本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

4.5.3 C++服务通信实现(张三买书)
看到张三买书就突然想起华强买瓜,但张三是真心买书不是存心找茬。开始编写代码之前,我们先梳理一下买书任务流程。
1.任务流程
一句话:张三拿多少钱钱给王二,王二凑够多少个章节的艳娘传奇给他
2.服务端(王二)实现
首先是作为二手书提供者的服务端王二节点代码的编写。
2.1 创建C++服务通信服务端的步骤
-
导入服务接口
-
创建服务端回调函数
-
声明并创建服务端
-
编写回调函数逻辑处理请求
2.2 添加服务接口与依赖
2.2.1 添加依赖
添加依赖是为了让程序能够在编译和运行时找到对应的接口
因为village_wang的包类型是ament_cmake,故需要进行以下两步操作:
第一步修改package.xml
加入下面的代码(告诉colcon,编译之前要确保有village_interfaces存在)
<depend>village_interfaces</depend>
第二步修改和CMakeLists.txt
在CMakeLists.txt中加入下面一行代码
find_package(village_interfaces REQUIRED)
find_package是cmake的语法,用于查找库。找到后,还需要将其和可执行文件链接起来
所以还需要修改ament_target_dependencies,在其中添加village_interfaces。
ament_target_dependencies(wang2_node
rclcpp
village_interfaces
)
2.2.2 添加服务接口
对于C++来说,添加服务接口只需在程序中引入对应的头文件即可。
这个头文件就是我们
SellNovel.srv生成的头文件
#include "village_interfaces/srv/sell_novel.hpp"
2.3 声明回调函数
2.3.1 声明回调函数
添加完服务接口接着就可以声明一个卖书请求回调函数。
// 声明一个回调函数,当收到买书请求时调用该函数,用于处理数据
void sell_book_callback(const village_interfaces::srv::SellNovel::Request::SharedPtr request,
const village_interfaces::srv::SellNovel::Response::SharedPtr response)
{
}
2.3.2 存书的队列(可以理解为书库)
再创建一个队列,用于存放自己看过的二手书,创建队列需要用到queue容器,所以我们先用#include <queue>在程序开头引入该容器,再在代码中添加下面这句话。
//创建一个小说章节队列
std::queue<std::string> novels_queue;
2.3.3 死锁
当张三请求王二买二手书的时候,假如王二手里书的数量不足,王二就等攒够了对应数量的书再返回给张三。
等待攒够章节的操作需要在卖书服务函数中阻塞当前线程,阻塞后王二就收不到李四写的小说了,这样一来就会造成一个很尴尬的情景:
在卖书服务回调函数中等着书库(队列)里小说章节数量满足张三需求,接收小说的程序等着这边的卖书回调函数结束,好把书放进书库(队列)里。
这种互相等待的情况,我们称之为死锁。那如何解决呢?
2.3.4 多线程
大家可能会问,为啥接收小说的程序不能自己单独干,非要等待服务回调函数结束才把书放到书库,不能收到书就把书直接放到书库吗?
原因是ROS2默认是单线程的,同时只有一个线程在跑,大家都是顺序执行,你干完我干,一条线下去。
所以为了解决这个问题,我们可以使用多线程,即每次收到服务请求后,单独开一个线程来处理,不影响其他部分。
2.3.5 回调函数组
ROS2中要使用多线程执行器和回调组来实现多线程,我们先在SingleDogNode中声明一个回调组成员变量。
// 声明一个服务回调组
rclcpp::CallbackGroup::SharedPtr callback_group_service_;
完成 声明之后,我们的SingleDogNode新增内容如下:
2.3.6 最终结果
class SingleDogNode : public rclcpp::Node
{
public:
// 构造函数
SingleDogNode(std::string name) : Node(name)
{
}
private:
// 声明一个服务回调组
rclcpp::CallbackGroup::SharedPtr callback_group_service_;
//创建一个小说章节队列
std::queue<std::string> novels_queue;
// 声明一个服务端
rclcpp::Service<village_interfaces::srv::SellNovel>::SharedPtr server_;
// 声明一个回调函数,当收到买书请求时调用该函数,用于处理数据
void sell_book_callback(const village_interfaces::srv::SellNovel::Request::SharedPtr request,
const village_interfaces::srv::SellNovel::Response::SharedPtr response)
{
//对请求数据进行处理
}
};
2.4 实例化服务端并编写回调函数处理请求
2.4.1 实例化回调组
在ROS2中,回调函数组也是一个对象,通过实例化create_callback_group类即可创建一个callback_group_service的对象。
在SingleDogNode的构造函数中添加下面这行代码,即可完成实例化
callback_group_service_ = this->create_callback_group(rclcpp::CallbackGroupType::MutuallyExclusive);
2.4.2 声明并实例化服务端
我们使用成员函数作为回调函数,这里要根据回调函数中参数个数,设置占位符,即告诉编译器,这个函数需要传入的参数个数。
在之前订阅话题的回调函数中,我们已经用到过一次了,因为话题回调只有一个参数,所以只需要一个占位符,这里服务的回调是两个参数,所以要设置两个
using std::placeholders::_1;
using std::placeholders::_2;
在private:下声明服务端
// 声明一个服务端
rclcpp::Service<village_interfaces::srv::SellNovel>::SharedPtr server_;
在构造函数中实例化服务端
// 实例化卖二手书的服务
server_ = this->create_service<village_interfaces::srv::SellNovel>("sell_novel",
std::bind(&SingleDogNode::sell_book_callback,this,_1,_2),
rmw_qos_profile_services_default,
callback_group_service_);
实例化服务端可以直接使用create_service函数,该函数是一个模版函数,需要输入要创建的服务类型,这里我们使用的是<village_interfaces::srv::SellNovel>,这个函数有四个参数需要输入,小鱼接下来进行一一介绍
"sell_novel"服务名称,没啥好说的,要唯一哦,因为服务只能有一个std::bind(&SingleDogNode::sell_book_callback,this,_1,_2)回调函数,这里指向了我们2.3.1中我们声明的sell_book_callbackrmw_qos_profile_services_default通信质量,这里使用服务默认的通信质量callback_group_service_,回调组,我们前面创建回调组就是在这里使用的,告诉ROS2,当你要调用回调函数处理请求时,请把它放到单独线程的回调组中
2.4.4 编写回调函数
现在我们开始编写回调函数,这里属于重点部分。先把整个代码放一下。
// 声明一个回调函数,当收到买书请求时调用该函数,用于处理数据
void sell_book_callback(const village_interfaces::srv::SellNovel::Request::SharedPtr request,
const village_interfaces::srv::SellNovel::Response::SharedPtr response)
{
RCLCPP_INFO(this->get_logger(), "收到一个买书请求,一共给了%d钱",request->money);
unsigned int novelsNum = request->money*1; //应给小说数量,一块钱一章
//判断当前书库里书的数量是否满足张三要买的数量,不够则进入等待函数
if(novels_queue.size()<novelsNum)
{
RCLCPP_INFO(this->get_logger(), "当前艳娘传奇章节存量为%d:不能满足需求,开始等待",novels_queue.size());
// 设置rate周期为1s,代表1s检查一次
rclcpp::Rate loop_rate(1);
//当书库里小说数量小于请求数量时一直循环
while (novels_queue.size()<novelsNum)
{
//判断系统是否还在运行
if(!rclcpp::ok())
{
RCLCPP_ERROR(this->get_logger(), "程序被终止了");
return ;
}
//打印一下当前的章节数量和缺少的数量
RCLCPP_INFO(this->get_logger(), "等待中,目前已有%d章,还差%d章",novels_queue.size(),novelsNum-novels_queue.size());
//rate.sleep()让整个循环1s运行一次
loop_rate.sleep();
}
}
// 章节数量满足需求了
RCLCPP_INFO(this->get_logger(), "当前艳娘传奇章节存量为%d:已经满足需求",novels_queue.size());
//一本本把书取出来,放进请求响应对象response中
for(unsigned int i =0 ;i<novelsNum;i++)
{
response->novels.push_back(novels_queue.front());
novels_queue.pop();
}
}
当收到请求时,先计算一下应该给张三多少书novelsNum,然后判断书库里书的数量够不够,不够则进入攒书程序。如果够或者攒够了就把书放到服务响应对象里,返回给张三。
你可能有一些疑问,我们并没有写把书放进书库(队列novels_queue)的程序呀,是的,这里我们还需要修改一下话题回调函数,增加了一行代码,将小说放到书库里novels_queue.push(msg->data);
// 收到话题数据的回调函数
void topic_callback(const std_msgs::msg::String::SharedPtr msg){
// 新建一张人民币
std_msgs::msg::UInt32 money;
money.data = 10;
// 发送人民币给李四
pub_->publish(money);
RCLCPP_INFO(this->get_logger(), "王二:我收到了:'%s' ,并给了李四:%d 元的稿费", msg->data.c_str(),money.data);
//将小说放入novels_queue中
novels_queue.push(msg->data);
};
2.5 修改main函数
因为我们要让整个程序变成多线程的,所以我们要把节点的执行器变成多线程执行器。
修改一下main函数,新建一个多线程执行器,添加王二节点并spin,完整代码如下:
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个Wang2的节点*/
auto node = std::make_shared<SingleDogNode>("wang2");
/* 运行节点,并检测退出信号*/
rclcpp::executors::MultiThreadedExecutor exector;
exector.add_node(node);
exector.spin();
rclcpp::shutdown();
return 0;
}
王二节点完整代码见:https://fishros.com/code/ros2/ros2_town/village_wang/src/wang2.cpp
2.6 编译
在工作空间下:输入下面的指令
colcon build --packages-select village_wang

2.7 运行测试
2.7.1 source环境
打开vscode终端,输入
source install/setup.bash
2.7.2 运行王二节点
ros2 run village_wang wang2_node
2.7.3 使用命令行发送买书请求
切分一个终端,source
source install/setup.bash
查看一下服务列表
ros2@ubuntu:~/code/town_ws$ ros2 service list -t
/sell_book [village_interfaces/srv/SellNovel]
手动发送买书请求
ros2 service call /sell_book village_interfaces/srv/SellNovel "{money: 5}"

2.7.4 启动李四写书
观察以上结果可以发现,我们并没有买到书,因为王二这里也没有,这时候就需要我们来启动李四节点来写书了。
再切分一个终端出来:
source install/setup.bash
启动李四写书
ros2 run village_li li4_node
2.7.5 结果展示
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VKDVzbo7-1636351122758)(http://fishros.com/d2lros2foxy/chapt4/4.10%E6%9C%8D%E5%8A%A1%E5%AE%9E%E7%8E%B0%28C%2B%2B%29/imgs/image-20210831124712850.png)]
3.客户端(张三)实现
编写完服务端的程序,接下来我们就可以编写客户端张三了。
3.1 编写ROS2服务通信客户端步骤
- 导入服务接口
- 创建请求结果接收回调函数
- 声明并创建客户端
- 编写结果接收逻辑
- 调用客户端发送请求
3.2 添加服务接口与依赖
3.2.1 创建客户端节点
因为张家村和张三之前不存在,这里我们需要新创建出来,命令如下:
打开终端到src文件夹下:
ros2 pkg create village_zhang --build-type ament_cmake --dependencies rclcpp
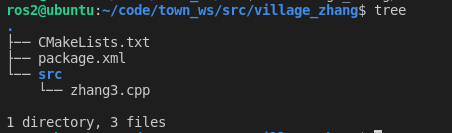
然后在src/village_zhang/src目录下新建zhang3.cpp
完成后目录结构如下:
3.2.2 创建客户端节点
因为张三要找王二请求小说,所以一定依赖通信接口village_interfaces
添加依赖是为了能够让程序在编译和运行时找到对应的接口
因为village_zhang是包类型是ament_cmake,与上面一样需要两步操作.
第一步修改package.xml
加入下面的代码(告诉colcon,编译之前要确保有village_interfaces存在)
<depend>village_interfaces</depend>

第二步修改和CMakeLists.txt
在CMakeLists.txt中加入下面一行代码
find_package(village_interfaces REQUIRED)
find_package是cmake的语法,用于查找库。找到后,还需要将其和可执行文件链接起来
接着添加可执行文件
add_executable(zhang3_node src/zhang3.cpp)
上面找到库之后,将其与可执行文件链接起来,还需要修改ament_target_dependencies,在其中添加rclcpp 和 village_interfaces。
ament_target_dependencies(zhang3_node
rclcpp
village_interfaces
)
3.3 创建张三节点、服务客户端、请求函数和请求结果回调函数
3.3.1 创建客户端
接着我们就可以编写客户端了,穷光蛋张三也是C++,我们可以参考王二的代码,建立一个C++节点的基本的框架。
#include "rclcpp/rclcpp.hpp"
#include "village_interfaces/srv/sell_novel.hpp"
// 提前声明的占位符,留着创建客户端的时候用
using std::placeholders::_1;
/*
创建一个类节点,名字叫做PoorManNode,继承自Node.
*/
class PoorManNode : public rclcpp::Node
{
public:
/* 构造函数 */
PoorManNode(std::string name) : Node(name)
{
// 打印一句自我介绍
RCLCPP_INFO(this->get_logger(), "大家好,我是得了穷病的张三.");
}
private:
};
/*主函数*/
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个Zhang3的节点*/
auto node = std::make_shared<PoorManNode>("zhang3");
/* 运行节点,并检测rclcpp状态*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
3.3.2 声明客户端
这里只是声明客户端,并指明这个客户端的类型是village_interfaces::srv::SellNovel
// 创建一个客户端
rclcpp::Client<village_interfaces::srv::SellNovel>::SharedPtr client_;
3.3.3 创建请求函数和回调函数
在class里的public下新建两个函数,第一个函数用于买小说,第二个函数用于回调买小说的结果response。
/*买小说函数*/
void buy_novel()
{
RCLCPP_INFO(this->get_logger(), "买小说去喽");
}
/*接收小说-回调函数*/
void novels_callback(rclcpp::Client<village_interfaces::srv::SellNovel>::SharedFuture response)
{
}
完整代码:
#include "rclcpp/rclcpp.hpp"
#include "village_interfaces/srv/sell_novel.hpp"
// 提前声明的占位符,留着创建客户端的时候用
using std::placeholders::_1;
/*
创建一个类节点,名字叫做PoorManNode,继承自Node.
*/
class PoorManNode : public rclcpp::Node
{
public:
/* 构造函数 */
PoorManNode() : Node("zhang3")
{
// 打印一句自我介绍
RCLCPP_INFO(this->get_logger(), "大家好,我是得了穷病的张三.");
}
/*买小说函数*/
void buy_novel()
{
RCLCPP_INFO(this->get_logger(), "买小说去喽");
}
/*接收小说-回调函数*/
void novels_callback(rclcpp::Client<village_interfaces::srv::SellNovel>::SharedFuture response)
{
}
private:
// 创建一个客户端
rclcpp::Client<village_interfaces::srv::SellNovel>::SharedPtr client_;
};
/*主函数*/
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个PoorManNode的节点*/
auto node = std::make_shared<PoorManNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
3.4 实例化客户端、编写请求函数和回调函数
3.4.1 实例化客户端
这个我们很熟悉了,先声明再实例化,在构造函数里加一句话。
//实例化客户端
client_ = this->create_client<village_interfaces::srv::SellNovel>("sell_novel");
实例化调用自身的create_client函数即可,这个函数依然是一个模板函数。
这里实例化的时候也要指明客户端的接口类型,同时指定要请求的服务的名称sell_novel.
3.4.2 编写请求函数buy_novel
编写请求函数but_novel()。
整个函数可以分为三个部分:
- 等待服务端上线
- 构造请求数据
- 发送异步请求
void buy_novel()
{
RCLCPP_INFO(this->get_logger(), "买小说去喽");
//1.等待服务端上线
while (!client_->wait_for_service(std::chrono::seconds(1)))
{
//等待时检测rclcpp的状态
if (!rclcpp::ok())
{
RCLCPP_ERROR(this->get_logger(), "等待服务的过程中被打断...");
return;
}
RCLCPP_INFO(this->get_logger(), "等待服务端上线中");
}
//2.构造请求的钱
auto request = std::make_shared<village_interfaces::srv::SellNovel_Request>();
//先来五块钱的看看好不好看
request->money = 5;
//3.发送异步请求,然后等待返回,返回时调用回调函数
client_->async_send_request(request,std::bind(&PoorManNode::novels_callback, this, _1));
};
结构还是很清晰的,等待服务端上线的时候我们使用的是client_->wait_for_service这个函数,该函数有一个参数是超时时间,小鱼这里设置成1s,如果服务端没有上线则一直等待。
第二部分构造请求的钱,C++还是一如既往的长,这里使用make_shared创建了一个指向village_interfaces::srv::SellNovel_Request的指针,并赋值给了requet。可以理解为创建了一个钱袋。
auto request = std::make_shared<village_interfaces::srv::SellNovel_Request>();
创建好钱袋(request)之后,我们开始往钱袋里装钱,这里装了5块钱。
//先来五块钱的看看好不好看
request->money = 5;
第三步发送请求
这一步我们和Python中一样,发送的是异步请求,并且设置了一个回调函数,意思是当我们请求(买书)成功时,请调用这个回调函数,把结果通过回调函数的参数传递过来。
关于回调函数前面提过好几次了,小鱼也在公众号上写了相关的文章,不明白的同学可以前往翻阅。
3.4.3 编写回调函数处理结果
接着编写回调函数novels_callback处理结果,完整的回调函数内容如下,也很简单,获取结果然后遍历结果打印。
注意函数的参数并不是
SellNovel的Response对象,而是SharedFuture,这个小鱼会写篇文章说一说。这里直接用就行,使用response的get()获取。
//创建接收到小说的回调函数
void novels_callback(rclcpp::Client<village_interfaces::srv::SellNovel>::SharedFuture response)
{
auto result = response.get();
RCLCPP_INFO(this->get_logger(), "收到%d章的小说,现在开始按章节开读", result->novels.size());
for(std::string novel:result->novels)
{
//打印小说章节内容
RCLCPP_INFO(this->get_logger(), "%s", novel.c_str());
}
RCLCPP_INFO(this->get_logger(), "小说读完了,好刺激,写的真不错,好期待下面的章节呀!");
}
3.4.4 修改main函数调用请求函数
完成上面的工作之后还需要修改一下main函数来调用一下我们的买小说函数。
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个Zhang3的节点*/
auto node = std::make_shared<PoorManNode>();
node->buy_novel();
/* 运行节点,并检测rclcpp状态*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
完成代码参考:ros2_town/wang2.cpp · fishros
3.5 修改CmkeLists.txt并编译
3.5.1 添加指令
张三节点之前没有安装过,这里需要在CMakeLists.txt加入一个安装指令,将编译好的可执行文件,安装到install目录下。
install(TARGETS
zhang3_node
DESTINATION lib/${PROJECT_NAME}
)
3.5.2 编译
colcon build --packages-select village_zhang

4.测试
完成了张三和王二的客户端和服务端的程序后,我们就可以测试啦。
4.1运行张三
打开新终端,先source再运行张三
source install/setup.bash
ros2 run village_zhang zhang3_node
4.2 运行王二
切分终端,source并运行王二
source install/setup.bash
ros2 run village_wang wang2_node
4.3 运行李四写书
切分终端,source并运行李四
source install/setup.bash
ros2 run village_li li4_node
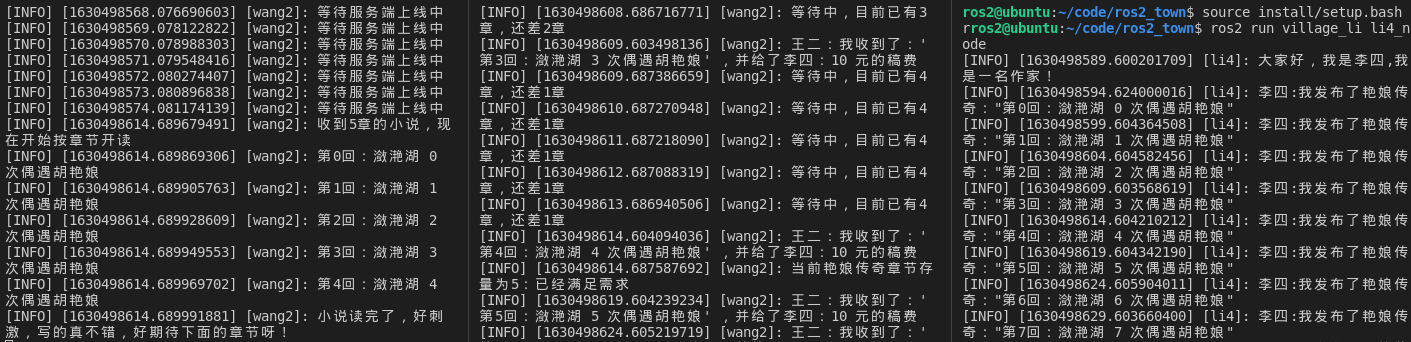
4.5 结果展示
4.测试
完成了张三和王二的客户端和服务端的程序后,我们就可以测试啦。
4.1运行张三
打开新终端,先source再运行张三
source install/setup.bash
ros2 run village_zhang zhang3_node
4.2 运行王二
切分终端,source并运行王二
source install/setup.bash
ros2 run village_wang wang2_node
4.3 运行李四写书
切分终端,source并运行李四
source install/setup.bash
ros2 run village_li li4_node
4.5 结果展示
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-SsQrAU4e-1636351496658)(http://d2lros2foxy.fishros.com/chapt4/4.10服务实现(C++)]/imgs/image-20210901201805844.png)
作者介绍:
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小智,一起交流技术,学习机器人