机器人系统可以配备各种各样的安全保护装置,例如门互锁开关、 安全光栅等,例如我们经常使用的护栏安全门锁,在机器人运行程序时,断开安全门锁可以使机器人停止,已保证人员的安全。ABB机器人提供的安全回路有如下4种:
ES(Emer Stop)紧急停止:
一旦触发ES回路,无论机器人在何种运行模式下,都会立即停止,且在报警没有确认(松开急停,上电按钮上电)的情况下,机器人是无法启动继续运行的。ES建议只有在紧急的情况下再去使用,不正确使用会影响机器人的使用寿命。
AS(Auto Stop)自动停止:
自动停止只有在机器人自动运行模式下才会起作用。自动停止常用于在机器人自动运行时监控其附属安全装置的状态,如护栏安全门锁,安全光幕等等。
GS(General Stop)常规停止:
GS在机器人的所有运行模式下都有效。只要触发GS,机器人就无法上电。这个一般很少用,比如手动jog机器人时,如果配置了GS,真的感觉好麻烦。
SS(Superior Stop)上级停止:
SS主要用于与外部设备进行连接,如安全plc。在机器人任何运行模式下都有效。这个也一般很少用。
知道了这四种安全回路的含义,下面我们来介绍一下最常用的ES与AS回路的接线方法。
IRC5标准型控制柜:

ES(Emer Stop)紧急停止:
将安全面板的X1与X2的第3脚与4脚的连接断,机器人就会进入紧急停止状态。ES1与ES2要分别单独接入无源NC常闭触点。ES1与ES2要同时使用。接线方式如下图所示:

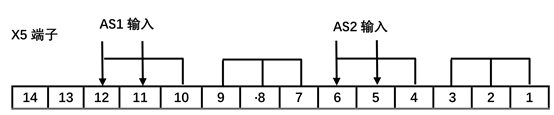
AS(Auto Stop)自动停止:
将安全面板的X5的5脚与6脚、11脚与12脚的连接断开,机器人就会进入自动停止状态。AS1与AS2要分别单独接入无源NC常闭触点。AS1与AS2要同时使用。接线方式如下图所示:
IRC5 Compact紧凑型控制柜:


ES(Emer Stop)紧急停止:
将安全面板的XS7与XS8的第1脚与2脚的连接断,机器人就会进入紧急停止状态。ES1与ES2要分别单独接入无源NC常闭触点。ES1与ES2要同时使用。接线方式如下图所示:

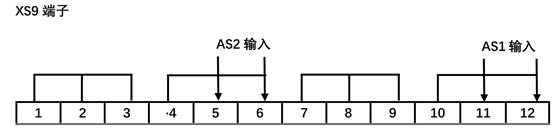
AS(Auto Stop)自动停止:
将安全面板的XS9的5脚与6脚、11脚与12脚的连接断开,机器人就会进入自动停止状态。AS1与AS2要分别单独接入无源NC常闭触点。AS1与AS2要同时使用。接线方式如下图所示:
文章首发自动化生产之家

