线性变换是一种映射,对于向量来说,就是线性空间到线性空间的映射。这里不严格给出线性变换的定义,但举例来说,投影变换、反射变换、不定积分等都可以看做是线性变换。与线性变换相对的是仿射变换,例如:
就是一个仿射变换,访射变换可以理解为线性变换加上一个平移操作。
二维空间中,旋转算子对应的变换矩阵是
不失一般性,当
的时候,变换矩阵为:
假设分别有两组基
是以
为基的向量
的坐标.
变换矩阵
恰好等于上面的向量.
下面再给一个三维空间到二维空间下线性变换的例子
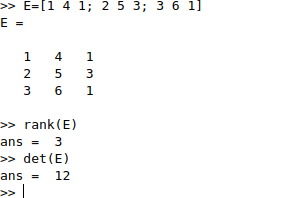
假设下的一组基为:
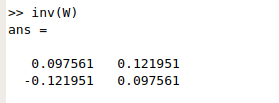
E满秩,非退化,可以作为三维空间的一组基.
是
下的一组基
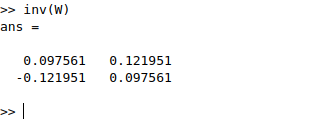
W也非退化,可以作为二维空间的一组基.
设基E下一三维向量
验证:
验证成立,
恰好是以
为基,以
为坐标的三维(
)在二维空间(
)上的投影.
z轴坐标可以不用考虑,因为z轴正交于xoy平面,投影到二位空间后,z维度信息消失了.
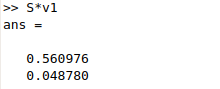
所以,对应的线性变换,变换后,以W为基的坐标仍为
所以,以标准坐标系度量的,变换后的向量实际上为:
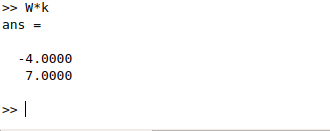
是变换前的向量,
是变换 后的向量。发现它们正好是垂直的关系,表示旋转90度的线性变换,符合预期:

或者这样理解
映射的基分别为
所以,变换是单位矩阵.原因可能是线性变换和基重合了.
倒过来看:
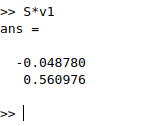
所以,对应的线性变换,变换后,以W为基的坐标为
所以,以标准坐标系度量的,变换后的向量实际上为:
求L相应于有序基
和
的表示矩阵,其中
且
求解过程:
假设
令
令为将
中将向量逆时针旋转45度的线性算子,求
相应于有序基
的表示矩阵。
变换矩阵为
可以看出,不同的基下,同一个变换之间是相似的。
令
及
分别为和
的有序基,若
为一线性变换,且
为
相应于
和
的表示矩阵,则:
其中
证明过程:
若为
相应于
和
的表矩阵,则对
,有:
矩阵为非奇异方阵,因为它是
的一组基,所以:
举栗子:
则和
分别为
空间中,两个互相垂直的正交基。
设变换逆时针旋转45°,则
相应于
和
的表示矩阵A求解过程为:
相应于
和
的表示矩阵,即是
中的
经
变换后,在
中的坐标表示。
则
所以:
所以:
所以,相当于顺时针旋转了45°.
这个问题好有一比,想象我们和另一个维度的“人类” 共同生活在同一个地球上,我们彼此看不见是因为我们身处不同的两个维度。
两个维度的“人类”生活方式完全相同,但是有一点不同,就是对方位的定义,对哪个方向定义为“东”, “南”, “西”, “北”有分歧,如下图所示:

黑色“人类”按照,上北,下南,左西,右东的方式定义方位。
红色“人类”按照 上东,下西, 左北,右南的方式定义方位。
从线性空间理论的角度来说,两个维度的生物定义的单位矩阵不同,虽然在各自的世界里面,都表示成:
但是,从黑色世界的角度,红色世界的单位阵逆时针旋转了90°,所以,红色的单位矩阵在黑色世界看来,是
红色世界的坐标
,
在黑色世界看来,是:
同样,从红色世界的角度,黑色世界的单位矩阵顺时针旋转了90°,所以,黑色的单位阵在红色世界看来,是
黑色世界的坐标
,
在红色世界看来,是,
两个世界对各自的单位矩阵的形式
深信不疑,坚决排斥来自另一个世界的异端邪说,所以,地球上同一个位置,在两个 世界中各自有不同的坐标,彼此之间可以通过变换得出。