一、概述
1、机器人控制的目的
对自由运动机器人来说,控制的目的是要控制机器人手端的位置和姿态(以后统一简称为位姿),即所谓位置控制问题。这时希望机器人手端所达到的位置称为期望位置或期望轨迹。期望轨迹可以在机器人任务空间中给出,也可以通过逆运动学关系转化为机器人关节空间中的期望轨迹。期望轨迹通常有两种形式:一种是一个固定位置(即固定点),另一种是一条随时间连续变化的轨迹。自由运动机器人位置控制的目的,是要使机器人手端从任意起始位置出发都能到达期望轨迹。当期望轨迹是固定点时的位置控制称为定点控制问题。从控制的角度看,这属于整定问题。当期望轨迹是随时间连续变化轨迹时的控制问题称为轨迹跟踪问题,这属于控制理论中的跟踪问题。
对于运动受限机器人来说,其控制问题要复杂的多。由于机器人与环境接触,这时不仅要控制机器人手端位置,还要控制手端作用于环境的力。也就是说,不仅要使机器人手端位置达到期望值,还要使其作用于环境的力达到期望值。更广泛意义下的运动受限机器人还应包括多机器人协同工作的情况。这时的控制还应包括各机器人间的协调,负荷的分配以及所共同夹持的负载所受内力的控制等等复杂问题。
2、机器人控制所采用的基本方法
对于自由运动机器人来说,其控制器设计可以按是否考虑机器人的动力学特性而分为两类。
一类是完全不考虑机器人的动力学特性,只是按照机器人的实际轨迹于期望轨迹间的偏差进行负反馈控制,这类方法通常被称为“运动控制(Kinematic Control)”,其基本的控制结构框图如下图所示,其中的控制器常采用PD或PID控制。
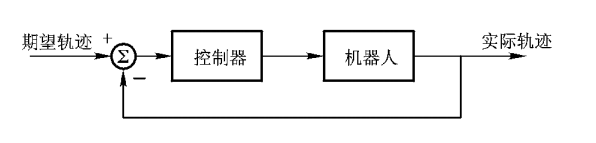
运动控制的主要优点是控制律简单,易于实现。但对于控制高速高精度机器人来说,这类方法有两个明显的缺点:一是难于保证受控机器人具有良好的动态和静态品质;二是需要较大的控制能量。
另一类控制器设计方法通常被称为“动态控制(Dynamic Control)”。这类方法是根据机器人动力学模型的性质设计出更精细的非线性控制律,所以又常称为“以模型为基础的控制(Model-based Control)”。用冬天控制方法设计的控制器可使被控机器人具有良好的动态和静态品质,克服了运动控制方法的缺点。然而由于各种动态控制方案中都无一例外地需要实时进行某些机器人动力学计算,而机器人又是一个复杂的多变量强耦合的非线性系统,这就需要较大的在线计算量,给实时控制带来困难。
机器人动态控制方案常常采用如下图所示的基本结构,可以看出它与运动控制方法在结构上的差别是引入了一个内控制回路,其作用是根据机器人动力学特性进行动态补偿,使得经内控制回路作用后的机器人变为一个更易于控制的系统(例如化为一个解耦的线性定常系统等)。内控制回路补偿器的设计通常是采用各种动力学补偿和反馈线性化等方法,外控制回路的设计可采用PD(或PID)控制,自适应控制、变结构控制及各种鲁棒控制设计方法等。
