本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

4.3 ROS2接口介绍
本节小鱼将会带你认识一个新的概念,叫做interface,即接口。
1.什么是接口
接口其实是一种规范
你还记得前面几节的示例中,李四和王二分别使用了下面两种数据类型来传递小说和钱,这两种数据类型分别代表字符串和32位二进制的整型数据。
std_msgs/msg/String
std_msgs/msg/UInt32
李四所在的李家村是ament_python编译类型,使用的是Python语言,而王二所在的村庄的编译类型是ament_cmake,使用的是C++语言。不同语言对字符串的定义是不同的,而通过接口可以抹平这种语言差异。
使用接口对做机器人有什么好处呢?
小鱼举一个雷达的例子,不同的厂家生产出不同的类型的激光雷达,每种雷达驱动方式、扫描速率等等都不相同。
当机器人进行导航时,需要激光雷达的扫描数据,假如没有统一接口,每次更换一个种类的雷达,都需要重新做程序适配。
于是ROS2中定义了一个统一的接口叫做sensor_msgs/msg/LaserScan,现在几乎每个雷达的厂家都会编写程序将自己雷达的数据变成sensor_msgs/msg/LaserScan格式,提供给用户使用。
如果雷达的例子不好理解,大家可以把雷达换成手机充电器,USB接口是不是也是一种规范,所有的厂家都按照这种接口进行充电器和连接线的生产。
2. ROS2接口介绍
我们继续回到之前的例子上来,李四和王二传递小说和钱的时候,我们并没有定义接口,他们直接使用了std_msgs中的String和UInt32。
std_msgs功能包是我们安装ROS2的时候ROS2为我们自动安装的一个功能包,除了std_msgs之外,ROS2还定义了很多做机器人常用的接口。
使用
ros2 interface package sensor_msgs命令可以查看某一个接口包下所有的接口
比如:传感器类的消息包sensor_msgs
打开终端输入:ros2 interface package sensor_msgs
sensor_msgs/msg/JointState #机器人关节数据
sensor_msgs/msg/Temperature #温度数据
sensor_msgs/msg/JoyFeedbackArray
sensor_msgs/msg/Joy
sensor_msgs/msg/PointCloud2 #点云
sensor_msgs/msg/MultiEchoLaserScan
sensor_msgs/msg/NavSatStatus
sensor_msgs/msg/CameraInfo #相机信息
sensor_msgs/msg/Illuminance
sensor_msgs/msg/MagneticField
sensor_msgs/srv/SetCameraInfo
sensor_msgs/msg/LaserEcho
sensor_msgs/msg/RegionOfInterest
sensor_msgs/msg/PointCloud #点云
sensor_msgs/msg/Range #范围
sensor_msgs/msg/RelativeHumidity
sensor_msgs/msg/FluidPressure
sensor_msgs/msg/BatteryState
sensor_msgs/msg/Imu #加速度传感器
sensor_msgs/msg/Image #图像
sensor_msgs/msg/PointField
sensor_msgs/msg/JoyFeedback
sensor_msgs/msg/LaserScan #雷达数据
sensor_msgs/msg/MultiDOFJointState #多自由度关节数据
sensor_msgs/msg/TimeReference
sensor_msgs/msg/CompressedImage #压缩图像
sensor_msgs/msg/NavSatFix
sensor_msgs/msg/ChannelFloat32
虽然ROS2为我们定义了大量拿来就用的接口,但有时候还是不能满足我们的变态想法,比如:李四想给自己的小说每章开头加一张插图,该怎么办?
办法就是自定义接口。
3.ROS2自定义接口
在3.1章节中,小鱼提到过,ROS2提供了四种通信方式:
- 话题-Topics
- 服务-Services
- 动作-Action
- 参数-Parameters
除了参数之外,话题、服务和动作(Action)都支持自定义接口,每一种通信方式所适用的场景各不相同,所定义的接口也被分为话题接口、服务接口、动作接口三种。
这三种接口定义起来有什么不一样的地方呢?小鱼先带大家直观感受一下:
话题接口格式:xxx.msg
int64 num
服务接口格式:xxx.srv
int64 a
int64 b
---
int64 sum
动作接口格式:xxx.action
int32 order
---
int32[] sequence
---
int32[] partial_sequence
有的同学可能会问这样一个问题,我们只是简单的写了一下变量类型和名称,我们在程序里面怎么调用呢?
其实这里有一个转换的过程:将msg、srv、action文件转换为Python和C++的头文件。
通过ROS2的IDL模块 产生了头文件,有了头文件,我们就可以在程序里导入并使用这个消息模块。
4.ROS2接口常用CLI命令
最后给大家讲一下ROS2接口相关的常用命令有哪些。
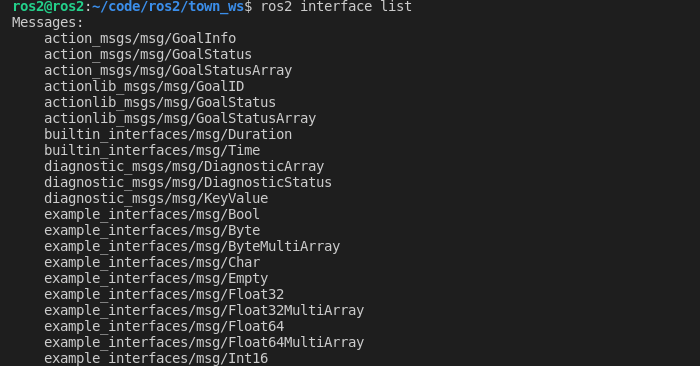
4.1查看接口列表(当前环境下)
ros2 interface list
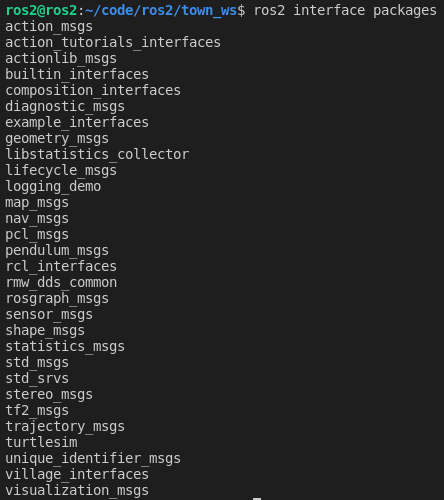
4.2查看所有接口包
ros2 interface packages
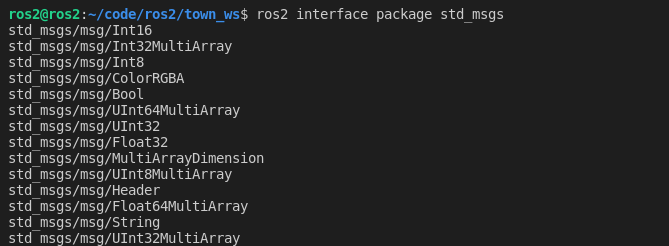
4.3查看某一个包下的所有接口
ros2 interface package std_msgs
4.4查看某一个接口详细的内容
ros2 interface show std_msgs/msg/String

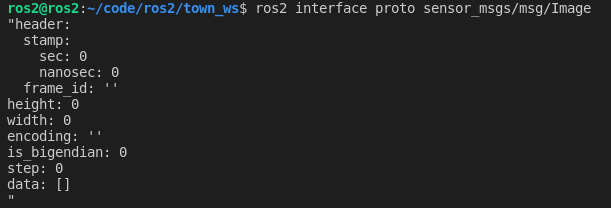
4.5 输出某一个接口所有属性
ros2 interface proto sensor_msgs/msg/Image
5.总结
了解了ROS2的接口,下一节我们就来自定义一个接口来试一试
作者介绍:
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小智,一起交流技术,学习机器人