本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

4.2.3 话题通信小练习之李三白嫖
你好,我是小鱼。恭喜你完成了ROS2中非常重要的话题通信部分的学习,本节我们将一起做一个小练习,巩固一下我们的学习成果。
1.小练习背景
话说李四有个兄弟叫李三,他是李四的哥哥,一个典型的白嫖党。他看李四写的艳娘传奇非常的有意思,自己也想拿来品鉴一下。但他又不想给李四钱。
所以我们的任务就是,在李家村里创建白嫖党李三这个节点,然后为其订阅sexy_girl话题数据。
2.小练习思路
你可以将其分为下面几步:
- 新建li3.py这个文件,在里面创建一个BaiPiaoNode类并定义一个main()函数
- 编写BaiPiaoNode类,为其订阅话题和编写回调函数
- 在setup.py中配置li3节点,如果记不得如何配置可以看看3.5章节
- 编译运行李三节点,并启动李四和王二节点
- 观察运行结果,用rqt_graph查看计算图
3.小练习答案(写完再参考哦)
3.1代码
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class BaiPiaoNode(Node):
"""
创建一个李三节点,并在初始化时输出一个话
"""
def __init__(self,name):
super().__init__(name)
self.get_logger().info("大家好,我是李三,李四他哥,我可以白嫖李四的小说!")
self.sub_ = self.create_subscription(String,"sexy_girl",self.recv_callback,10)
def recv_callback(self,novel):
self.get_logger().info('李三:我已经收到了:%s' % novel.data)
def main(args=None):
"""
ros2运行该节点的入口函数,可配置函数名称
"""
rclpy.init(args=args) # 初始化rclpy
node = BaiPiaoNode("li3") # 新建一个节点
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # rcl关闭
3.2setup.py配置
entry_points={
'console_scripts': [
"li4_node = village_li.li4:main",
"li3_node = village_li.li3:main"
],
}
3.3 计算图
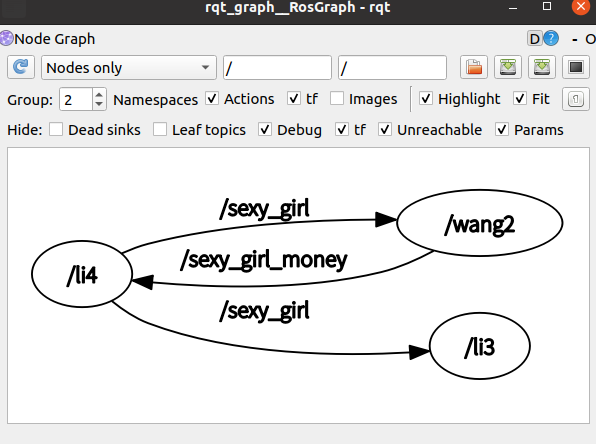
从图中可以看到,li3并没有给li4钱。
作者介绍:
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小智,一起交流技术,学习机器人