目录
动态规划怎么学?
学习一个算法没有捷径,更何况是学习动态规划,
跟我一起刷动态规划算法题,一起学会动态规划!
1. 题目解析
题目链接:63. 不同路径 II - 力扣(Leetcode)
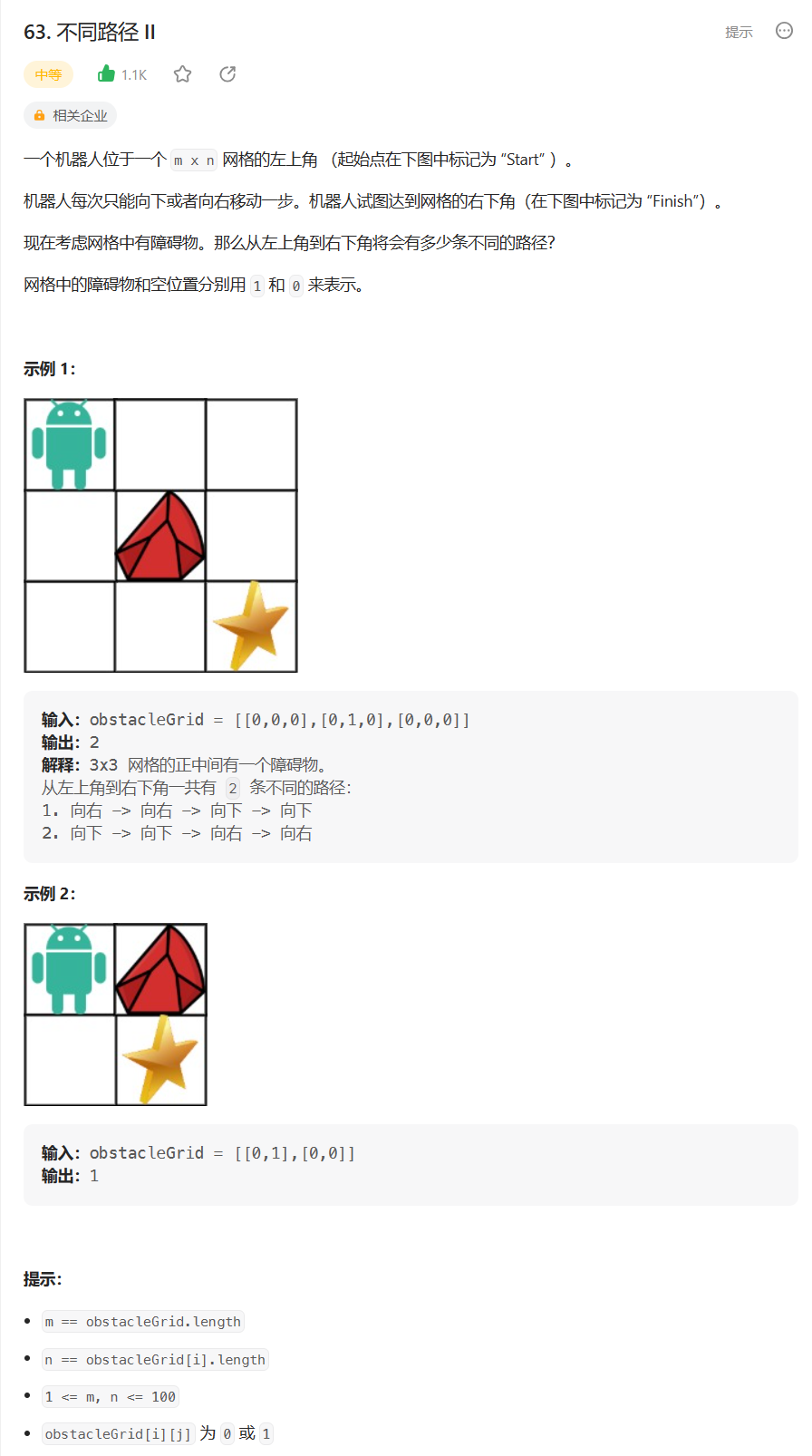
这道题目也不难理解,相比之前的不同路径,
这道题添加了障碍物,题目给了我们一个二维的矩阵,
通过示例我们可以得知:
没有障碍物的位置就是初始化成0,有障碍物的位置就是1
而有障碍物的位置不能走,然后还是求路径数量。
2. 算法原理
1. 状态表示
dp[ i ][ j ] 就表示到[ i,j ]的时候,一共有多少种方法。
2. 状态转移方程
如果是没有障碍物的,我们就让:
dp[ i ][ j ] = dp[ i - 1 ][ j ] + dp[ i ][ j - 1 ]
如果有障碍,就让dp[ i ][ j ] = 0 表示这种路径不存在。
3. 初始化
我们多加一行和一列的虚拟节点,防止出现越界的情况,
把它们初始化成0,但是要保证第一个节点初始化成1.
4. 填表顺序
从左往右,从上往下。
5. 返回值
dp[ m ][ n ] ,终点作为返回值。
3. 代码编写
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
int m = obstacleGrid.size(), n = obstacleGrid[0].size();
vector<vector<int>> dp(m + 1, vector<int>(n + 1));
dp[0][1] = 1;
for(int i = 1; i <= m; i++) {
for(int j = 1; j <= n; j++) {
if(obstacleGrid[i - 1][j - 1] == 1) continue;
else dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m][n];
}
};写在最后:
以上就是本篇文章的内容了,感谢你的阅读。
如果感到有所收获的话可以给博主点一个赞哦。
如果文章内容有遗漏或者错误的地方欢迎私信博主或者在评论区指出~