任何带有逻辑的机器都离不开程序,程序是他们的“灵魂”,当然机器人也不例外。光有“魁梧”的躯体还不够,他们也需要思维赋予他们灵性。在ABB机器人中,机器人的程序被称为RAPID,所有的机器人的行为都是通过RAPID语言或者RAPID指令来进行描述与控制的。不同的操作对应不同的指令,比如移动机器人需要一个指令,设置机器人的输出又需要另外的指令。无论是通过FlexPendant示教器还是RobotStudio,RAPID程序的编写都是通过程序编辑器来进行的,所以程序编辑器就是机器人的“灵魂入口”。在之前的文章中,我们已经详细的讨论过程序编辑器里调试菜单中的功能含义,这一次我们就再来讨论一下程序编辑器中代表机器人“灵魂”的指令在列表中是如何分类的。毕竟指令这么多,找到心仪的那个“它”没点方法还是有些麻烦的。

Common常用的指令
该分类下是我们最常用的指令。包括赋值、逻辑、运动等指令。

Prog.Flow(Controlling the program flow)控制程序流程类
在ABB机器人中,程序都是按照一定的顺序(也可以理解为按照指令的规划)执行的。除了按照由上至下的顺序执行外,我们还可以通过指令中断循序执行过程或者调用其它指令或程序,以处理执行期间可能出现的各种情况或者实现更加复杂的控制逻辑要求。
在ABB机器人中所有的控制流程都是基于以下的五种原理
1、调用另一程序(无返回值程序)并在执行该程序后,按指令继续执行;
2、基于是否满足给定条件,执行不同指令;
3、重复某一指令序列多次,直到满足给定条件;
4、移至同一程序中的某一标签;
5、终止程序执行过程。

Various(Various instructions)各种指令
该分类下有如下四种指令:
1、 给数据赋值;
2、 等待一段指定时间或等到满足条件时;
3、 在程序中插入注释;
4、 加载编程模块。

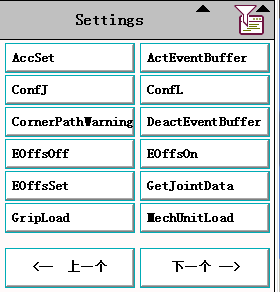
Settings(Motion settings)运动设置
该分类中包含了与机器人运动参数设置相关的指令
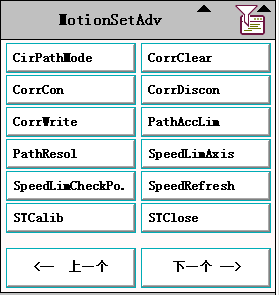
Motion&Proc/ Motion Adv./ MotionSetAdv运动
运动类中包含了所有控制机器人运动的指令。


I/O(Input and output signals)输入输出
该分类下包含有与机器人输入输出有关的信号

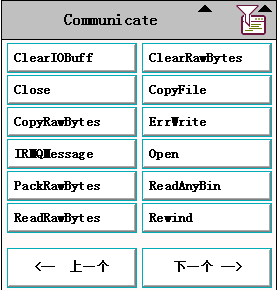
Communicate(Communication)通信
该分类包含机器人与人和机器人与其它设备进行通信的指令
Interrupts中断
该分类下包含有与中断程序有关的指令

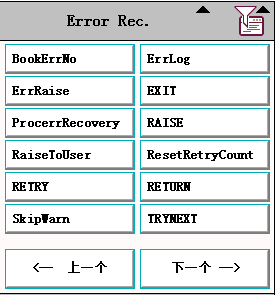
Error Rec.(Error recovery)错误恢复
该分类下包含有与错误相关的指令。
System & time系统与时间
该分类里包含系统和时间指令支持用户测量、检查和记录时间。
Mathematics数学
该分类下的指令用于计算与修改数据数值。

你们发现了吗?赋值指令在这个分类里又一次出现了,这就说明同一个指令存在于多个分组中。
Ext.computer(External computer communication)外部计算机通信
该分类中包含与外部计算机通信相关的指令
该分类下的指令在有的robotware版本中被合并到Communicate分类中了。

Multitasking& MultiMove多任务与多运动
该分类下包含与多任务和多运动相关的指令。
RAPID support(RAPID support instructions)RAPID配套指令
包含与RAPID相配套的指令

Calib& service(Calibration & service)校准&服务
该分类下包含用于校准和测试机器人本体的指令。
M.C1~ M.C3(Most Common Instruction)最常用的指令
这是ABB机器人为我们预留的可供自定义修改指令列表的分类。

在控制面板中的Man-machine communication主题中可以对该分类的内容进行个性化设置。

指令列表的分类就是这些了,如果你的机器人的系统版本是robotware6.06及以上,那么指令列表中还有一个过滤器的功能也可以使用,让我们抛开分类的限制通过输入指令字母快速索引到你想使用的指令。




这次的分享就到这里了,如果本文对你有帮助或者启发,那就动动你可爱的小手点下在看或者转发到朋友圈吧,让它帮助启发更多的人。
文章首发自动化生产之家

