一、线性变换
1.1 什么是线性变换
首先给出一个比较抽象的解释方式:
对于一个变换A,找两个向量,如果这个变换满足可加性与齐次性:
A(α+β)=Aα+Aβ
A(kα)=k(Aα)
那么这个变换就是线性变换
1.2 从函数角度理解
1.2.1 首先复习下函数
函数客观的讲就是把x轴上的点映射到曲线上,以下是一个正弦函数:
1.2.2 线性函数
有的函数,比如y=x,是把x轴上的点映射到直线上,这种称之为线性函数:
1.3 从线性函数到线性变换
线性函数其实就是线性变换,为了看起来更像线性变换,这里换一种标记方法:
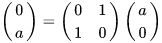
之前的y=x,可以认为是把
(a,0)映射到了
(0,a)点,这被称为线性变换T,记作:

矩阵的形式如下:
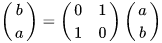
这里将
(a,0)替换为平面内所有的点
(a,b),我们就可以对整个平面做变换,该线性变换记作:

写成矩阵的形式:
我们记:

这时可以得到一个更简便的记法(这种形式看起来更像线性方程
y=ax):

我们已经假定
y
,x
指代了平面上所有的点,所以干脆可以更简化为:
线性变换通过矩阵A来表示
而y=x不过是这个A的一个特殊情况
1.4 矩阵A与基
刚才的结论其实是不完整的,还缺少了一个信息:
y=x是基于直角坐标系的,通过这个转换:
得到的A也是基于直角坐标系的。
只是在线性变换中,我们不称之为直角坐标系,而是叫做标准正交基。
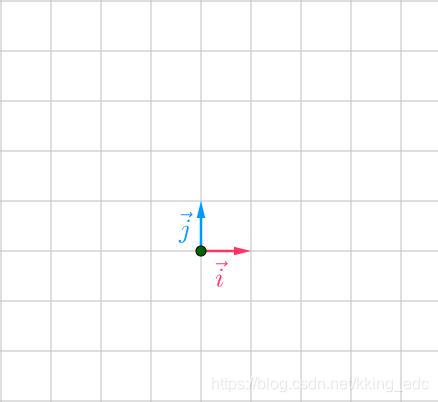
标准正交基是:
它们张成的线性空间如下:
这里,对前面的结论进行一个补充:
线性变换通过指定基下的矩阵A来表示
注意这个”指定基“,这说明基不一定固定为正交基,由此引出相似矩阵的概念。
二、相似矩阵
2.1 定义:
设
A,B都是n阶矩阵,若有n阶可逆矩阵
P,使:

则称
B是
A的相似矩阵,或者说
A和
B相似。
2.2 解释
那怎么得到不同基下的矩阵呢? 这里看下具体的变换细节。
2.2.1 细节
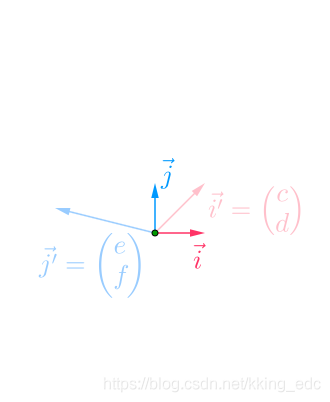
首先看一个图,下面给出关于图的解释:
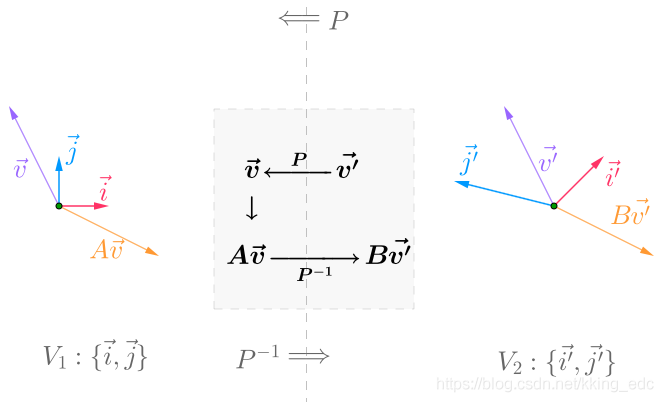
- 有两个基:
V1:{i
,j
}和
{i′
,j′
}
-
V1→V2,可以通过
P−1转换
-
V2→V1,可以通过
P转换
整个转换的核心如下:

对上面的图进行解释:
-
v′
是
V2的点
-
v′
通过
P变为
V1下的点,即
Pv′
- 在
V1下,通过矩阵
A完成线性变换,即
APv′
- 通过
P−1变回
V2下的点,即
P−1APv′
综上,我们可以有:
我们可以认为:

那么B和A互为相似矩阵。
这里还有一个细节:
V2→V1的转换矩阵
P是什么?
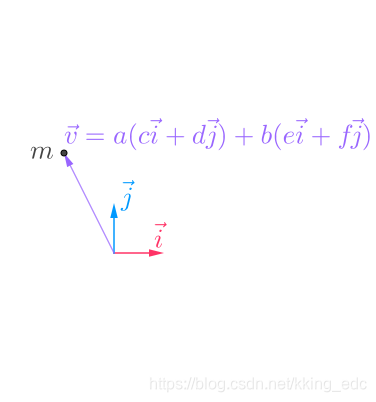
首先看空间中的一个点,假设为
m点:
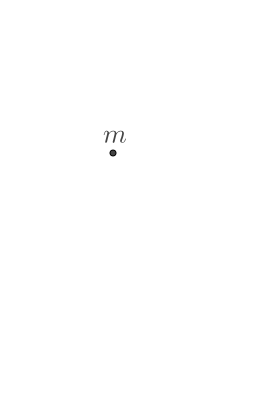
这时我们知道,不管有没有基,这个点都是客观存在的,然后给出其在
i′
,j′
的坐标
v′
:
为了表示
v′
是
i′
,j′
下的坐标,我们写成这样:
如果我们知道了
i′
,j′
在
i
,j
下的坐标:
那么有:
v′
=ai′
+j′
=a(ci
+dj
)+b(ei
+fj
)
此时,实际上m点的坐标,已经变到了
i
,j
下的
v
:
继续推导:
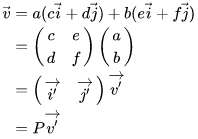
所以P其实就是:
这里的
i′
,j′
是在
i
,j
下的坐标。
2.2.2 对角矩阵
为什么我们需要相似矩阵呢?
比如A这个矩阵:
可以这样分解:
其中:
B就是对角矩阵,看上去好看很多,相似变换其实就是坐标转换,转换到一个更方便计算的简单坐标系。
https://www.matongxue.com/madocs/491.html
2.3 相似的性质:
- 反身性:
A∽A(I−1AI=A)
- 对称性:
A∽B⇒B∽A
(A∽B⇒P−1AP=B⇒A=(P−1)−1BP−1)
- 传递性:
A∽B,B∽C,⇒A∽C
P1−1AP1=B,P2−1BP2=C
∴P2−1P1−1AP2P1=C
∴(P1P2)−1A(P1P2)=C
- 相似矩阵的秩相同
三、对角矩阵
3.1 矩阵可对角化
如果矩阵
A能与对角矩阵相似,则称
A可对角化
例子:
设
A=[1212],P=[12−11] ,则有:
P−1AP=[3000]
即:
A∽[3000]
从而
A可对角化
3.2 可对角化的条件
3.2.1 定理1:n阶矩阵A可对角化的充分必要条件是A有n个线性无关的特征向量
证明:
必要性:
如果A可对角化,则存在可逆矩阵P,使得:
A=⎣⎢⎢⎢⎡λ10⋮00λ2…000…0……⋱…00⋮λn⎦⎥⎥⎥⎤
将P按列分块得到
P=[X1,X2,...,Xn],从而有:
AP=A[X1,X2,...,Xn]=P⎣⎢⎢⎢⎡λ10⋮00λ2…0……⋱…00⋮λn⎦⎥⎥⎥⎤=[X1,X2,...,Xn]⎣⎢⎢⎢⎡λ10⋮00λ2…0……⋱…00⋮λn⎦⎥⎥⎥⎤
因此有:
AXi=λiXi(i=1,2,...,n),所以
Xi是A的属于特征值
λi的特征向量,又由P可逆,知
X1,X2,...,Xn线性无关,故A有n个线性无关的特征向量。
3.2.2 定理2:矩阵A的属于不同特征值的特征向量是线性无关的
3.2.3 推论1:若n阶矩阵有n个互不相同的特征值
λ1,λ2,...,λn,则A可对角化,且:
3.2.4 定理三
https://wenku.baidu.com/view/58dcd9d376eeaeaad1f33024.html
3.3 对角矩阵的性质
3.3.1 对角矩阵的秩等于其对角线上非零元素的个数。
四、可逆矩阵
4.1 定义
设A为n阶方阵,若存在n阶方阵B,使得:
AB=BA=I
则称A为可逆矩阵,B为A的逆矩阵,记为
A−1=B
单位矩阵I:
I−1=I
(kI)−1=k1I,(k=0)
对角矩阵:
D=
⎣⎢⎢⎢⎡d10⋮00d2…0……⋱…00⋮dn⎦⎥⎥⎥⎤,(d1,d2,...dn=0);D−1=⎣⎢⎢⎢⎡d110⋮00d21…0……⋱…00⋮dn1⎦⎥⎥⎥⎤
4.2 定理
4.2.1 定理1:设A可逆,则它的逆是唯一的
证明:
设有B和C满足:AB=BA=I,AC=CA=I
则:B=BI=B(AC)=(BA)C=IC=C
4.2.2 定理2:设A为n阶矩阵,则下列命题等价:
- A是可逆的
- AX=0只有零解
1→2:设A是可逆的,且X是AX=0的解,则:
X=IX=(A−1A)X=A−1(AX)=A−10=0
所以,AX=0只有零解
- A与I行等价
2→3:A经过初等行变换到B(行阶梯矩阵)
BX=0只有零解,B的对角元均非零,否则B的最后一行的元全为零,则BX=0有非零解(矛盾)
则,B经初等行变换后得到的行最简化矩阵=I
- A可表为有限个初等矩阵的乘积
3→4:由3,可得A可经初等行变换得到I,所以存在初等矩阵E1,E2,...Ek,使得Ek,...E1A=I
A=E1−1....Ek−1I=E1−1...Ek−1
4.2.3 推论:设A为n阶矩阵,则AX=b有唯一解的充要条件是A可逆
证明:
充分性:
AX=b有唯一解:X=A−1b
必要性:
设AX=b有唯一解X,但A不可逆
A不可逆⇒AX=0有非零解Z
令Y=X+Z
AY=A(X+Z)=AX+AZ=b+0=b
则Y为AX=b的解,矛盾
所以可得A可逆
4.3 性质
设A,B皆为n阶可逆矩阵,数
λ=0,则:
-
A−1可逆,且
(A−1)−1=A
-
λA可逆,且
(λA)−1=λ1A−1
-
AB可逆,且
(AB)−1=B−1A−1
(AB)(B−1A−1)=A(BB−1)A−1=AA−1=I
-
AT可逆,且
(AT)−1=(A−1)T
AT(A−1)T=(A−1A)T=I
- 逆矩阵行列式和原矩阵行列式的关系
https://wenku.baidu.com/view/84eda27b27284b73f24250ce.html?sxts=1591611918853
五、过渡矩阵
过渡矩阵是基与基之间的一个可逆线性变换,在一个空间V下可能存在不同的基。假设有两组基分别为A,B。由基A到基B可以表示为B=AP,过渡矩阵
P=A−1B,它表示的是基与基之间的关系。