是非常重要的:
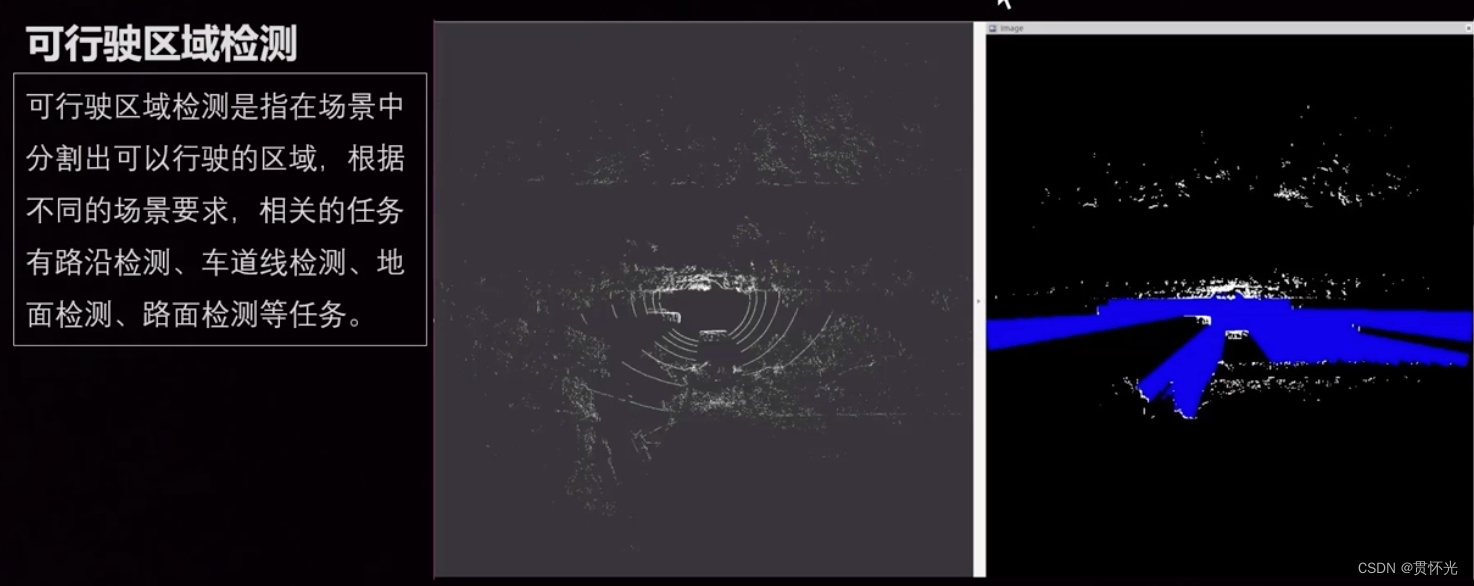
- 数据预处理 聚类算法:地面估计(计算法向量,拟合平面)空间聚类,来区分场景和建筑物。
- 检测:基于几何鲜艳的,朝向和尺寸结合历史信息。通过前后的约束。
- 建立局部地图,做匹配。做更加完整
SLAM
通过提取一些特征点,通过ICP进行一些匹配,比较鲁邦,通过后端优化方式
通过外点的形式,将障碍物进行过滤。
在深度学习领域检测方案
语义分割等