MIT 18.06 linear algebra 第三十四讲笔记
第三十四课课程要点:
- 4 subspaces
- left-inverse
- right-inverse
- pseudo-inverse
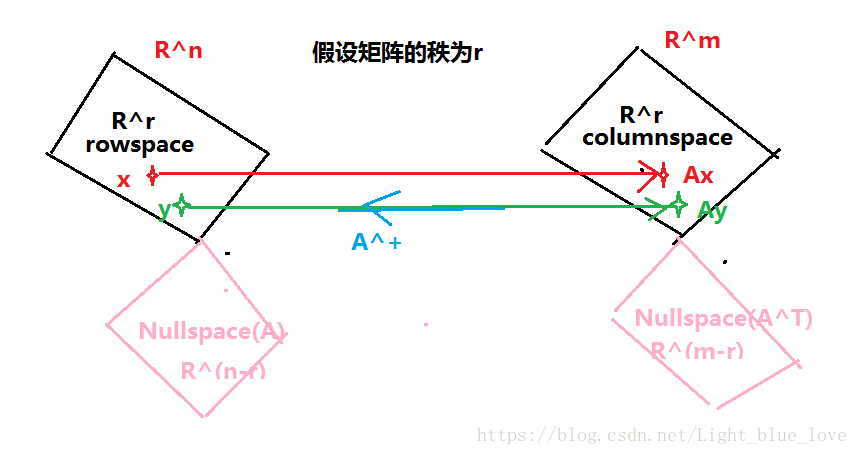
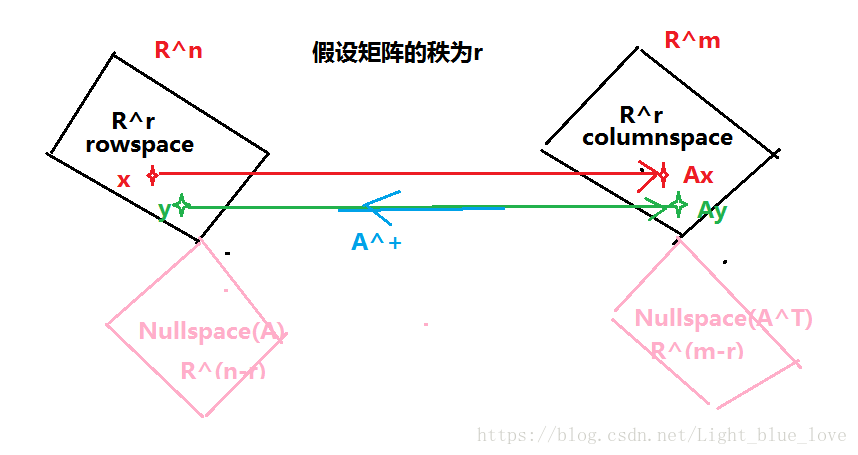
这张图是最前面学到的关于矩阵四个子空间。
有 的矩阵 ,如果矩阵 的左右逆都存在即 ,那么这个矩阵满足 ,即为满秩方阵。
左逆-列满秩
如果矩阵 是列满秩,即 ,矩阵各个列向量是线性独立的,那么矩阵的 。这时矩阵只存在左逆。对于 那么它的解只有一个或者无解。因为如果 在矩阵 的列空间中的话(即 在 中),那么既可以得到一个唯一解,如果向量 不在矩阵 的列空间中,则无解。
如果矩阵 的各个列是线性无关的,不论矩阵的形状如何。 都是对称且可逆的矩阵。
,左侧红色的部分就被称为矩阵 的左逆,即 。看到 ,是不是似曾相识,它就是前面学到的投影矩阵,这个是在列空间上的投影。
右逆-行满秩
假设矩阵 为行满秩矩阵,即 且 。在求解 时,由于 是行满秩,所以说在消元的时候不会出现全零的行,不会导致消到最后出现 的情形。 有 个自由变量,即 有无穷多个解。由于矩阵 是行满秩的,那么 是可逆的。
,红色的部分就是矩阵 的右逆。即 。 也是一个投影矩阵,它是在行空间上的投影矩阵。
- 当矩阵 两边都存在逆时,两个零空间即 均为0向量。
- 当矩阵 只存在左逆时, 。
- 当矩阵 只存在右逆时, 。
- 当矩阵 左右逆均不存在时, 都是存在的,不只有零向量。这是 。
伪逆
从上图中,在行空间中有两个向量 和 , 和 一定是在矩阵 的列空间中,那么这个矩阵 有点类似于行空间到列空间的一个映射。即行空间与列空间是一一对应的。如果向量 在矩阵 的零空间中,那么 ,所以在整个 中的所有向量均可以由行空间中的向量和零空间中的向量表示。由于零空间的存在它会把这些向量变为零向量。这样所有 中所有向量便都被包含了。
所有空间中的向量都能由行空间中的分量和零空间中的分量组成,变换会将零空间中的分量消掉。
证明:矩阵
行空间中的向量
,如果
,那么
.
矩阵
为行空间到列空间的一个映射,如果我们就限制在这两个空间上,那么矩阵
就是可逆的,因为
,从行空间到了列空间,也可以由办法找到从列空间到行空间的映射。即
。伪逆
的作用就是把
变没。
现在假设 ,那么 ,其中 属于 。前假设向量 都在行空间中,那么 必然也在行空间中。因此出现矛盾,得出 。
怎么样得出伪逆
前面我们学到分解一个矩阵可以通过SVD方法来
。
其中对角阵 。
那么这个矩阵的伪逆 。
这是在列空间上的投影矩阵。
这是在行空间上的投影矩阵。
矩阵可能没有左逆或者右逆,但是它一定存在伪逆。