要点:
三 YOLO v3

3.1 Darknet-53 (backbone)

3.2 目标边界框的预测
将预测的边界框中心限制在当前cell中, s(x) = Sigmoid(x) 。

3.3 正负样本的匹配

3.4 损失的计算

3.4.1 置信度损失 (Binary Cross Entropy)

扫描二维码关注公众号,回复:
15167625 查看本文章

其中 表示预测目标边界框与真实目标边界框的IOU c为预测值,
为c通过Sigmoid函数得到的预测置信度, N为正负样本个数.
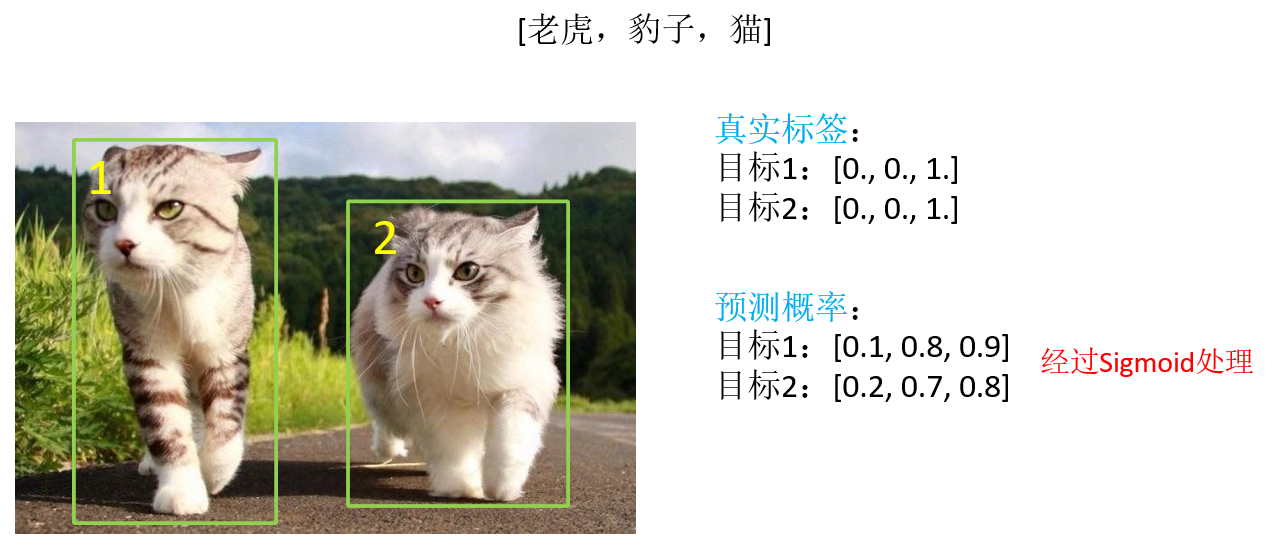
3.4.2 类别损失 (Binary Cross Entropy)


3.4.3 类别损失
3.4.4 定位损失


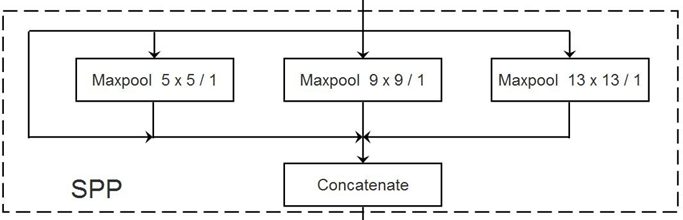
3.5 YOLOv3 SPP

3.5.1 Mosaic图像增强

3.5.2 SPP模块
实现了不同尺度的特征融合。
注意:这里的SPP和SPPnet中的SPP结构不一样,Spatial Pyramid Pooling