本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

5.1ROS2参数介绍
1.参数背景
大家好,我是爱吃瓜皮的小鱼。前面章节中,我们动手创建了ROS2镇子和几个村庄。其中作家李四一名灵魂写手,《艳娘传奇》更新速度牵着着很多村民的心。
李四写小说的速度是在我们创建李四的时候,所使用的timer周期决定的,不知道你还记不记得下面这一段代码:
timer_period = 5 #李四的手速,每5s写一段话,够不够快
self.timer = self.create_timer(timer_period, self.timer_callback) #启动一个定时装置,每 5 s,调用一次time_callback函数
这里我们用了一个time_period来控制timer执行回调函数的速度,但是当我们写好速度运行李四节点后,我们就没有办法改变回调函数的周期,控制李四写小说的速度了。
我们可以把写小说的速度当作李四这个节点的一个设置,就像亮度值是显示器的一个设置一样。既然在显示器运行时可以修改显示器的亮度,那可以在李四运行时改变这个周期值设置呢?
小思考:在一个机器人上的节点会有哪些设置?
根据需求,ROS2为我们准好了一整套的解决方案机制。
2.解决问题-参数
ROS2官方对参数的定义是:
A parameter is a configuration value of a node. You can think of parameters as node settings.
有请翻译官小鱼
参数是节点的一个配置值,你可以任务参数是一个节点的设置
感谢小鱼同学的精彩翻译,ROS2的参数就是节点的设置,和我们上面提出的需求不谋而合,有了参数我们就可以实现动态的改变李四写小说的速度了
3.论参数组成成分
ROS2参数是由键值对组成的,此话怎讲?键值对指的是就是名字和数值,比方说
- 名字:李四写小说周期,值:5s
- 名字:显示器亮度,值:60%
名字的数据类型小鱼不多说肯定是字符串了,值的数据类型呢?我们这里用到的是5是整形数据,显然只有一个整形是不够用的,ROS2支持的参数值的类型如下:
- bool 和bool[],布尔类型用来表示开关,比如我们可以控制雷达控制节点,开始扫描和停止扫描。
- int64 和int64[],整形表示一个数字,含义可以自己来定义,这里我们可以用来表示李四节点写小说的周期值
- float64 和float64[],浮点型,可以表示小数类型的参数值
- string 和string[],字符串,可以用来表示雷达控制节点中真实雷达的ip地址
- byte[],字节数组,这个可以用来表示图片,点云数据等信息
4.体验参数
我们使用乌龟模拟器来体验一下参数,同时讲解一下常用的参数的命令行工具。
4.1 运行小乌龟模拟器节点和小乌龟控制节点
打开终端
ros2 run turtlesim turtlesim_node
再打开一个终端
ros2 run turtlesim turtle_teleop_key
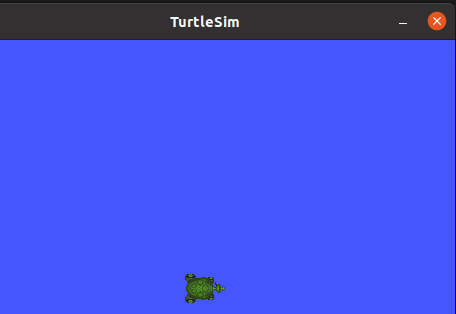
可以看到下面的蓝蓝的模拟器
4.2 查看节点有哪些参数(设置)
我们可以使用下面的指令来查看所有节点的参数列表,打开一个终端,运行下面的指令
ros2 param list
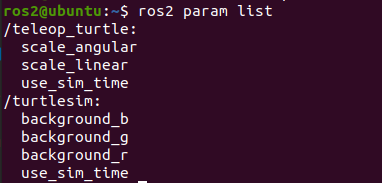
写代码为什么要做到见名知意?我们看到乌龟模拟器的四个参数,background背景bgr指的是blue、green、red。简而言之就是背景颜色。那这几个参数应该可以控制乌龟模拟器的背景颜色。
最后一个use_sim_time是每个节点都带的,后面小鱼写篇文章稍微讲讲。
如果看不懂,还可以有一个方法详细查看一个参数的信息。
ros2 param describe <node_name> <param_name>
比如:
ros2 param describe /turtlesim background_b
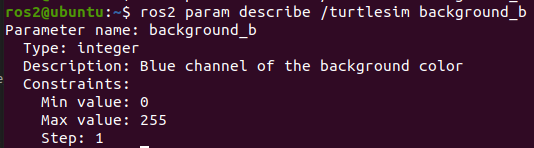
这里就可以详细的看到参数的名字,参数的描述,参数的类型,还有对参数的约束,最大值最小值等。
4.3 查看参数值
参数的组成由名字和值(键值组成),名字可以通过param list获取,值该使用指令获取呢?
下面这个命令行工具可以帮助我们获取参数的值
ros2 param get /turtlesim background_b
运行一下,你会发现结果是255,蓝色进度条打满,再看看r红色和g绿色。
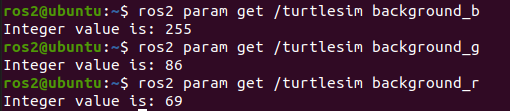
分别是255,86,69
4.4 设置参数
找到了参数和值,接着我们来改变一下乌龟模拟器的颜色。
打开小鱼精心准备的在线工具:https://fishros.com/tools/pickr
选取一个自己喜欢的颜色,这里小鱼就选绿色,因为乌龟模拟器换成绿色的应该很奇怪。
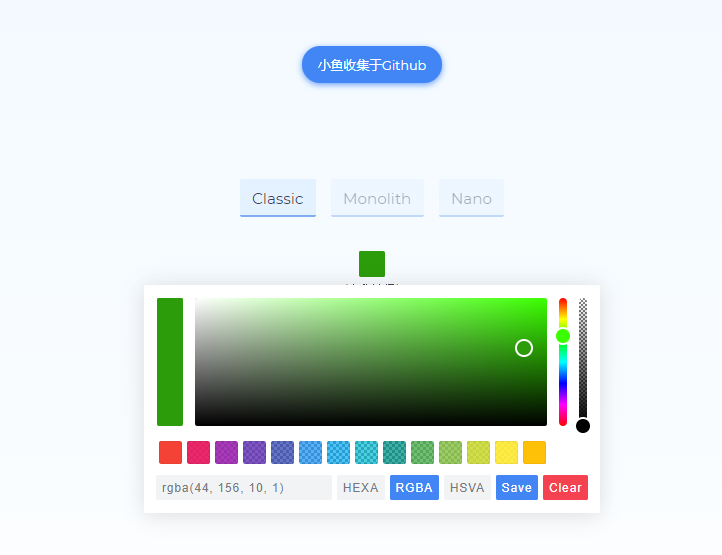
可以看到当前的这个颜色,r为44,g为156,b为10,接着我们可以使用下面的指令来设置参数的值。
ros2 param set <node_name> <parameter_name> <value>
我们依次修改参数值:
ros2 param set /turtlesim background_r 44
ros2 param set /turtlesim background_g 156
ros2 param set /turtlesim background_b 10
接着你可以看到这样的颜色的乌龟模拟器(绿的令人发慌)
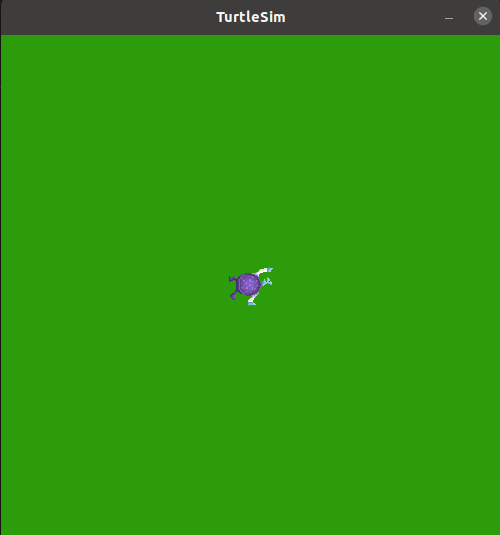
需要留意的是,我们修改的背景数据并没有被存储,只是临时修改。重新启动节点乌龟模拟器依然还是原来的蓝色,不是我们想要的绿色的。
4.5 把参数存起来
把参数存起来其实就相当去把当前的参数值拍一张快照,然后保存下来,后面可以用于恢复参数到当前的数值。
可以使用下面的命令进行操作:
ros2 param dump <node_name>
4.5.1 给乌龟模拟器参数拍照
比如我们要保存乌龟模拟器的节点数据,可以采用下面的指令;
os2 param dump /turtlesim

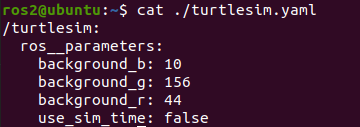
文件被保存成了yaml格式,用cat指令看一看
cat ./turtlesim.yaml
4.5.2 恢复参数值
我们Ctrl+C关闭乌龟模拟器,然后再重新运行。
ros2 run turtlesim turtlesim_node
可以看到模拟器又变成了蓝色了,接着通过param的load的方法把参数值恢复成我们之前存储的。
ros2 param load /turtlesim ./turtlesim.yaml

几乎是瞬间,乌龟模拟器又被我们搞绿了
4.5.3 启动节点时加载参数快照
有什么办法一开始就让乌龟模拟器变成绿色?答案有的。
ros2 的run 指令支持下面这种骚操作。
ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>
关闭我们的乌龟模拟器,使用下面的指令重新运行
ros2 run turtlesim turtlesim_node --ros-args --params-file ./turtlesim.yaml
可以看到一上来就时绿了的模拟器。
5.总结
本节小鱼带大家一起学习了参数的基本概念,同时动手把参数的命令行工具玩了一遍。下面的章节中,小鱼将大家一起给李四和王二设置参数,解决动态改变李四写书周期速度的问题。
作者介绍:
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小智,一起交流技术,学习机器人